
Journal of Systems Engineering and Electronics ›› 2024, Vol. 35 ›› Issue (2): 473-484.doi: 10.23919/JSEE.2024.000009
• CONTROL THEORY AND APPLICATION • Previous Articles
Guoqing SHI1( ), Boyan ZHANG1(), Jiandong ZHANG1,*(), Qiming YANG1(), Xiaofeng HUANG1(), Jianyao QUE1(), Junwei PU1(), Xiutang GENG2()
), Boyan ZHANG1(), Jiandong ZHANG1,*(), Qiming YANG1(), Xiaofeng HUANG1(), Jianyao QUE1(), Junwei PU1(), Xiutang GENG2()
Received:2022-11-09
Online:2024-04-18
Published:2024-04-18
Contact:
Jiandong ZHANG
E-mail:shiguoqing@nwpu.edu.cn;forgetleft@mail.nwpu.edu.cn;jdzhang@nwpu.edu.cn;yangqm@nwpu.edu.cn;huangxf@mail.nwpu.edu.cn;1910717821@qq.com;mychineseheart@163.com;gengxiutang1@126.com
About author:Supported by:Guoqing SHI, Boyan ZHANG, Jiandong ZHANG, Qiming YANG, Xiaofeng HUANG, Jianyao QUE, Junwei PU, Xiutang GENG. Manipulator tracking technology based on FSRUKF[J]. Journal of Systems Engineering and Electronics, 2024, 35(2): 473-484.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
