
Journal of Systems Engineering and Electronics ›› 2024, Vol. 35 ›› Issue (3): 753-768.doi: 10.23919/JSEE.2023.000121
• CONTROL THEORY AND APPLICATION • Previous Articles
Yue ZANG1( ), Yao ZHANG1,*(), Quan HU1(), Mou LI2(), Yujun CHEN2()
), Yao ZHANG1,*(), Quan HU1(), Mou LI2(), Yujun CHEN2()
Received:2022-01-04
Online:2024-06-18
Published:2024-06-19
Contact:
Yao ZHANG
E-mail:zangyue2016@bit.edu.cn;zhangyao@bit.edu.cn;huquan@bit.edu.cn;limou2333@163.com;chenyj1001@163.com
About author:Supported by:Yue ZANG, Yao ZHANG, Quan HU, Mou LI, Yujun CHEN. Contact detumbling toward a nutating target through deformable effectors and prescribed performance controller[J]. Journal of Systems Engineering and Electronics, 2024, 35(3): 753-768.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
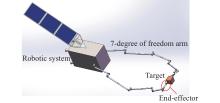
Fig 1
Contact detumbling scene"
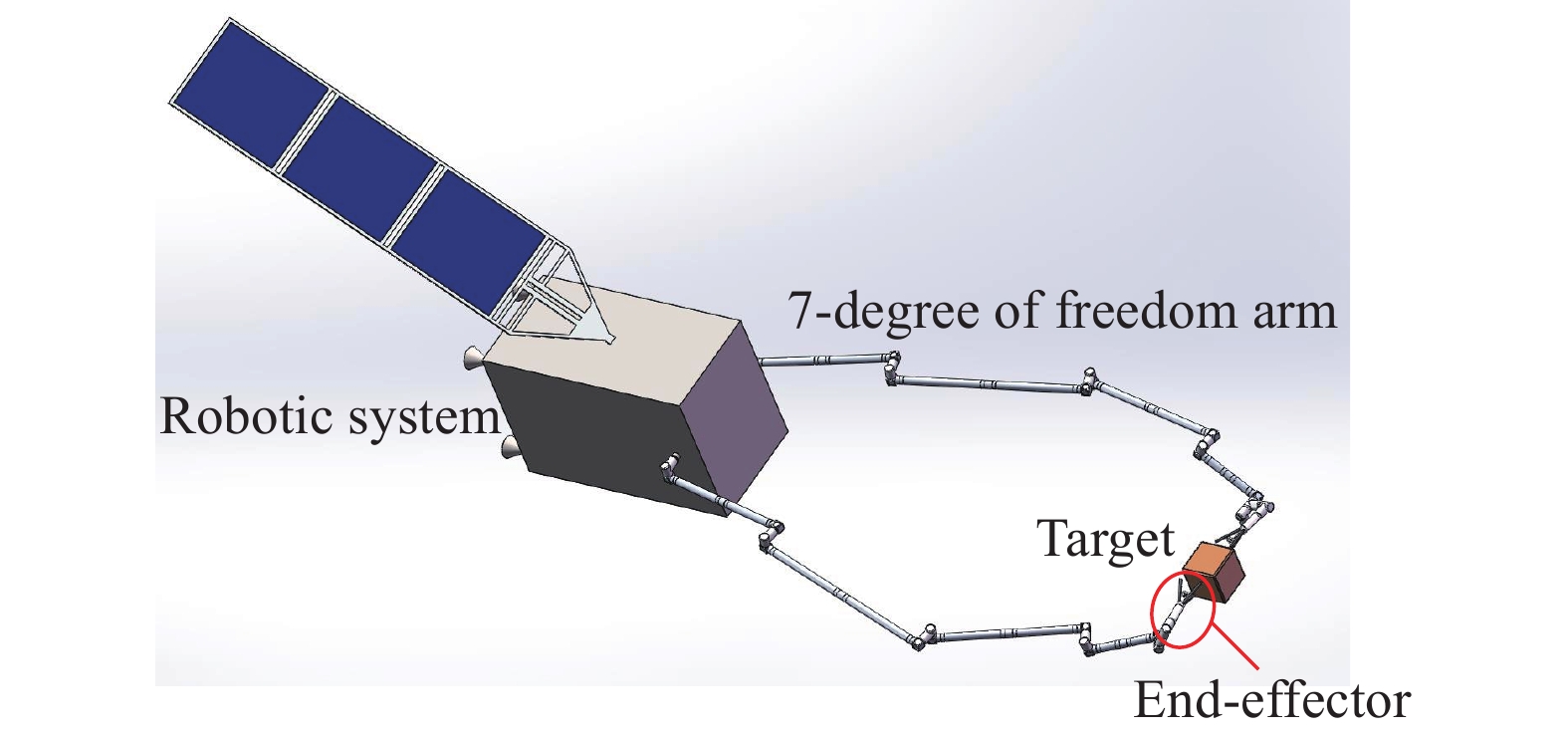

Fig 2
Motion envelope of the rotating targe"
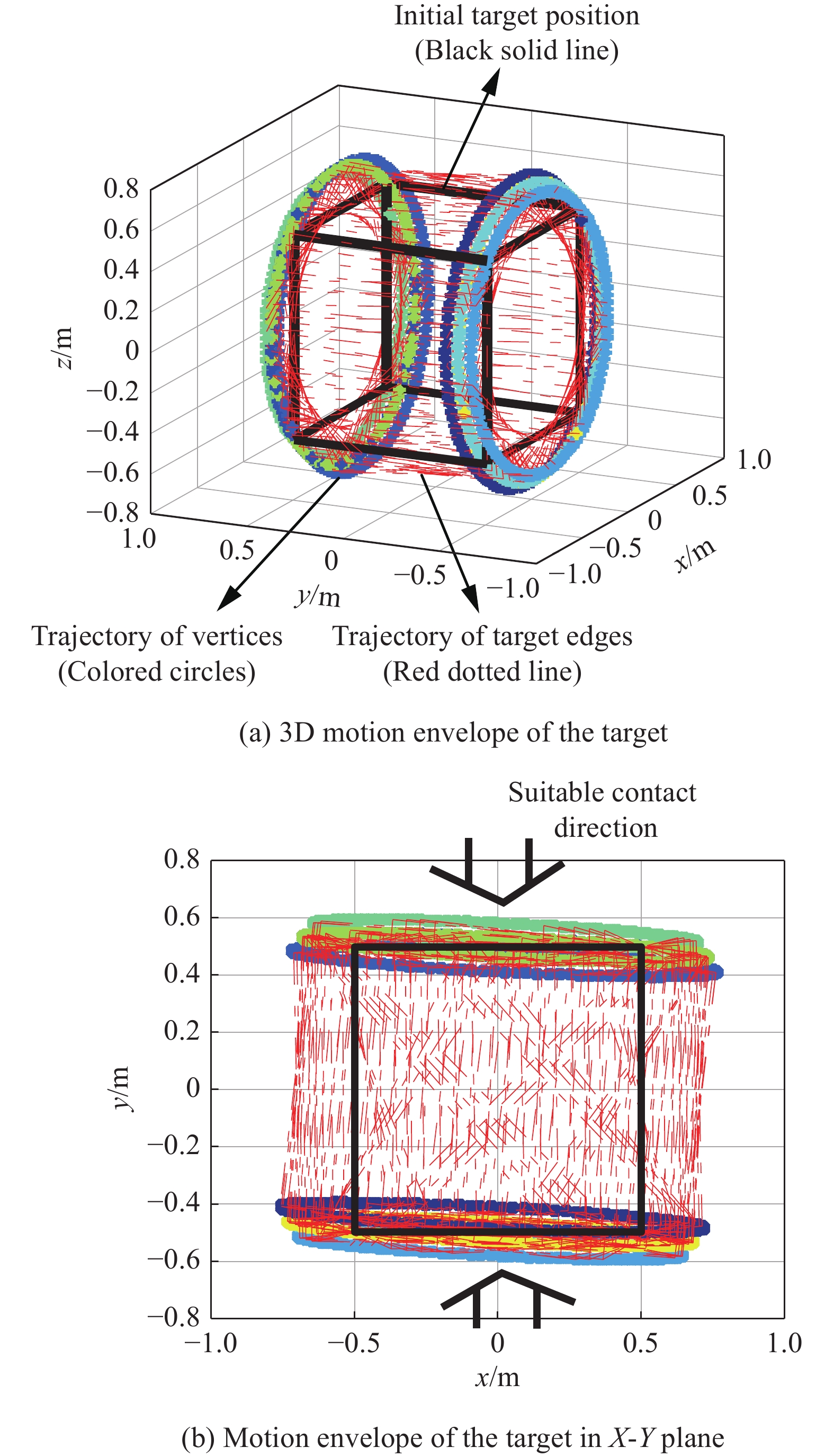
Fig 3
Ideal contact configuration"
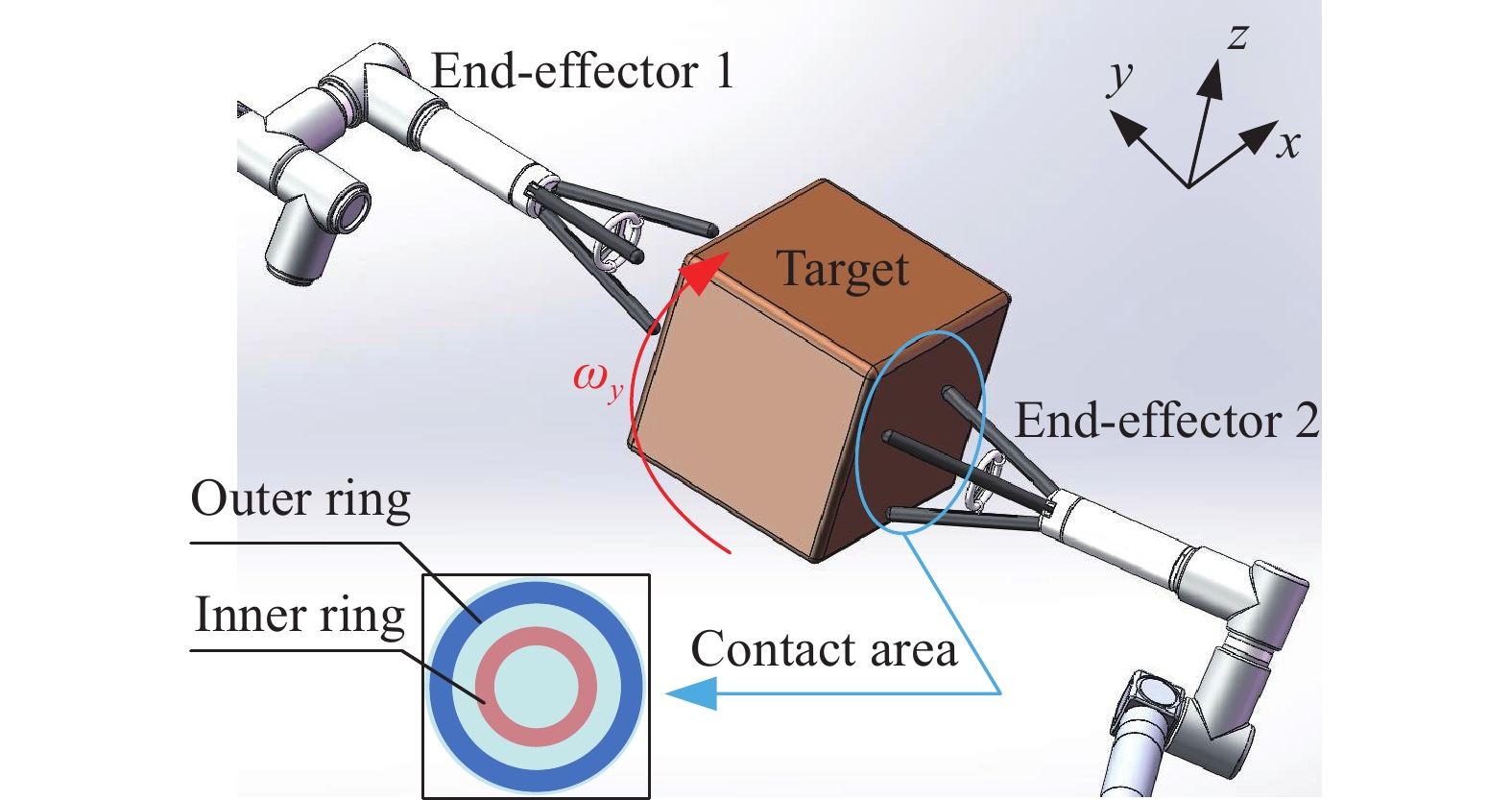
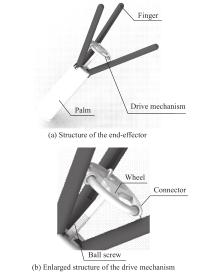
Fig 4
Structure of the hand-shaped deformable end-effector"
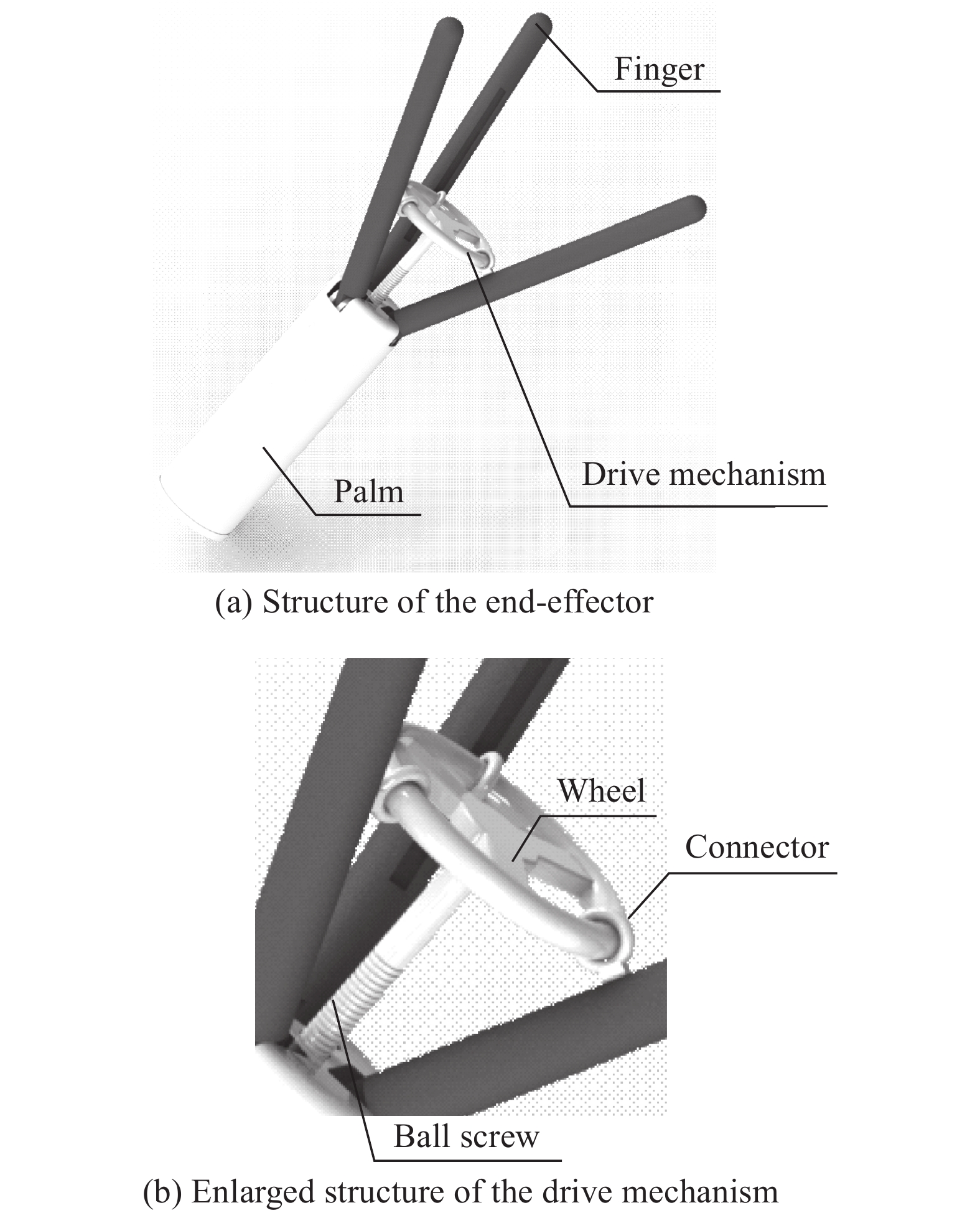

Fig 5
Structure diagram of the end-effector"
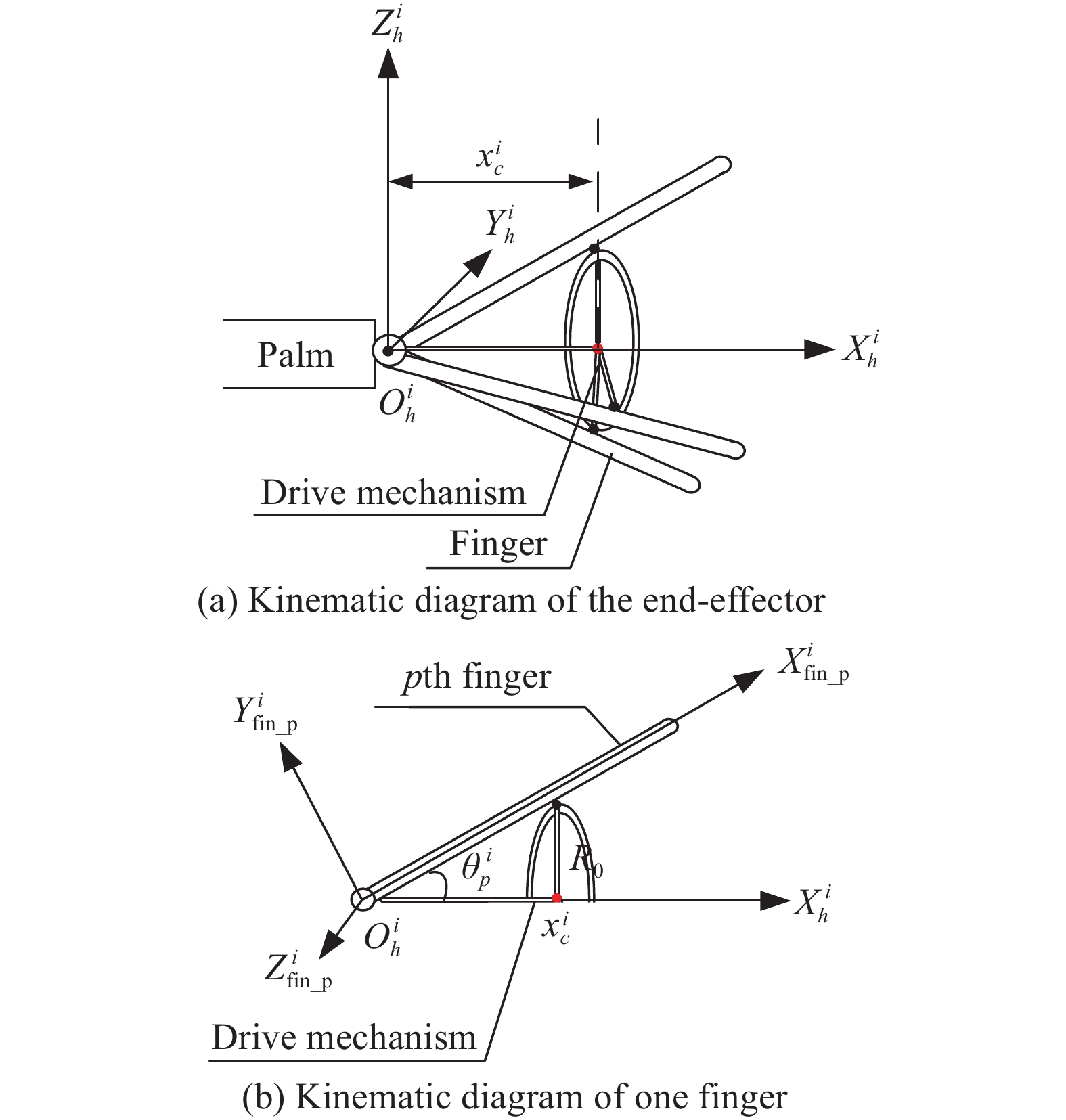

Fig 6
Two extreme states of the effector"

Table 1
Deformation range of the end-effector"
