
Journal of Systems Engineering and Electronics ›› 2024, Vol. 35 ›› Issue (2): 259-274.doi: 10.23919/JSEE.2023.000101
• ELECTRONICS TECHNOLOGY •
Guoliang SUN1( ), Shanshan PEI2(), Qian LONG3,*(), Sifa ZHENG4(), Rui YANG5()
), Shanshan PEI2(), Qian LONG3,*(), Sifa ZHENG4(), Rui YANG5()
Received:2022-12-08
Accepted:2023-07-24
Online:2024-04-18
Published:2024-04-18
Contact:
Qian LONG
E-mail:sunguoliang@tsari.tsinghua.edu.cn;pei.shanshan.must@gmail.com;longqian95@gmail.com;icsun@163.com;Yangrui19781230@163.com
About author:Supported by:Guoliang SUN, Shanshan PEI, Qian LONG, Sifa ZHENG, Rui YANG. Disparity estimation for multi-scale multi-sensor fusion[J]. Journal of Systems Engineering and Electronics, 2024, 35(2): 259-274.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks

Fig 1
Data alignment diagram"
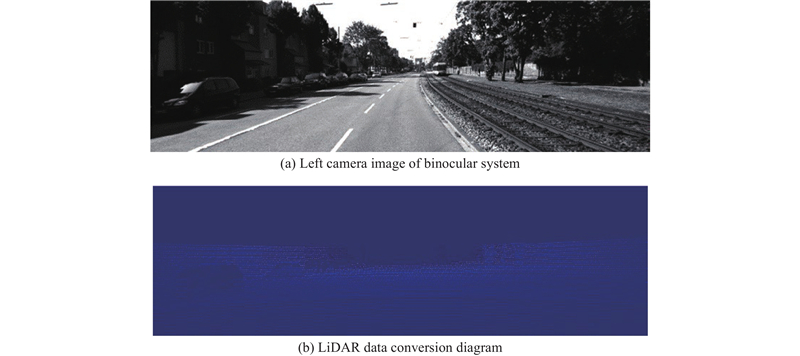
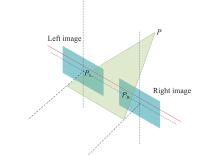
Fig 2
Schematic diagram of the parallel vision model"
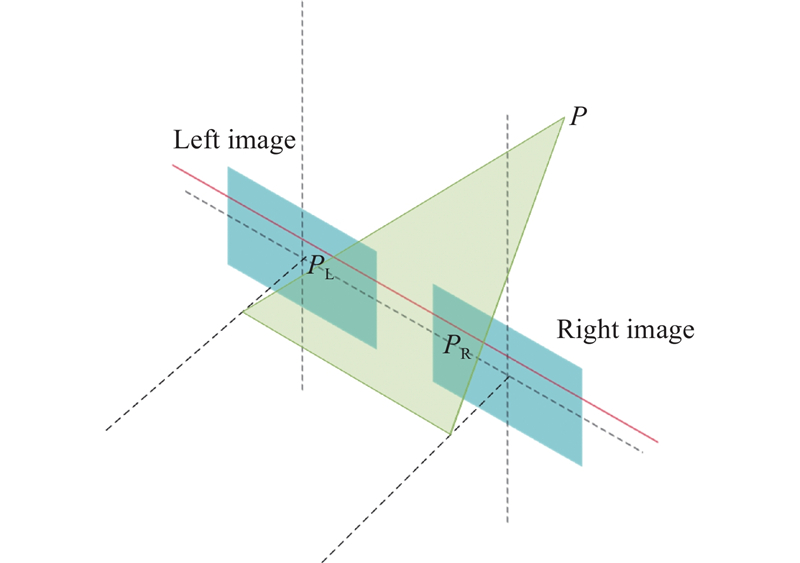

Fig 3
Schematic diagram of the disparity search range"


Fig 4
Matching cost response graph"
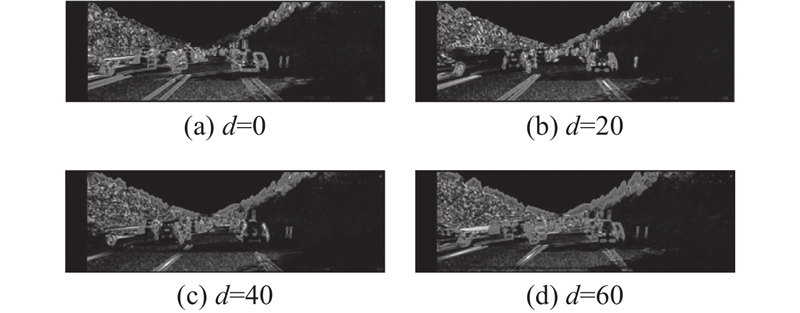

Fig 5
Path diagram"