Fig 1
DOBOT manipulator structure and joint coordinate system"
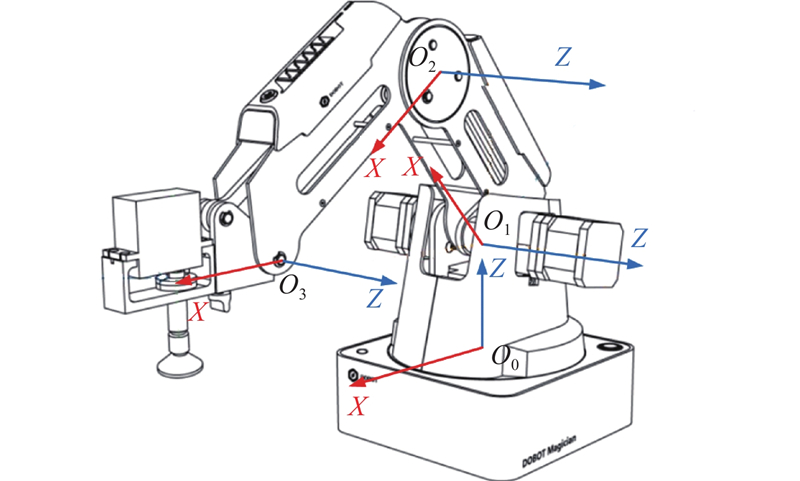
Table 1
DOBOT manipulator D-H parameter table"
| Link serial number | Link rotation angle | Link offset | Link length | Link torsion angle |
| 1 | 138 | 0 | −90 | |
| 2 | 0 | 135 | 0 | |
| 3 | 0 | 147 | 0 | |
| 4 | 0 | 0 | 0 |
Fig 2
Camera imaging model"
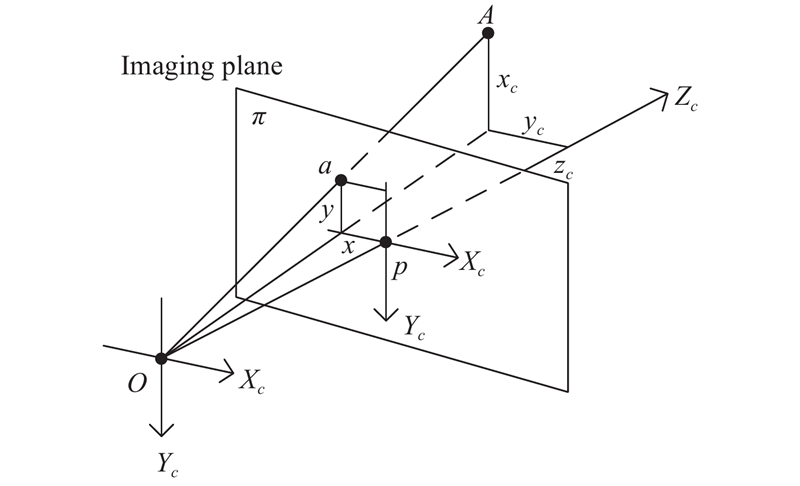
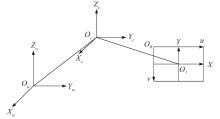
Fig 3
Relationship between coordinate systems"
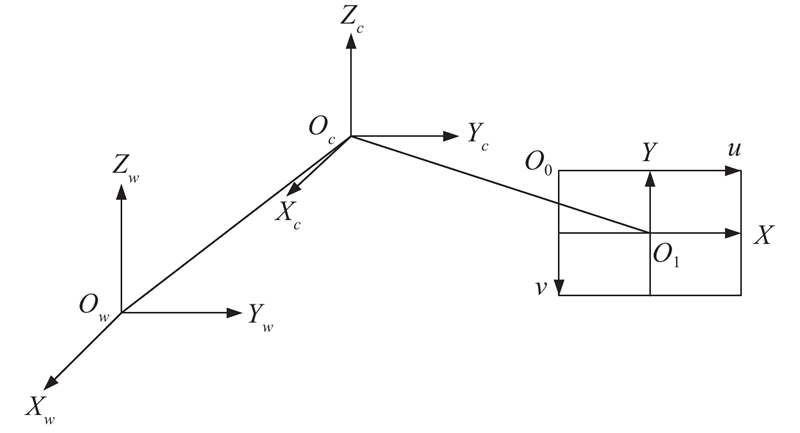
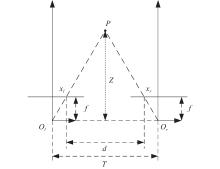
Fig 4
Binocular camera distance measuring principle"


Fig 5
Fuzzy inference system structure"
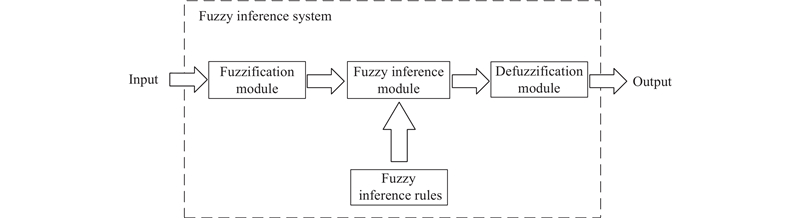
Table 2
Input fuzzy subset interval and fuzzy division"
| Input | Fuzzy division |