| Parameter | Range | |
| Closed | Opened | |
| xc/m | 0.350 | 0.050 |
| θp/(°) | 30.000 | 75.964 |
| Lc/m | 0.433 | 0.121 |
| rc/m | 0.250 | 0.485 |
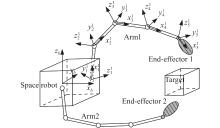
Fig 7
Imaginary scene of the robot and its operation target"
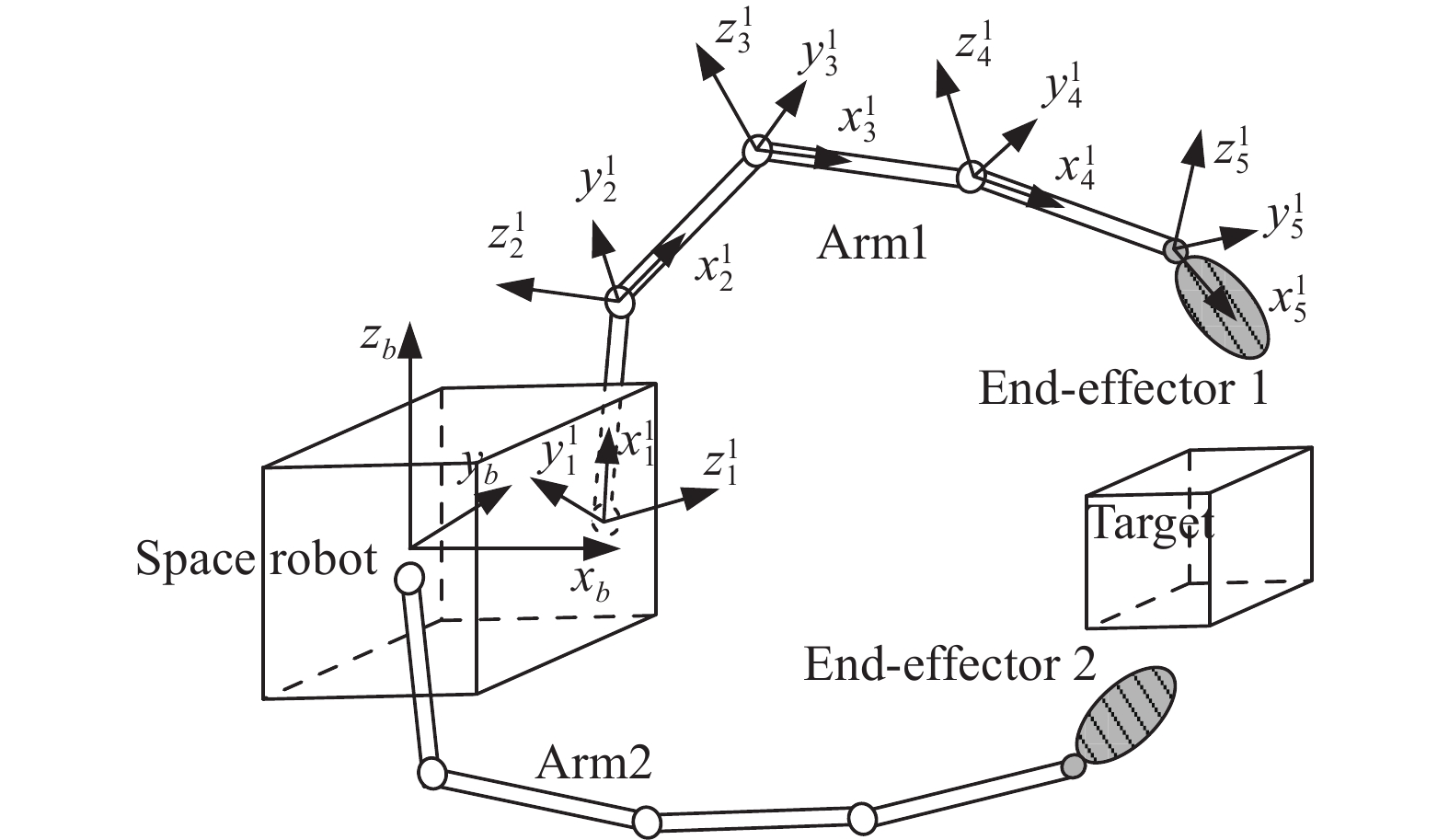
Fig 8
End tip motion carried out in two ways"
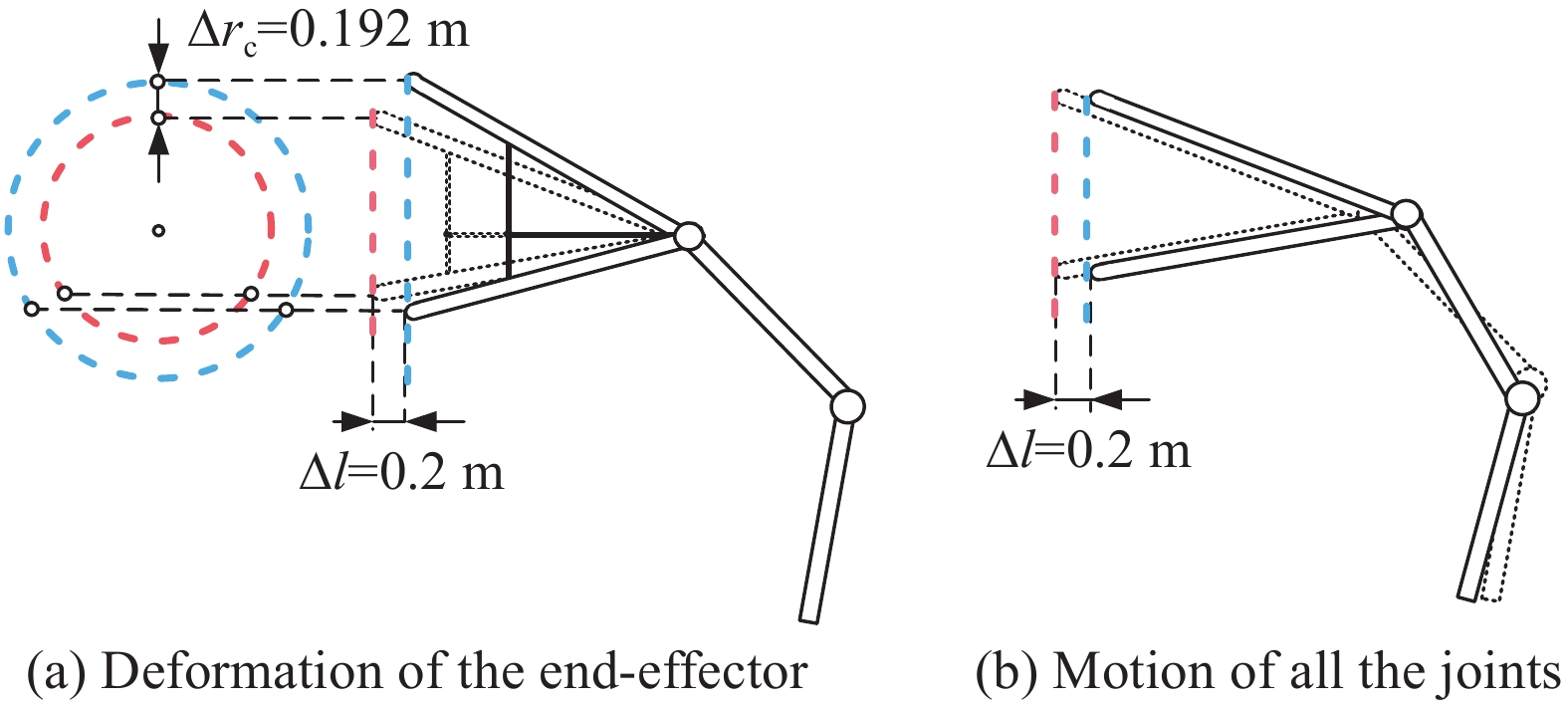
Table 2
Parameters of the robotic arm links"
| Item | Linear density/(kg/m) | Length/m | Sj/(kg·m2) | Ij/(kg·m2) |
| Value | 5 | l1=0.8 | S1=[1.6;0;0] | I1=diag([0.0012 0.853 0.853]) |
| l2=2.5 | S2=[15.625;0;0] | I2=diag([0.0038 26.042 26.042]) | ||
| l3=2 | S3=[10;0;0] | I3=diag([0.0031 13.33 13.33]) | ||
| l4=1 | S4=[2.5;0;0] | I4=diag([0.0015 1.667 1.667]) |
Table 3
Deformation task requirement of the effector and the arm joints"
| Item | Value |
| Initial position of the geometric center of the end tips/m | [6 1.5 0] |
| Final position of the geometric center of the end tips/m | [6 1.7 0] |
| Initial joints configuration/(°) | [16.95 2.28 −37.15 −12.24 −5.07 8.18 −64.26] |
| Initial xc/m | 0.3464 (θp0 = 30.29 °) |
| Demand deformation of xc/m | |
| Demand deformation of joints/(°) | [1.9 −0.02 0.06 0.07 −0.27 −0.32 −1.93] |

Fig 9
Loop of the detumbling system"

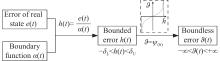
Fig 10
Error transformation diagram"