Fig 6
Feature corresponding diagram"

Fig 7
Disparity calculation"


Fig 8
Stereo matching algorithm framework"
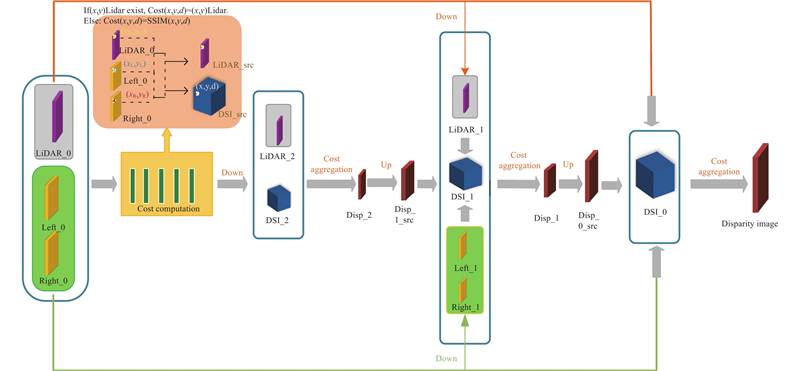

Fig 9
Disparity map effect of some scenes"
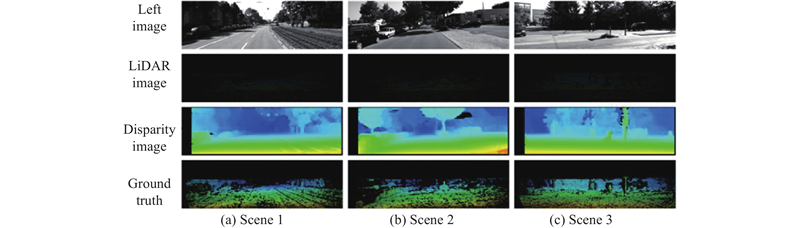
Table 1
Disparity error of SGM+MPV scheme and fusion scheme"
| Method | MAE/px | RMSE/(1/px) | iMAE/px | iRMSE/(1/px) | logMAE/px | logRMSE/px | SILog/% | abs rel./% | sq. rel./% |
| SGM + MPV | 1.2683 | 2.3481 | 0.0020 | 0.0057 | 0.0410 | 0.0752 | 0.0702 | 0.0409 | 0.0089 |
| Proposed method | 0.3988 | 0.9461 | 0.0008 | 0.0025 | 0.0140 | 0.0316 | 0.0313 | 0.0139 | 0.0015 |
Table 2
Disparity accuracy of SGM+MPV scheme and fusion scheme %"
| Method | Accuracy (1 pixel) | Accuracy (3 pixels) | Accuracy (5 pixels) |
| SGM + MPV | 0.5553 | 0.9503 | 0.9715 |
| The proposed method | 0.9436 | 0.9955 | 0.9978 |

Fig 10
Error comparison between SGM+MPV scheme and fusion scheme in multiple scenarios"
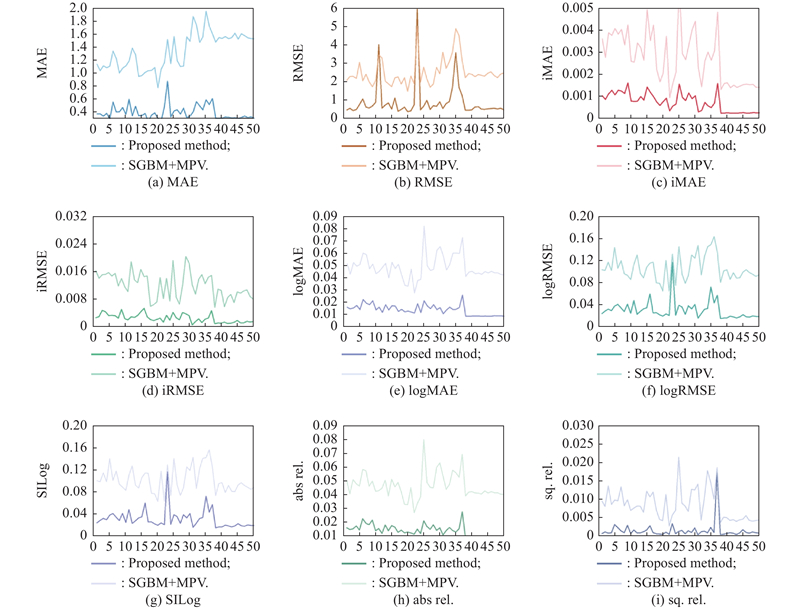
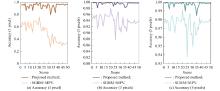
Fig 11
Accuracy comparison of SGM+MPV scheme and fusion scheme in multiple scenes"