| [0,0.96] | LESS |
| [0.5,1.5] | EQUAL |
| [1.06,Inf] | MORE |
Table 3
Output fuzzy subset interval and fuzzy division"
| Output | Fuzzy division |
| [0,0.98] | DECREASE |
| [0.6,1.4] | UNCHANGE |
| [1.02,Inf] | INCREASE |
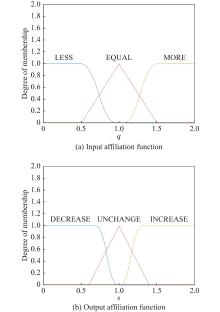
Fig 6
Fuzzy system input and output affiliation function"
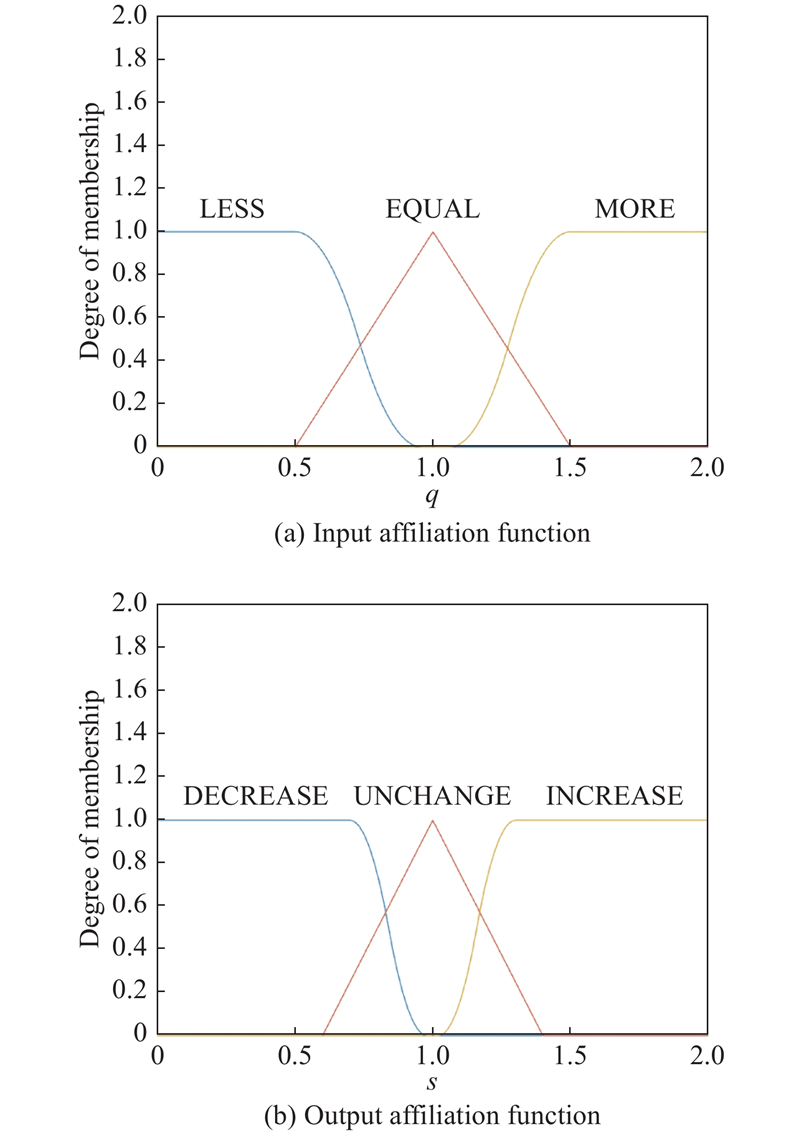
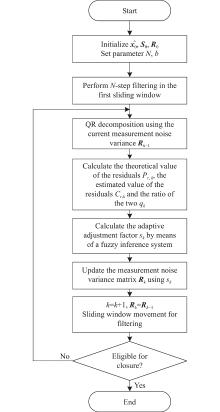
Fig 7
FSRUKF algorithm flow"
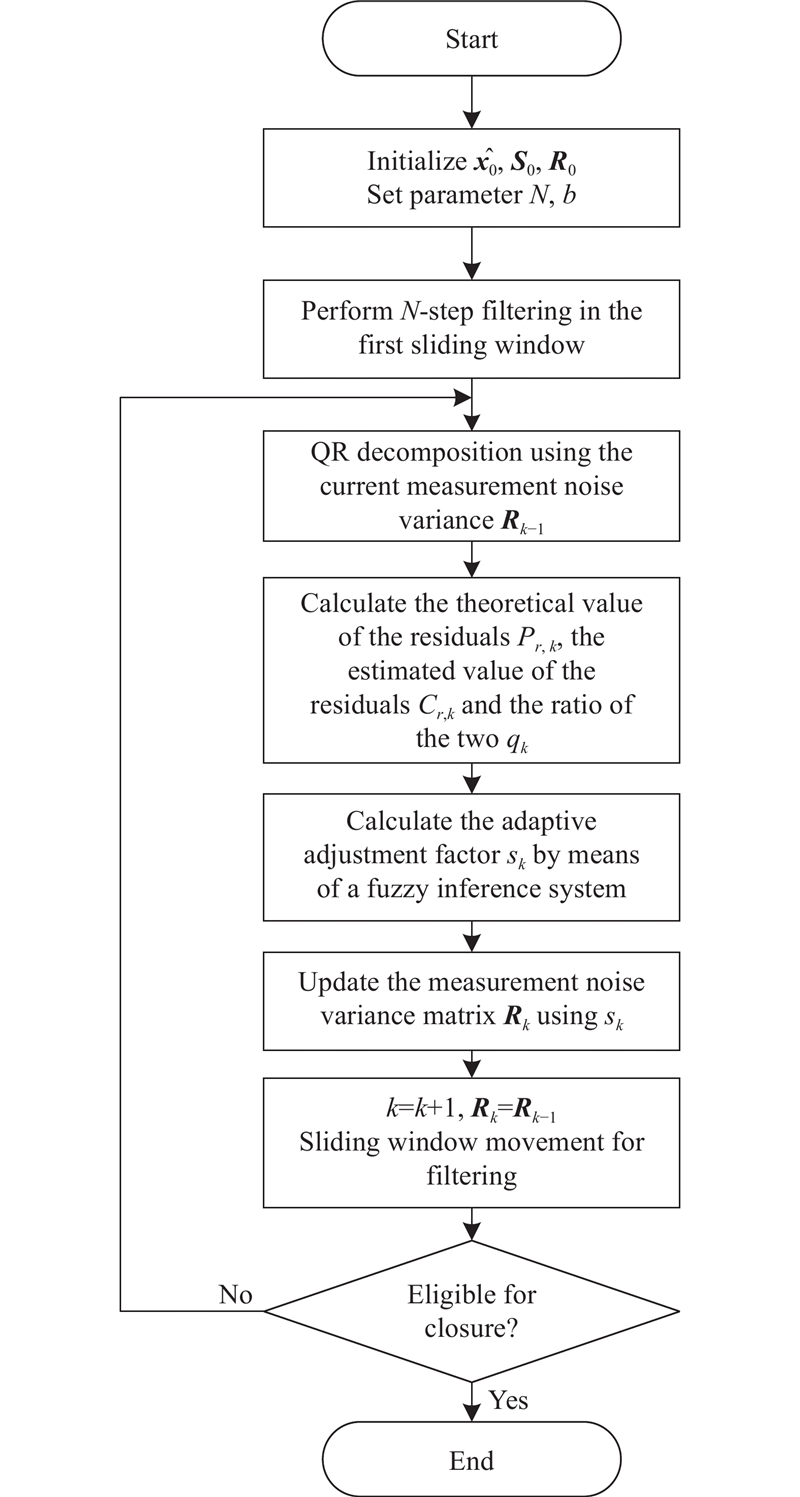
Fig 8
Result of filtering estimation"
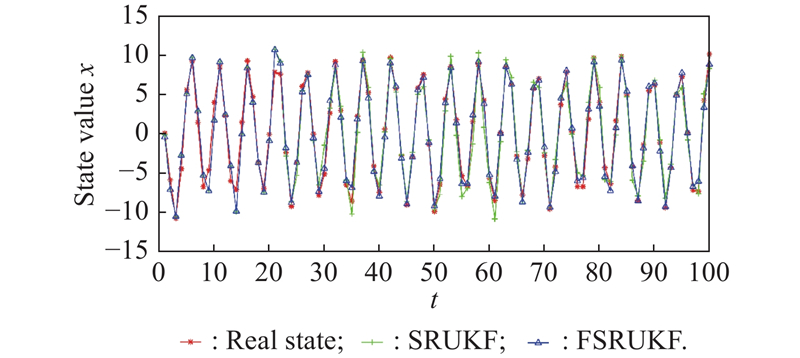
Fig 9
Absolute error of estimation"
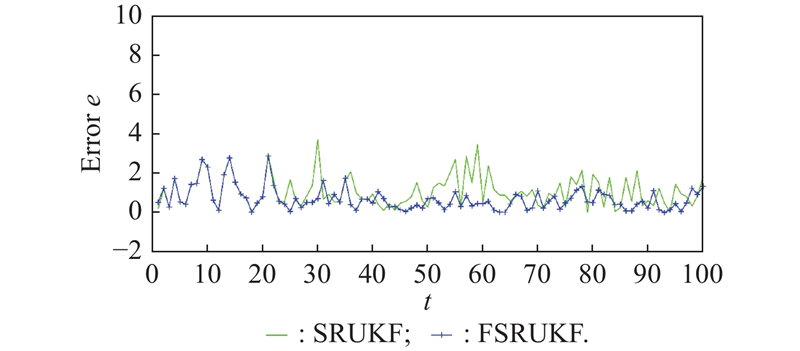
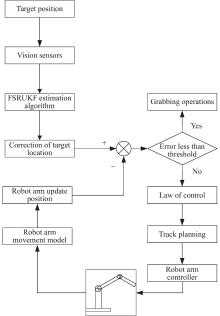
Fig 10
Block diagram of position-based visual servo grasping system"
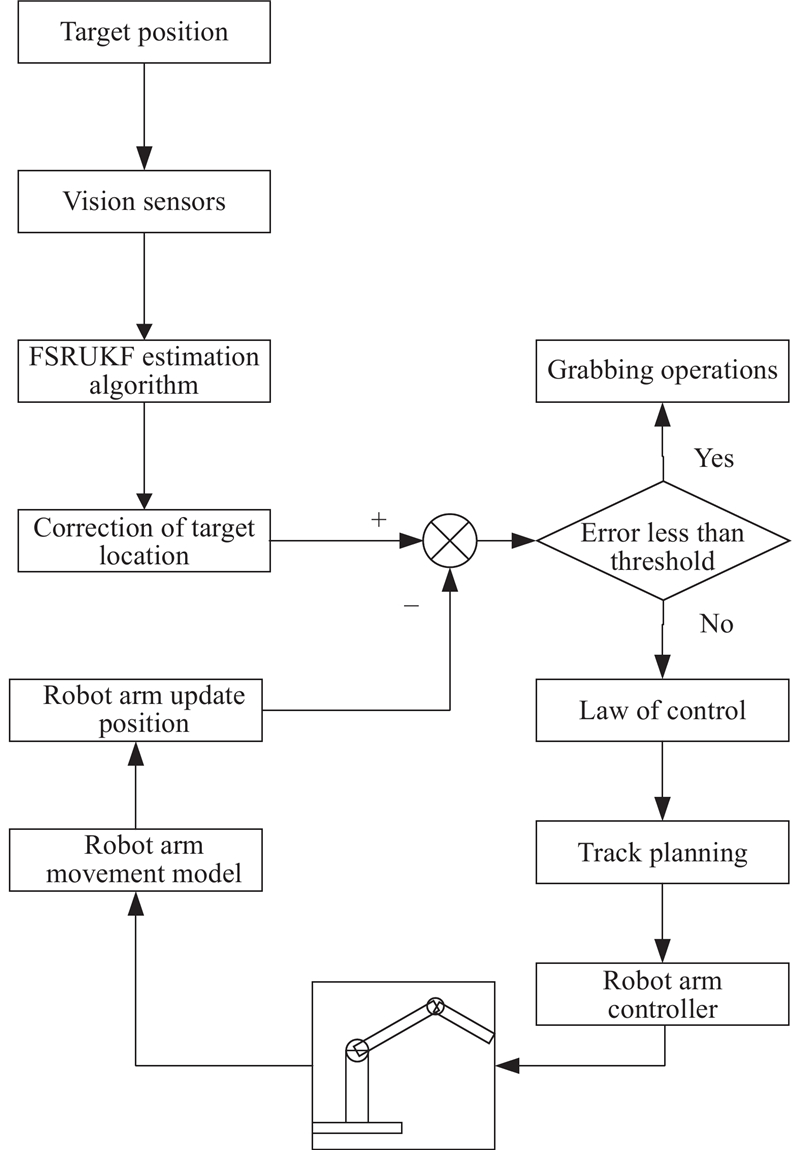
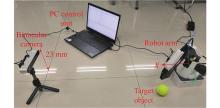
Fig 11
Grabbing system experiment platform"