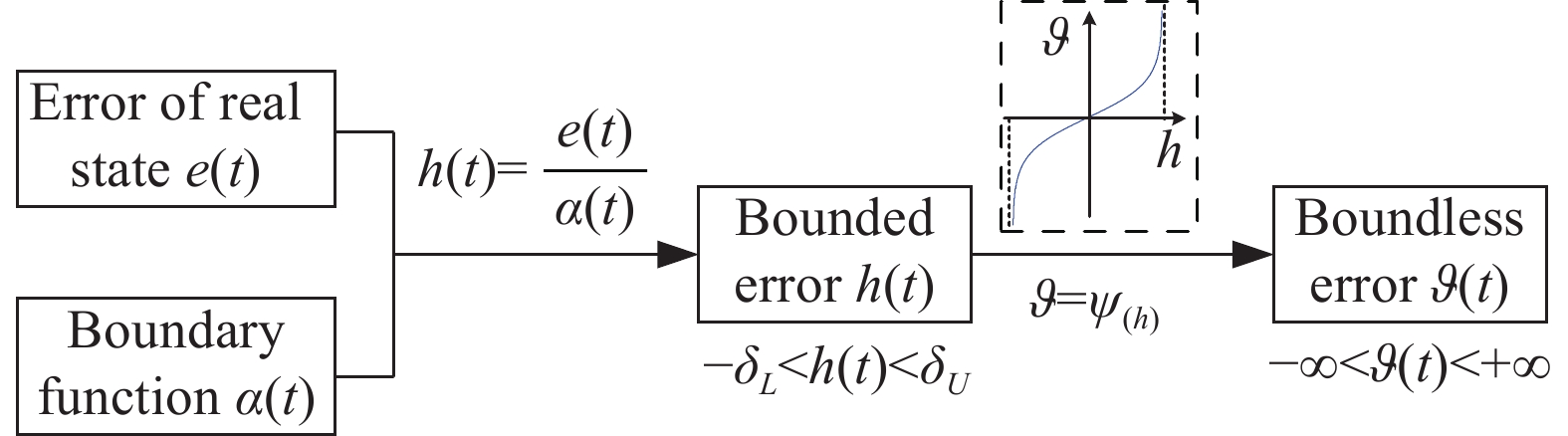
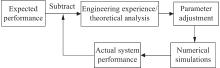
Fig 11
Design process of the controller parameters"
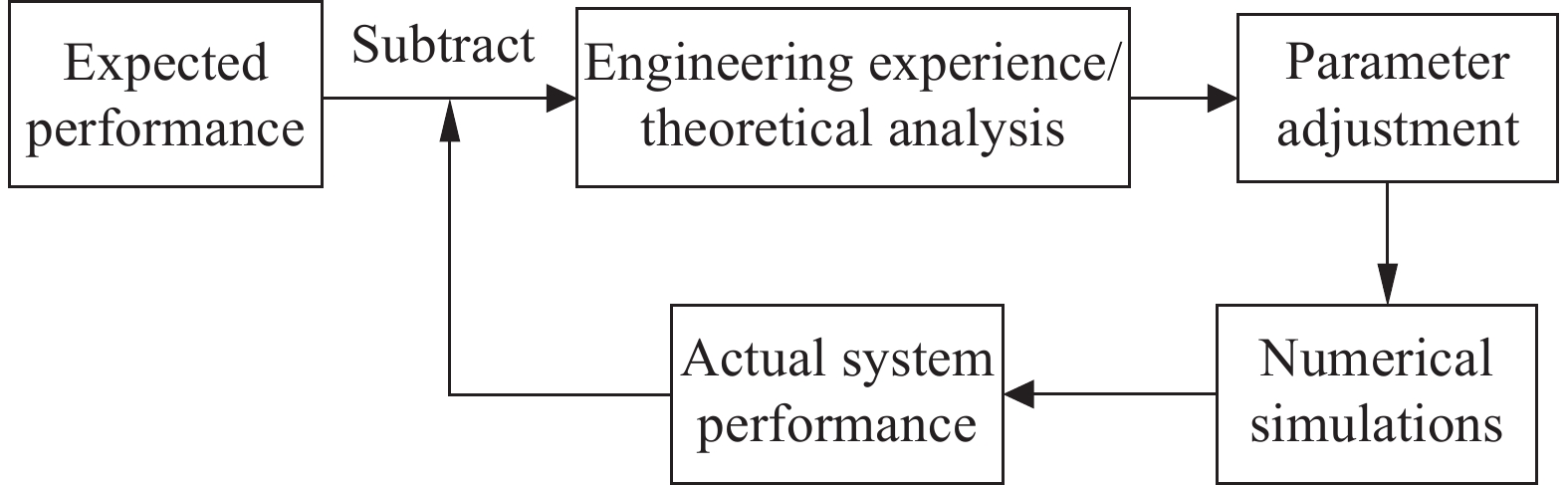
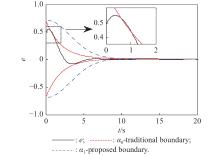
Fig 12
Time-varying boundary"
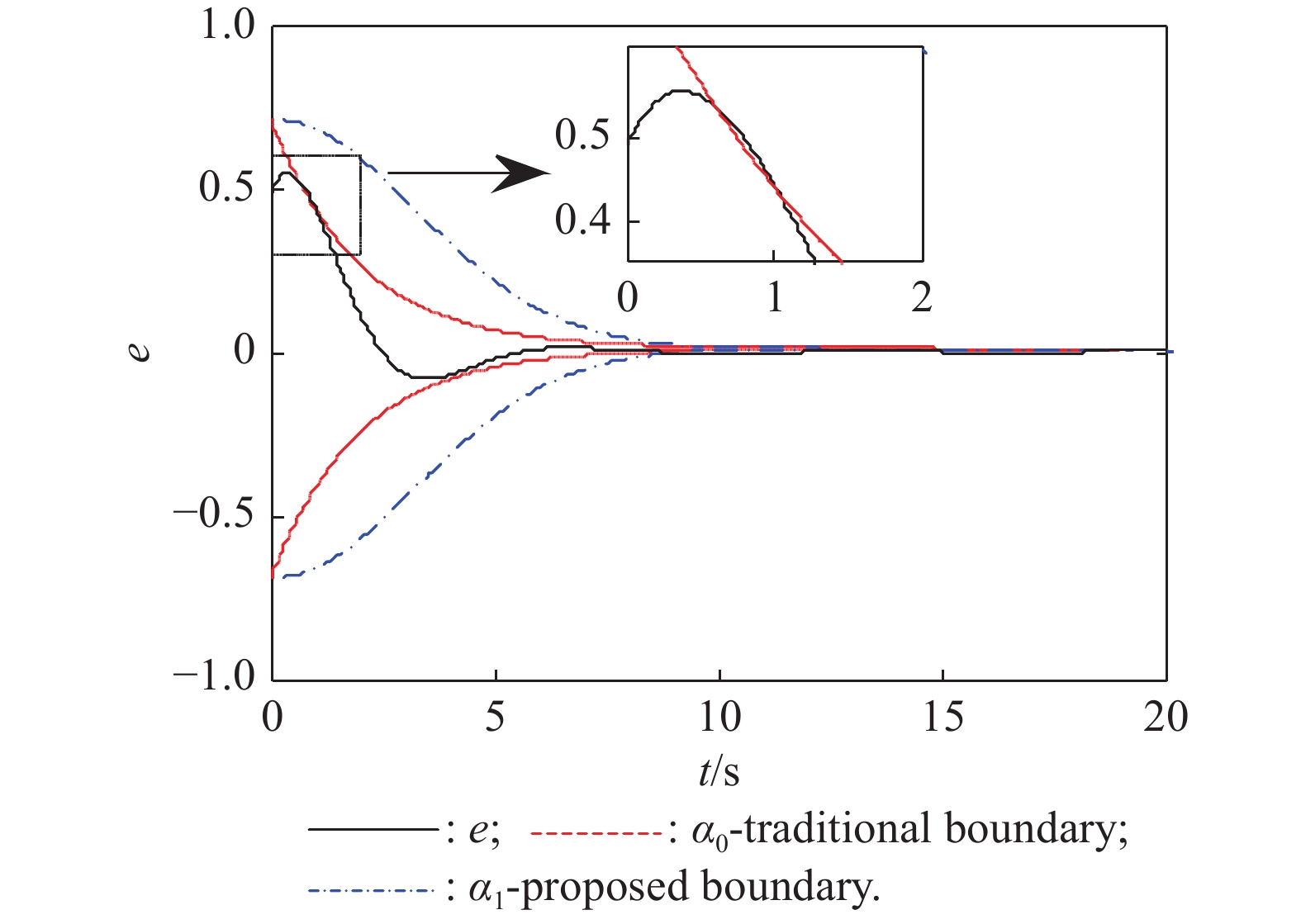
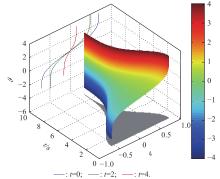
Fig 13
Characters of transformation error"
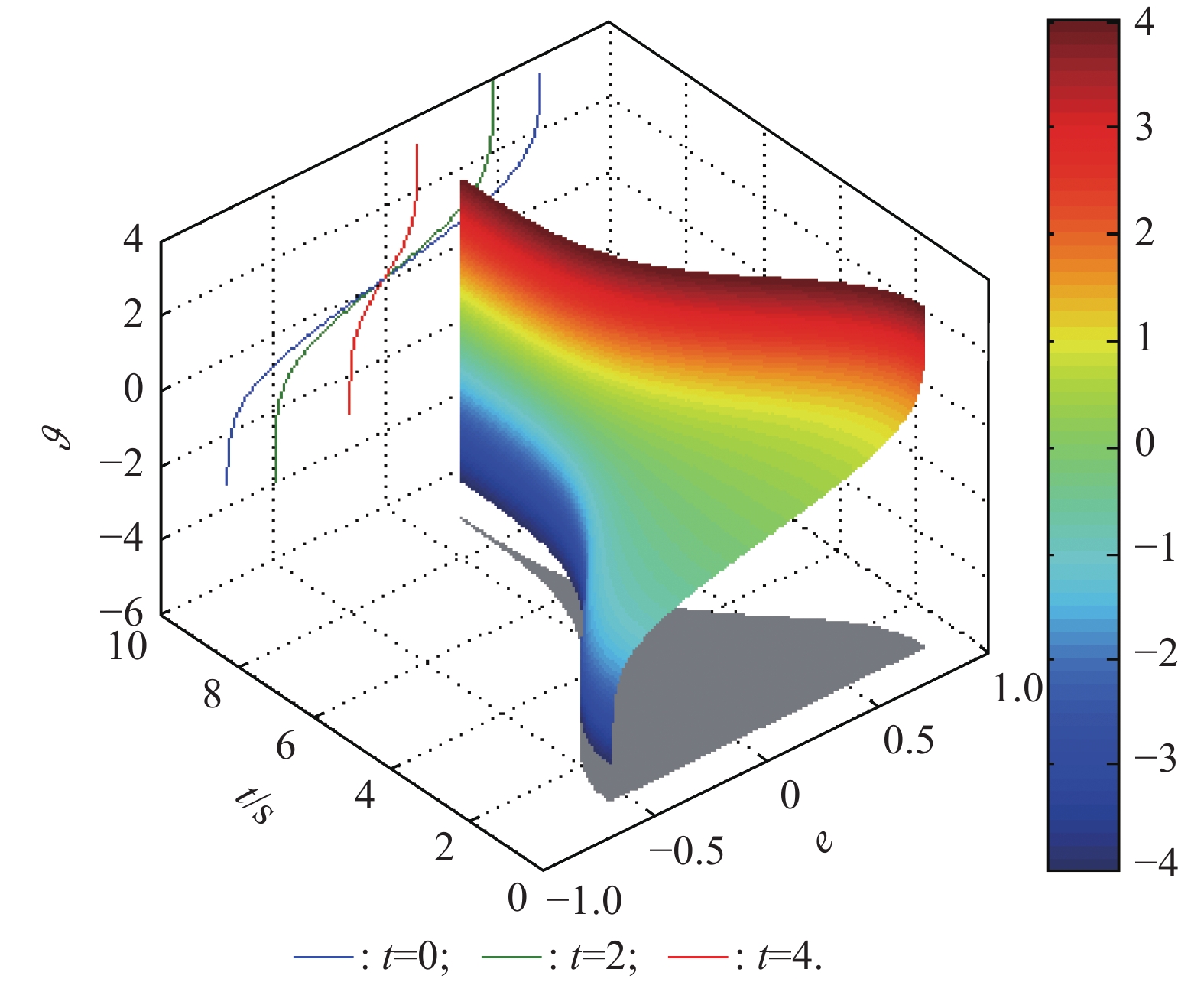

Fig 14
Controller structure"

Table 4
Simulation parameters"
| Item | Value |
| SMC | |
| PPASMC | |
| Initial state of the target | |
| Initial state of the end-effector | xc=0.1 m |
| Desired state of the end-effector | xc=0.17 m |
| Impedance parameters of the deformable end-effectors | [10 15 10] |
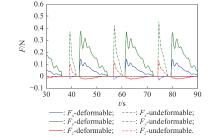
Fig 15
Contact forces of one contact point"

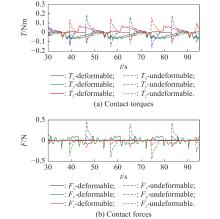
Fig 16
Contact torques and forces to the target"


Fig 17
Control outputs of the sphere joint of arm 1"
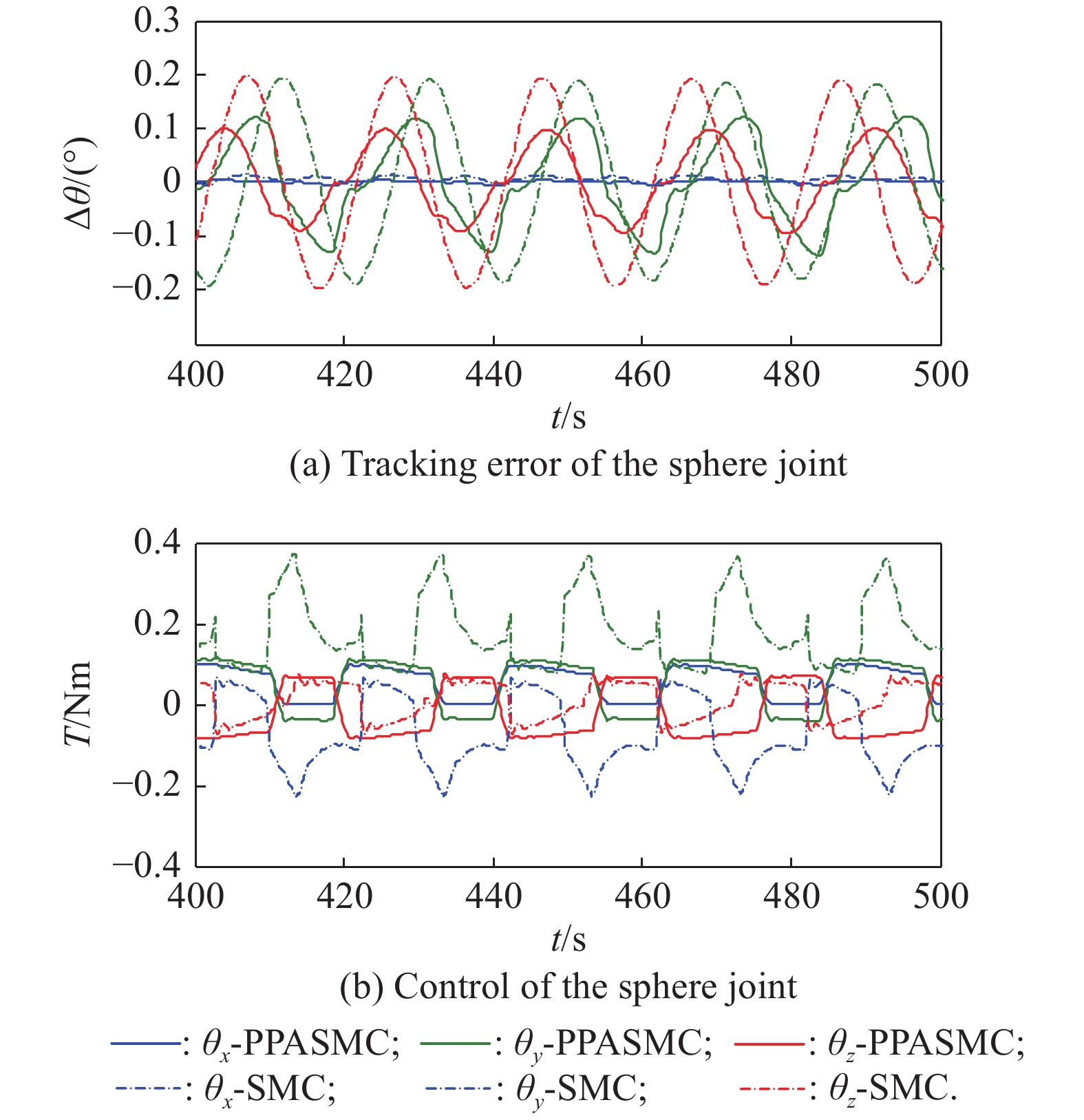
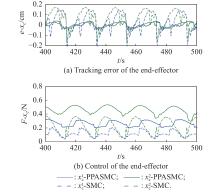
Fig 18
Tracking error of the end-effectors"
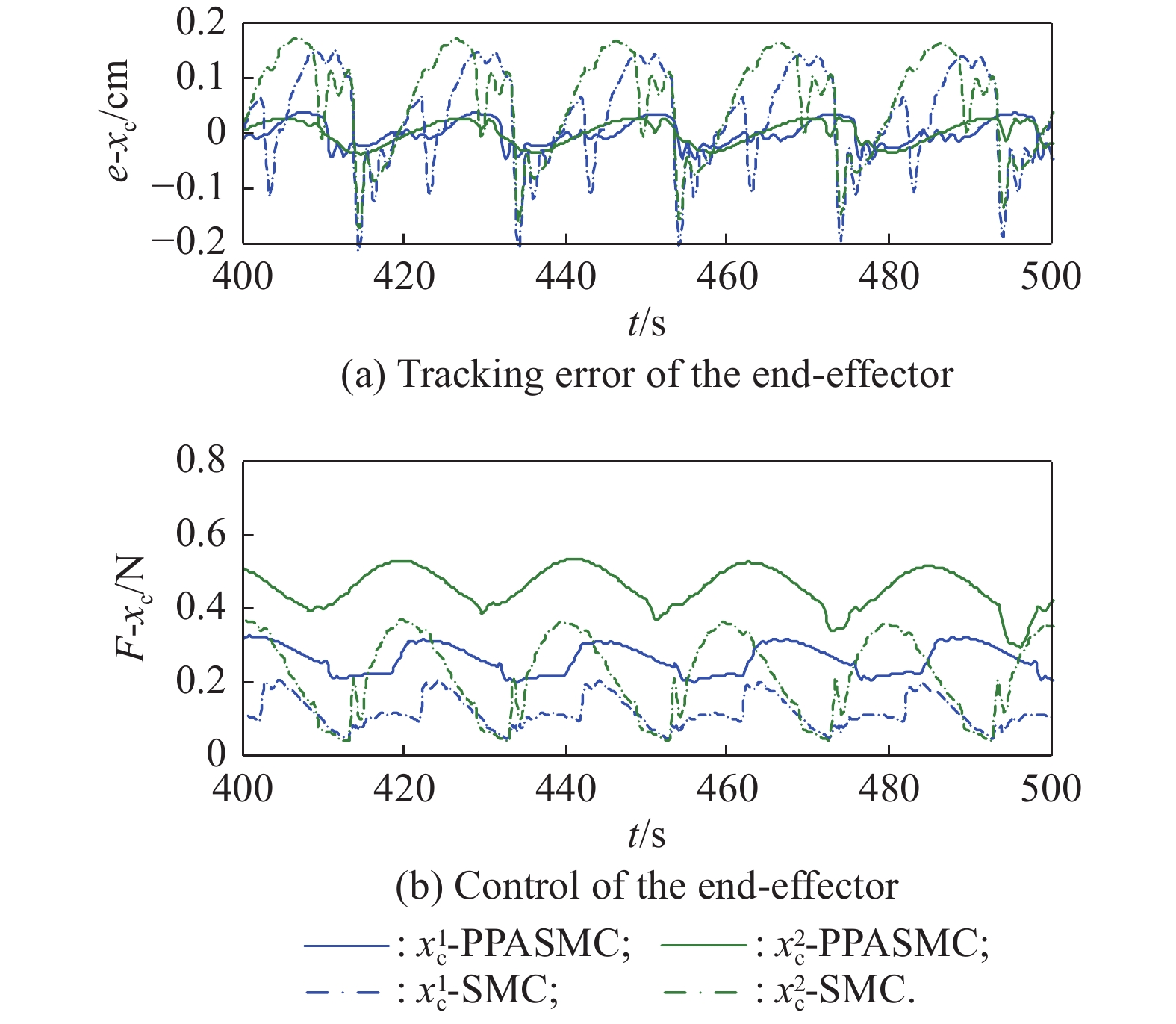
Fig 19
Distance between the contact points and the target surface"
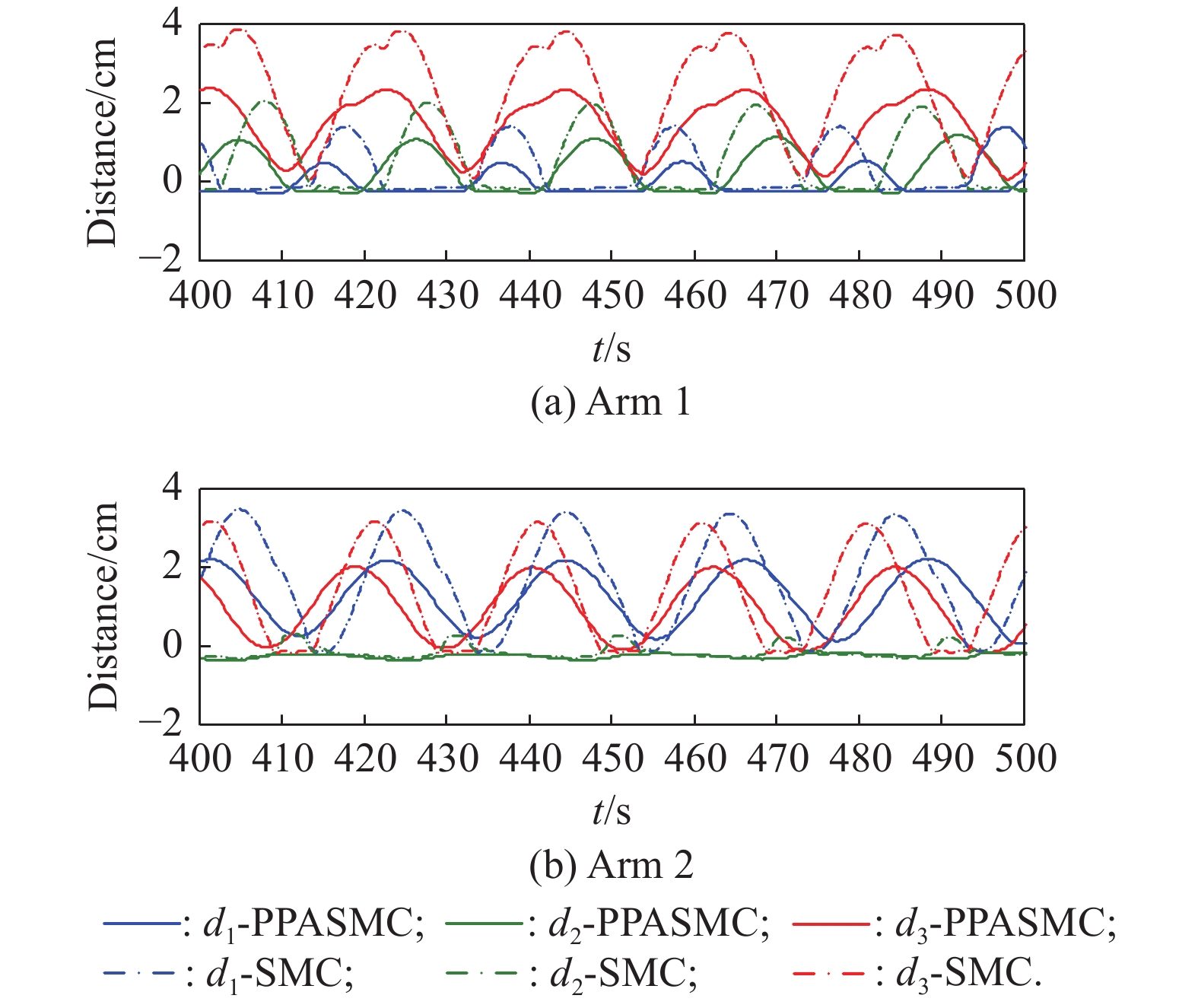
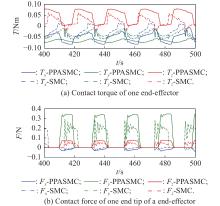
Fig 20
Contact forces and torques"

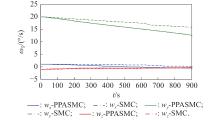
Fig 21
Angular velocity of the target"