Table 3
Disparity error for SGM method and our method %"
| Method | MAE/px | RMSE/(1/px) | iMAE/px | iRMSE/(1/px) | logMAE/px | logRMSE/px | SILog/% | abs rel./% | sq. rel./% |
| SGM | 0.5682 | 1.3843 | 0.0010 | 0.0039 | 0.0196 | 0.0466 | 0.0453 | 0.0193 | 0.0031 |
| Proposed method | 0.3988 | 0.9461 | 0.0008 | 0.0025 | 0.0140 | 0.0316 | 0.0313 | 0.0139 | 0.0015 |
Table 4
Disparity accuracy for SGM method and our method"
| Method | Accuracy (1 pixel) | Accuracy (3 pixels) | Accuracy (5 pixels) |
| SGM | 0.8640 | 0.9905 | 0.9954 |
| Proposed method | 0.9436 | 0.9955 | 0.9978 |

Fig 12
Error comparison between SGM method and our method in multiple scenes"
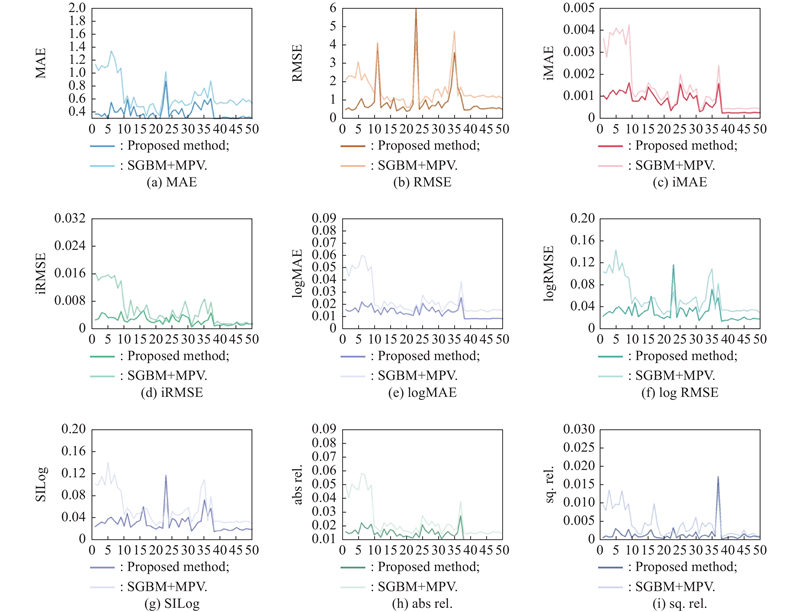
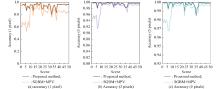
Fig 13
Accuracy comparison of SGM method and our method in multiple scenes"
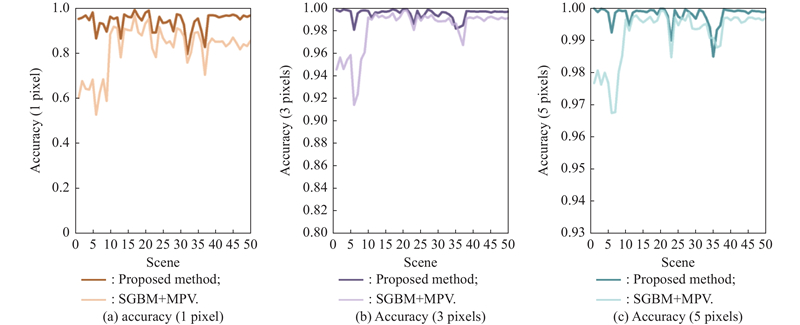
Table 5
Disparity error for different LiDAR data densities"
| Percentage/% | MAE/px | RMSE/(1/px) | iMAE/px | iRMSE/(1/px) | logMAE/px | logRMSE/px | SILog/% | abs rel./% | sq. rel./% |
| 25 | 0.6527 | 1.3681 | 0.0011 | 0.0036 | 0.0217 | 0.0452 | 0.0431 | 0.0216 | 0.0031 |
| 50 | 0.4879 | 1.1371 | 0.0009 | 0.0030 | 0.0166 | 0.0374 | 0.0366 | 0.0165 | 0.0021 |
| 100 | 0.3988 | 0.9461 | 0.0008 | 0.0025 | 0.0140 | 0.0316 | 0.0313 | 0.0139 | 0.0015 |
Table 6
Disparity accuracy for different LiDAR data densities %"
| Percentage | Accuracy (1 pixel) | Accuracy (3 pixels) | Accuracy (5 pixels) |
| 25% | 0.8264 | 0.9872 | 0.9941 |
| 50% | 0.9072 | 0.9927 | 0.9967 |
| 100% | 0.9436 | 0.9955 | 0.9978 |