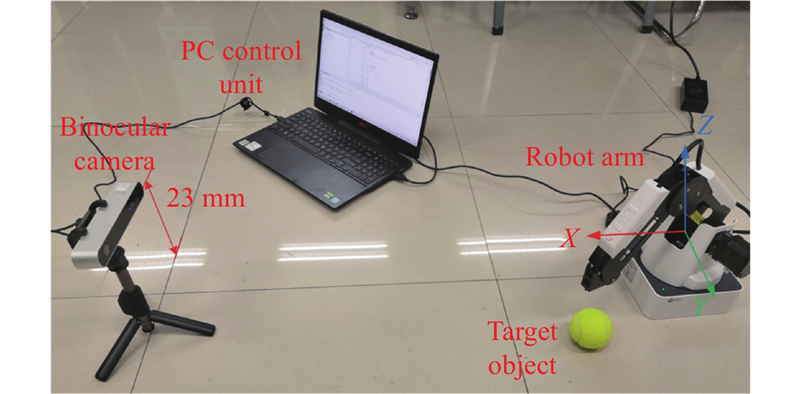

Fig 12
Target direction"

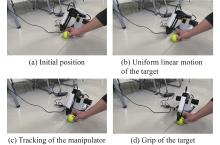
Fig 13
Tracking crawling effect at a constant speed"
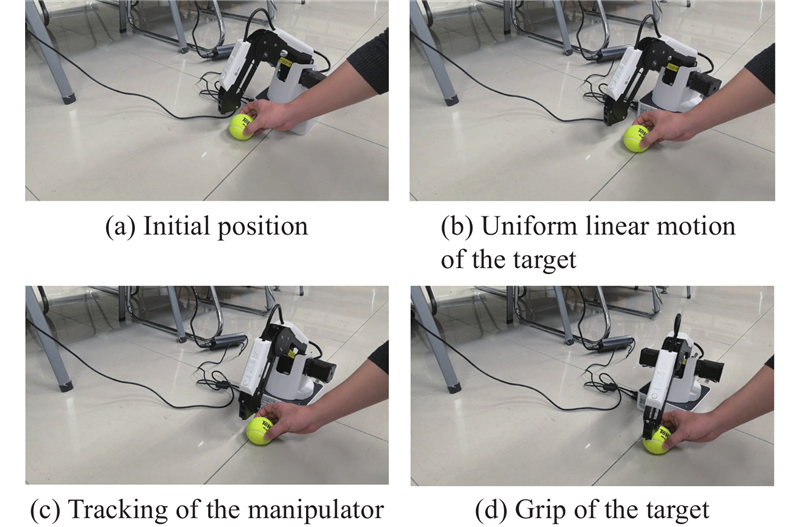
Table 4
Tracking and crawling results without sudden changes in speed"
| Algorithm | Number of experiments | Number of successful crawls/% | Success rate | Average tracking time/s |
| FSRUKF | 20 | 17 | 85.00 | 0.74 |
| SRUKF | 20 | 15 | 75.00 | 0.91 |

Fig 14
Tracking crawling effect with sudden changes in speed"
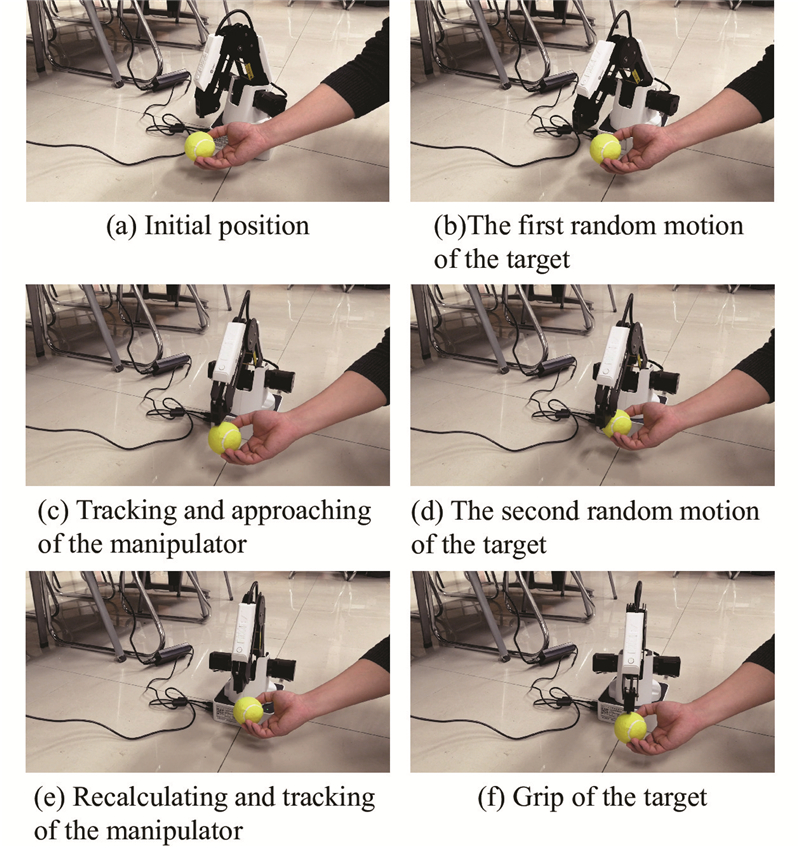
Table 5
Tracking and capturing results of sudden changes in speed"
| Algorithm | Number of experiments | Number of successful crawls | Success rate/% | Average tracking time/s |
| FSRUKF | 20 | 12 | 60.00 | 3.27 |
| SRUKF | 20 | 8 | 40.00 | 3.86 |
| 1 | LIU X J, YU J J, WANG G B, et al Research trend and scientific challenge of robotics. Bulletin of National Natural Science Foundation of China, 2016, 30 (5): 425- 431. |