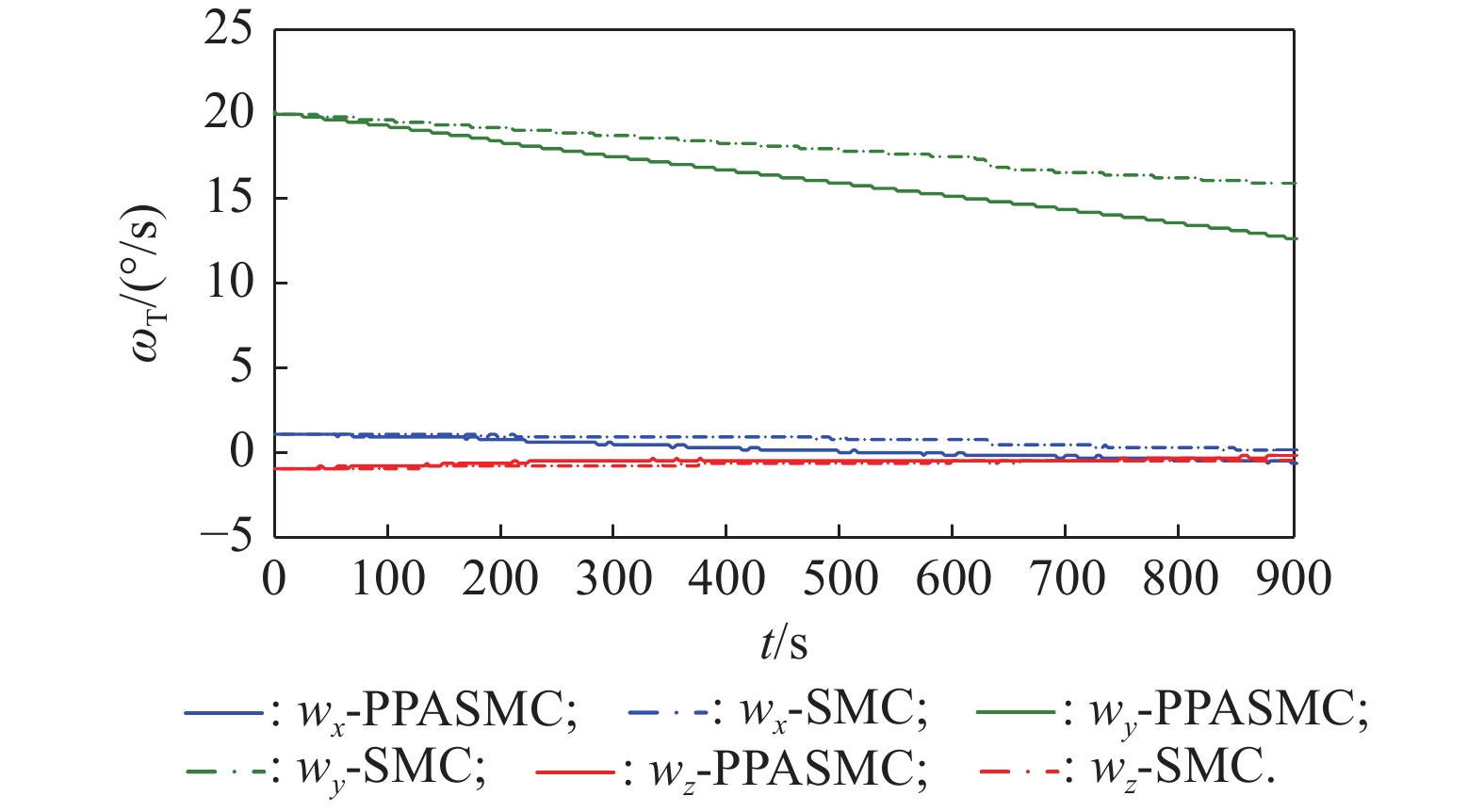
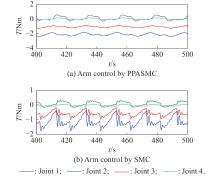
Fig 22
Control outputs of joint 1?joint 4 of arm 1"

Table 5
Simulation results of the approaching"
| Parameter | Simulation 1 | Simulation 2 |
| PPSMC | SMC | |
| Angular accerleration of target/(°/s2) | −0.0177 | −0.0101 |
| Variation range of the target displacement/m | 0.0083 | 0.0247 |
| Average value of the normal contact force of one end-effector/N | ||
| Average value of the resultant force and torque acting on the target/(N/Nm) | ||
| Average tracking error of the arm joints/(°) | [0.026 0.022 0.014 0.007 0.003 0.093 0.093] | [0.183 0.038 0.090 0.009 0.006 0.109 0.109] |
| Variation range of the distance between the end tips and the surface center/m | 0.062 | 0.075 |
| 1 | SHAN M H, GUO J, GILL E Review and comparison of active space debris capturing and removal methods. Progress in Aerospace Sciences, 2016, 80, 18- 32. |
| 2 | SHEN D, LIU J Analysis of the effectiveness of launch traffic model to the space debris environment. Chinese Journal of Space Science, 2020, 40 (3): 349- 356. |
| 3 | HAKIMA H, EMAMI M R. Adaptive detumbling controller for deorbiter cubesat. Proc. of the IEEE Aerospace Conference, 2020. DOI: 10.1109/AERO47225.2020.9172727. |
| 4 | LIU X G, LU Y, ZHANG Q, et al An application of eddy current effect on the active detumble of uncontrolled satellite with tilt air gap. IEEE Trans. on Magnetics, 2019, 55 (12): 1- 11. |