Fig 14
Error comparison of different LiDAR data density in multiple scenes"
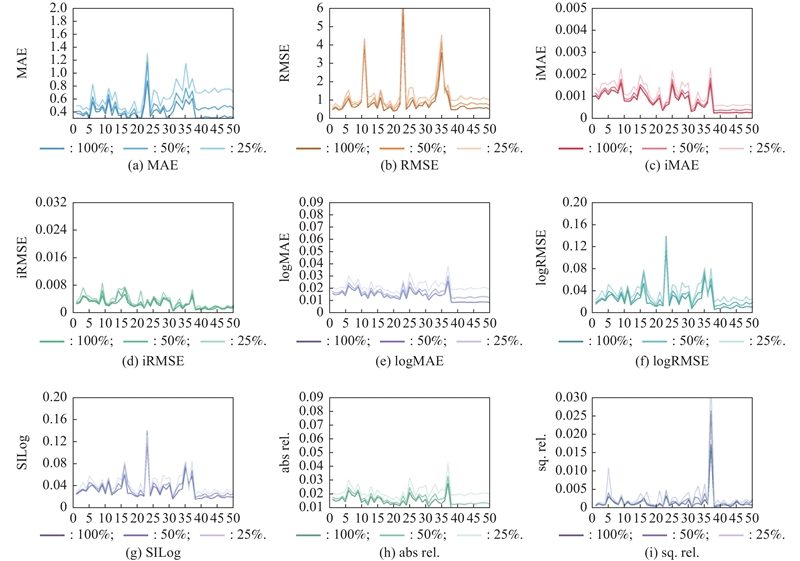
Fig 15
Accuracy comparison of different LiDAR data density in multiple scenes"
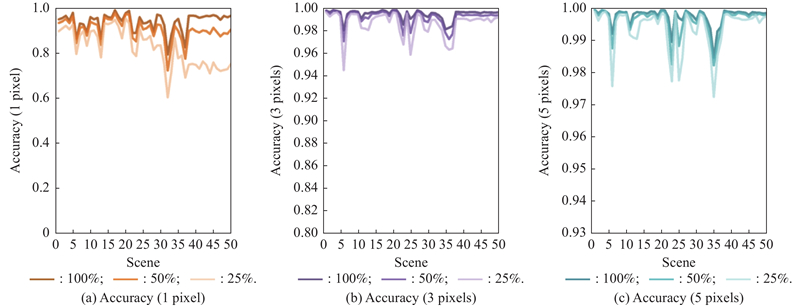
Table 7
Disparity error for different window sizes"
| Size | MAE/px | RMSE/(1/px) | iMAE/px | iRMSE/(1/px) | logMAE/px | logRMSE/px | SILog/% | abs rel./% | sq. rel./% |
| 3×3 | 0.3971 | 0.9277 | 0.0008 | 0.0025 | 0.0139 | 0.0314 | 0.0312 | 0.0139 | 0.0018 |
| 5×5 | 0.4879 | 1.1371 | 0.0009 | 0.0030 | 0.0166 | 0.0374 | 0.0366 | 0.0165 | 0.0021 |
| 7×7 | 0.3988 | 0.9461 | 0.0008 | 0.0025 | 0.0140 | 0.0316 | 0.0313 | 0.0139 | 0.0015 |
Table 8
Disparity accuracy for different window sizes %"
| Size | Accuracy (1 pixel) | Accuracy (3 pixels) | Accuracy (5 pixels) |
| 3×3 | 0.8264 | 0.9872 | 0.9941 |
| 5×5 | 0.9072 | 0.9927 | 0.9967 |
| 7×7 | 0.9436 | 0.9955 | 0.9978 |