| 2 |
CARRON A, ARCARI E, WERMELINGER M, et al Data-driven model predictive control for trajectory tracking with a manipulator. IEEE Robotics and Automation Letters, 2019, 4 (4): 3758- 3765.
doi: 10.1109/LRA.2019.2929987 |
| 3 | CHEN L, YANG H W, LIU P. Intelligent robot arm: vision-based dynamic measurement system for industrial applications. Proc. of the 12th International Conference on Intelligent Robotics and Applications, 2019: 120−130. |
| 4 |
KALMAN R E A new approach to linear filtering and prediction problems. Journal of Basic Engineering, 1960, 82 (1): 35- 45.
doi: 10.1115/1.3662552 |
| 5 | MCGEE L A, SCHMIDT S F. Discovery of the Kalman filter as a practical tool for aerospace and industry. California: National Aeronautics and Space Administration, 1985. |
| 6 | DIVYA K S, RAMESH K S, RAO S K, et al. Underwater object tracking using unscented Kalman filter. Proc. of the 3rd International Conference on Advances in Computing, Communication Control and Networking, 2021: 1729−1733. |
| 7 | SETOODEH P, HABIBI S, HAYKIN S. Particle filter in nonlinear filters: theory and applications. Hoboken: Wiley, 2022. |
| 8 |
MOHAMMED M Q, CHUNG K L, CHYI C S Review of deep reinforcement learning-based object grasping: techniques, open challenges, and recommendations. IEEE Access, 2020, 8, 178450- 178481.
doi: 10.1109/ACCESS.2020.3027923 |
| 9 | FRESE U, BAUML B, HAIDACHER S, et al. Off-the-shelf vision for a robotic ball catcher. Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2001: 1623−1629. |
| 10 | KANG J, ZHENG R Parabolic method of robot capture trajectory unknown based on EKF. Transducer and Microsystem Technologies, 2020, 39 (1): 13- 17. |
| 11 | PAING M S, WILLIAM NSHAMA E, UCHIYAMA N. Motion trajectory estimation of a flying object and optimal reduced impact catching by a planar manipulator. Proc. of the IEEE 29th International Conference on Robot and Human Interactive Communication, 2020: 920−925. |
| 12 | CHEN Y, LIU Y. Improved unscented Kalman filtering algorithm applied to on-vehicle tracking system. Proc. of the International Conference on Computer, Internet of Things and Control Engineering, 2021: 64−68. |
| 13 | XU Y B, XU K, WAN J W, et al. Research on particle filter tracking method based on Kalman filter. Proc. of the IEEE 2nd Advanced Information Management, Communicates, Electronic and Automation Control Conference, 2018: 1564−1568. |
| 14 |
GONG Z Y, QIU C R, TAO B, et al Tracking and grasping of moving target based on accelerated geometric particle filter on colored image. Science China Technological Sciences, 2021, 64 (4): 755- 766.