| 5 | LI M, ZHANG Y, ZHANG J R, et al Detumbling method for uncontrolled satellite based on eddy currents. Journal of Guidance, Control, and Dynamics, 2020, 43 (8): 1444- 1455. |
| 6 | XU W F, YAN L, HU Z H, et al Area-oriented coordinated trajectory planning of dual-arm space robot for capturing a tumbling target. Chinese Journal of Aeronautics, 2019, 32 (9): 2151- 2163. |
| 7 | CHEN G, WANG Y Q, WANG Y F, et al Detumbling strategy based on friction control of dual-arm space robot for capturing tumbling target. Chinese Journal of Aeronautics, 2020, 33 (3): 1093- 1106. |
| 8 | ZANG Y, ZHANG Y, ZHANG J R, et al Multipoint contact dynamics and the detumbling strategy for a fast-tumbling target. IEEE Trans. on Aerospace and Electronic Systems, 2019, 56 (4): 3113- 3122. |
| 9 | LIU Y Q, YU Z W, LIU X F, et al Active detumbling technology for high dynamic non-cooperative space targets. Multibody System Dynamics, 2019, 47 (1): 21- 41. |
| 10 | WANG X L, ZHOU Z C, CHEN Y J, et al Optimal contact control for space debris detumbling and nutation damping. Advances in Space Research, 2020, 66 (4): 951- 962. |
| 11 | WU S, MOU F L, LIU Q, et al Contact dynamics and control of a space robot capturing a tumbling object. Acta Astronautica, 2018, 151 (10): 532- 542. |