Fig 16
Error comparison of different window sizes in multiple scenes"

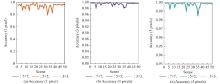
Fig 17
Accuracy comparison of different window sizes in multiple scenes"
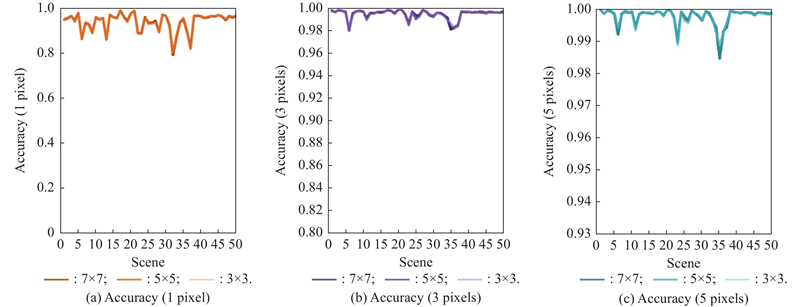
Table 9
Disparity error for different matching"
| Algorithm | MAE/px | RMSE/(1/px) | iMAE/px | iRMSE/(1/px) | logMAE/px | logRMSE/px | SILog/% | abs rel./% | sq. rel./% |
| SSD | 6.7050 | 10.2087 | 0.0159 | 0.0220 | 0.2872 | 0.3817 | 0.3213 | 0.2453 | 0.1199 |
| SSD + LiDAR | 0.4054 | 1.0733 | 0.0008 | 0.0030 | 0.0145 | 0.0389 | 0.0388 | 0.0147 | 0.0029 |
| Census | 1.4817 | 2.7550 | 0.0033 | 0.0725 | 0.0505 | 0.1012 | 0.0963 | 0.0496 | 0.0100 |
| Census + LiDAR | 0.5261 | 1.2520 | 0.0010 | 0.0070 | 0.0178 | 0.0419 | 0.8907 | 0.9853 | 0.9940 |
| SSIM | 1.2683 | 2.3481 | 0.0020 | 0.0057 | 0.0410 | 0.0752 | 0.0702 | 0.0409 | 0.0089 |
| SSIM + LiDAR | 0.3988 | 0.9461 | 0.0008 | 0.0025 | 0.0140 | 0.0316 | 0.0313 | 0.0139 | 0.0015 |
Table 10
Disparity accuracy for different matching cost algorithms %"
| Algorithm | Accuracy (1 pixel) | Accuracy (3 pixels) | Accuracy (5 pixels) |
| SSD | 0.1662 | 0.3955 | 0.5523 |
| SSD + LiDAR | 0.9511 | 0.9903 | 0.9959 |
| Census | 0.5029 | 0.9207 | 0.9594 |
| Census + LiDAR | 0.8907 | 0.9853 | 0.9940 |
| SSIM | 0.5553 | 0.9503 | 0.9715 |
| SSIM + LiDAR | 0.9436 | 0.9955 | 0.9978 |
| 1 | MA C, SUN Z, PEI S S, et al. A road environment prediction system for intelligent vehicle. Wireless Communications and Mobile Computing, 2021. DOI: 10.1155/2021/5569295. |
| 2 |
XIE Q W, LIU R R, SUN Z, et al A flexible free-space detection system based on stereo vision. Neurocomputing, 2022, 485, 252- 262.
doi: 10.1016/j.neucom.2021.05.115 |
| 3 | XU Y Q, JOHN V, MITA S, et al 3D point cloud map based vehicle localization using stereo camera. Proc. of the IEEE Intelligent Vehicles Symposium, 2017, 487- 492. |
| 4 | CHEN L F, YANG Z, MA J J, et al Driving scene perception network: real-time joint detection, depth estimation and semantic segmentation. Proc. of the IEEE Winter Conference on Applications of Computer Vision, 2018, 1283- 1291. |
| 5 |
GAO F, DUAN J L, HAN Z D, et al Automatic virtual test technology for intelligent driving systems considering both coverage and efficiency. IEEE Trans. on Vehicular Technology, 2020, 69 (12): 14365- 14376.
doi: 10.1109/TVT.2020.3033565 |
| 6 |
JOHN V, MITA S Deep feature-level sensor fusion using skip connections for real-time object detection in autonomous driving. Electronics, 2021, 10 (4): 424.
doi: 10.3390/electronics10040424 |
| 7 | DURAND S, BENMOKHTAR R, PERROTTON X. 360 multisensor object fusion and sensor-based erroneous data management for autonomous vehicles. Proc. of the IEEE Sensors Applications Symposium, 2019. DOI: 10.1109/SAS.2019.8705970. |
| 8 | LONG Q, XIE Q W, MITA S, et al. A real-time dense stereo matching method for critical environment sensing in autonomous driving. Proc. of the IEEE International Conference on Intelligent Transportation Systems, 2014: 853−860. |
| 9 | XU Y Q, MITA S, TEHRANI H, et al Real-time stereo disparity quality improvement for challenging traffic environments. Proc. of the IEEE Intelligent Vehicles Symposium, 2018, 1749- 1754. |
| 10 |