doi: 10.1007/s11431-020-1688-2 |
| 15 |
KIM S, SHUKLA A, BILLARD A Catching objects in flight. IEEE Trans. on Robotics, 2014, 30 (5): 1049- 1065.
doi: 10.1109/TRO.2014.2316022 |
| 16 | LUO R C, LIAO C H. Robotic conveyor tracking with dynamic object fetching for industrial automation. Proc. of the IEEE 15th International Conference on Industrial Informatics, 2017: 369−374. |
| 17 |
QU J D, ZHANG F H, TANG Y X, et al Dynamic visual tracking for robot manipulator using adaptive fading Kalman filter. IEEE Access, 2020, 8, 35113- 35126.
doi: 10.1109/ACCESS.2020.2973299 |
| 18 | LI X T, ZHENG Y, SUN T T. Application of an improved and unscented Kalman filtering algorithm in target tracking. Proc. of the Chinese Control and Decision Conference, 2019: 18−22. |
| 19 | ZHANG Y, LIU Z B, BIN Z, et al. A novel adaptive resampling particle filtering algorithm. Proc. of the IEEE International Conference on Computational Science and Engineering and IEEE International Conference on Embedded and Ubiquitous Computing, 2017: 297−300. |
| 20 |
DENAVIT J A kinematic notation for lower-pair mechanisms based on matrices. Journal of Applied Mechanics, 1955, 22 (2): 215- 221.
doi: 10.1115/1.4011045 |
| 21 | GAO B. Research on binocular vision system for industrial robots. Wuhan: Huazhong University of Science & Technology, 2019. (in Chinese) |
| 22 | SUN X Y, JIANG Y Z, JI Y F, et al. Distance measurement system based on binocular stereo vision. Proc. of the IOP Conference Series: Earth and Environmental Science, 2019: 252−260. |
| 23 | Rudolph V D M, ERIC W. Sigma-point Kalman filters for probabilistic inference in dynamic state-space models. Portland: Oregon Health & Science University, 2004. |
| 24 | MERWE R V D, WAN E A. The square-root unscented Kalman filter for state and parameter-estimation. Proc. of the IEEE International Conference on Acoustics, 2002: 3461−3464. |
| [1] | Ya’nan Wang, Yingjie Lei, Yang Lei, Xiaoshi Fan. Multi-factor high-order intuitionistic fuzzy time series forecasting model [J]. Journal of Systems Engineering and Electronics, 2016, 27(5): 1054-1062. |
| [2] | Shi Li and Guangren Duan. Parametric approach to track following control of FFSM [J]. Journal of Systems Engineering and Electronics, 2011, 22(5): 810-815. |
| [3] | Chen Tieming, Gong Rongsheng & Huang Samuel H.. Integrated knowledge-based modeling and its application for classification problems [J]. Journal of Systems Engineering and Electronics, 2008, 19(6): 1277-1282. |
| [4] |
Zhang Yinan , SMTZ Qingwei, Qwan He , Jzw Yonggao & Quan Tax fan.
Uncertain information fusion with robust adaptive neural networks-fuzzy reasoning
[J]. Journal of Systems Engineering and Electronics, 2006, 17(3): 495-501.
|
| [5] | Ban Xiaojun, Gao Xiaozhi, Huang Xianlin & Ww Tianbao. Analysis of one dimensional and two dimensional fuzzy controllers* [J]. Journal of Systems Engineering and Electronics, 2006, 17(2): 362-373. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||