| 12 | ONO A, YOKOYAMA K. Laminated-type multi-joint portion drive mechanism and manufacturing method therefor, grasping hand and robot arm provided with the same. The United States: US 2006/0028041 A1, 2006. |
| 13 | HAN F, SUN K, LIU Y, et al Design, testing and evaluation of an end-effector for self-relocation. Robotica, 2016, 34 (12): 2689- 2728. |
| 14 | YOSHIDA K, NAKANISHI H. The TAKO (target collaborativize) flyer: a new concept for future satellite servicing. RYCROFT M, CROSBY N, ed. Smaller Satellites: Bigger Business?: 397–399. |
| 15 | PUNNING A, KRUUSMAA M, AABLOO A Surface resistance experiments with IPMC sensors and actuators. Sensors & Actuators A Physical, 2007, 133 (1): 200- 209. |
| 16 | FENG F, LIU Y W, LIU H, et al Design schemes and comparison research of the end-effector of large space manipulator. Chinese Journal of Mechanical Engineering, 2012, 56 (4): 674- 687. |
| 17 | ZHU M M, XIAO S, YU F Torque estimation for robotic joint with harmonic drive transmission based on system dynamic characteristics. Journal of Systems Engineering and Electronics, 2022, 33 (6): 1320- 1331. |
| 18 | GE D M, SUN G H, ZOU Y J, et al Impedance control of multi-arm space robot for the capture of non-cooperative targets. Journal of Systems Engineering and Electronics, 2020, 31 (5): 1051- 1061. |