SUN Z, MA C, WANG L, et al A deep learning-based binocular perception system. Journal of Systems Engineering and Electronics, 2021, 32 (1): 7- 20.
doi: 10.23919/JSEE.2021.000002 |
| 11 |
ACHARYYA M, KUNDU M K Extraction of noise tolerant, gray-scale transform and rotation invariant features for texture segmentation using wavelet frames. International Journal of Wavelets, Multiresolution and Information Processing, 2008, 6 (3): 391- 417.
doi: 10.1142/S0219691308002252 |
| 12 | XIE Q W, HU X Y, REN L, et al A binocular vision application in IoT: realtime trustworthy road condition detection system in passable area. IEEE Trans. on Industrial Informatics, 2022, 19 (1): 973- 983. |
| 13 | YANG L, WANG B Q, ZHANG R H, et al Analysis on location accuracy for the binocular stereo vision system. IEEE Photonics Journal, 2017, 10 (1): 1- 16. |
| 14 |
PATOLE S M, TORLAK M, WANG D, et al Automotive radars: a review of signal processing techniques. IEEE Signal Processing Magazine, 2017, 34 (2): 22- 35.
doi: 10.1109/MSP.2016.2628914 |
| 15 | SKOLNIK M I. Introduction to radar. Radar Handbook. New York: McGraw-Hill, 1962. |
| 16 | YOSHIOKA M, SUGANUMA N, YONEDA K, et al Real-time object classification for autonomous vehicle using lidar. Proc. of the International Conference on Intelligent Informatics and Biomedical Sciences, 2017, 210- 211. |
| 17 |
BHATTI A, NAHAVANDI S Depth estimation using multiwavelet analysis based stereo vision approach. International Journal of Wavelets, Multiresolution and Information Processing, 2008, 6 (3): 481- 497.
doi: 10.1142/S0219691308002434 |
| 18 |
MONDAL M A M, ALI M H Self-guided stereo correspondence estimation algorithm. International Journal of Image and Graphics, 2021, 21 (3): 2150028.
doi: 10.1142/S0219467821500285 |
| 19 |
CHENG C B, LI H, ZHANG L M An unsupervised stereo matching cost based on sparse representation. International Journal of Wavelets, Multiresolution and Information Processing, 2021, 19 (1): 2050060.
doi: 10.1142/S0219691320500605 |
| 20 |
LIU H Y, BHATTACHARYA P Stereo matching using the discrete wavelet transform. International Journal of Wavelets, Multiresolution and Information Processing, 2007, 5 (4): 567- 588.
doi: 10.1142/S0219691307001902 |
| 21 |
NIE Y, MA K K Adaptive rood pattern search for fast block-matching motion estimation. IEEE Trans. on Image Processing, 2002, 11 (12): 1442- 1449.
doi: 10.1109/TIP.2002.806251 |
| 22 | HIRSCHMULLER H Stereo vision in structured environments by consistent semiglobal matching. Proc. of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, 2006, 2, 2386- 2393. |
| 23 | MUKHERJEE S, GUDDETI R M R. A hybrid algorithm for disparity calculation from sparse disparity estimates based on stereo vision. Proc. of the International Conference on Signal Processing and Communications, 2014. DOI: 10.1109/SPCOM.2014.6983949. |
| 24 | YANG Q X, WANG L, AHUJA N A constant-space belief propagation algorithm for stereo matching. Proc. of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, 2010, 1458- 1465. |
| 25 | TANIAI T, MATSUSHITA Y, NAEMURA T Graph cut based continuous stereo matching using locally shared labels. Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2014, 1613- 1620. |