| 19 | WANG X Y, SHI L L, KATUPITIYA J A strategy to decelerate and capture a spinning object by a dual-arm space robot. Aerospace Science and Technology, 2021, 113, 106682. |
| 20 | LIU X F, ZHANG X Y, CAI G P, et al A collision control strategy for detumbling a non-cooperative spacecraft by a robotic arm. Multibody System Dynamics, 2021, 53, 225- 255. |
| 21 | ZONG L J, LUO J J, WANG M M Optimal detumbling trajectory generation and coordinated control after space manipulator capturing tumbling targets. Aerospace Science and Technology, 2021, 112, 106626. |
| 22 | BECHLIOULIS C P, ROVITHAKIS G A Robust adaptive control of feedback linearizable mimo nonlinear systems with prescribed performance. IEEE Trans. on Automatic Control, 2008, 53 (9): 2090- 2099. |
| 23 | XIA K W, ZOU Y Neuroadaptive saturated control for relative motion based noncooperative spacecraft proximity with prescribed performance. Acta Astronautica, 2021, 180, 361- 369. |
| 24 | YU Z Q, ZHANG Y M, JIANG B. PID-type fault-tolerant prescribed performance control of fixed-wing UAV. Journal of Systems Engineering and Electronics, 2021, 32 (5): 1053−1061. |
| 25 | LIU L X, YAO W, GUO Y Prescribed performance tracking control of a free-flying flexible-joint space robot with disturbances under input saturation. Journal of the Franklin Institute, 2021, 358 (9): 4571- 4601. |
| 26 | ZHENG S P, NIU X J, PENG C H Adaptive super-twisting-tike sliding mode control with prescribed performance for robot manipulators. Journal of Mechanics in Medicine and Biology, 2019, 19 (8): 1940053. |
| 27 | WEI C S, LUO J J, DAI H H, et al Learning-based adaptive prescribed performance control of postcapture space robot-target combination without inertia identifications. Acta Astronautica, 2018, 146, 228- 242. |
| 28 | KANE T R, LEVINSON D A. Dynamics: theory and applications. New York: McGraw-Hill, 1985. |
| 29 | TARN T J, SHOULTS G A, YANG S P A dynamic model of an underwater vehicle with a robotic manipulator using Kane’s method. Autonomous Robots, 1996, 3, 269- 283. |
| 30 | HU Q, ZHANG J R Maneuver and vibration control of flexible manipulators using variable-speed control moment gyros. Acta Astronautica, 2015, 113 (8/9): 105- 119. |
| 31 | HOGAN N. Impedance control: an approach to manipulation. 2. implementation. Proc. of the American Control Conference, 1984: 304−313. |
| 32 | CHOI T Y, CHOI B S, SEO K H. Position and compliance control of a pneumatic muscle actuated manipulator for enhanced safety. IEEE Trans. on Control Systems Technology, 2011, 19(4): 832−842. |
| [1] | Dongdong YAO, Xiaofang WANG, Hai LIN, Zhuping WANG. Leader trajectory planning method considering constraints of formation controller [J]. Journal of Systems Engineering and Electronics, 2023, 34(5): 1294-1308. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||