| 26 | HIRSCHMULLER H Stereo processing by semiglobal matching and mutual information. IEEE Trans. on Pattern Analysis and Machine Intelligence, 2007, 30 (2): 328- 341. |
| 27 |
SLOAN C A, SHIPHERD J C An ethical imperative: effectively reducing SGM disparities utilizing a multi-level intervention approach. Cognitive and Behavioral Practice, 2019, 26 (2): 239- 242.
doi: 10.1016/j.cbpra.2019.02.001 |
| 28 | VANCEA C, NEDEVSHI S FPGA-based stereo vision hardware for generating dense disparity maps. Proc. of the IEEE 12th International Conference on Intelligent Computer Communication and Processing, 2016, 225- 232. |
| 29 |
TIPPETTS B J, LEE D J, ARCHIBALD J K, et al Dense disparity real-time stereo vision algorithm for resource-limited systems. IEEE Trans. on Circuits and Systems for Video Technology, 2011, 21 (10): 1547- 1555.
doi: 10.1109/TCSVT.2011.2163444 |
| 30 |
ALESSANDRETTI G, BROGGI A, CERRI P Vehicle and guard rail detection using radar and vision data fusion. IEEE Trans. on Intelligent Transportation Systems, 2007, 8 (1): 95- 105.
doi: 10.1109/TITS.2006.888597 |
| 31 | JOHN V, MITA S RVNet: deep sensor fusion of monocular camera and radar for image-based obstacle detection in challenging environments. Proc. of the Pacific-Rim Symposium on Image and Video Technology, 2019, 351- 364. |
| 32 |
GANG C, JUN W Target detection method in passive bistatic radar. Journal of Systems Engineering and Electronics, 2020, 31 (3): 510- 519.
doi: 10.23919/JSEE.2020.000021 |
| 33 |
FEI L, YAN L, CHEN C H, et al OSSIM: an object-based multiview stereo algorithm using SSIM index matching cost. IEEE Trans. on Geoscience and Remote Sensing, 2017, 55 (12): 6937- 6949.
doi: 10.1109/TGRS.2017.2737033 |
| 34 | NAHAR S, JOSHI M V Dense disparity estimation based on feature matching and IGMRF regularization. Proc. of the 23rd International Conference on Pattern Recognition, 2016, 3804- 3809. |
| 35 |
XIE Q W, CHEN X, ZHANG L M, et al A robust and efficient video anti-shaking algorithm for low-end smartphone platforms. IEEE Trans. on Consumer Electronics, 2018, 65 (1): 1- 10.
doi: 10.1109/TED.2017.2779685 |
| 36 |
TUNCEL T, HAMMITT J K A new meta-analysis on the WTP/WTA disparity. Journal of Environmental Economics and Management, 2014, 68 (1): 175- 187.
doi: 10.1016/j.jeem.2014.06.001 |
| 37 |
XIE Q W, LONG Q, MITA S Integration of optical flow and Multi-Path-Viterbi algorithm for stereo vision. International Journal of Wavelets, Multiresolution and Information Processing, 2017, 15 (3): 1750022.
doi: 10.1142/S0219691317500229 |
| 38 | LONG Q, XIE Q W, MITA S, et al. Real-time dense disparity estimation based on Multi-Path-Viterbi for intelligent vehicle applications. Proc. of the British Machine Vision Conference, 2014. DOI:10.5244/C.28.127. |
| 39 | NISHIGUCHI H, NOMURA Y A study on SSD calculation between input image and subpixel-translated template images and its applications to a subpixel image matching problem. Proc. of the Intelligent Robots and Computer Vision XXVI: Algorithms and Techniques, 2009, 243- 250. |
| 40 | GEIGER A, LENZ P, URTASUN R Are we ready for autonomous driving? The KITTI vision benchmark suite. Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2012, 3354- 3361. |
| No related articles found! |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||