
Journal of Systems Engineering and Electronics ›› 2023, Vol. 34 ›› Issue (6): 1565-1575.doi: 10.23919/JSEE.2023.000093
• SYSTEMS ENGINEERING • Previous Articles Next Articles
Zhiwen XIAO( ), Xiaowei FU()
), Xiaowei FU()
Received:2021-08-31
Online:2023-12-18
Published:2023-12-29
Contact:
Xiaowei FU
E-mail:15399464050@qq.com;fxw@nwpu.edu.cn
About author:Supported by:Zhiwen XIAO, Xiaowei FU. A cooperative detection game: UAV swarm vs. one fast intruder[J]. Journal of Systems Engineering and Electronics, 2023, 34(6): 1565-1575.
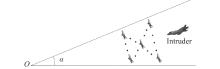
Fig 1
Schematic of the cooperative detection game"
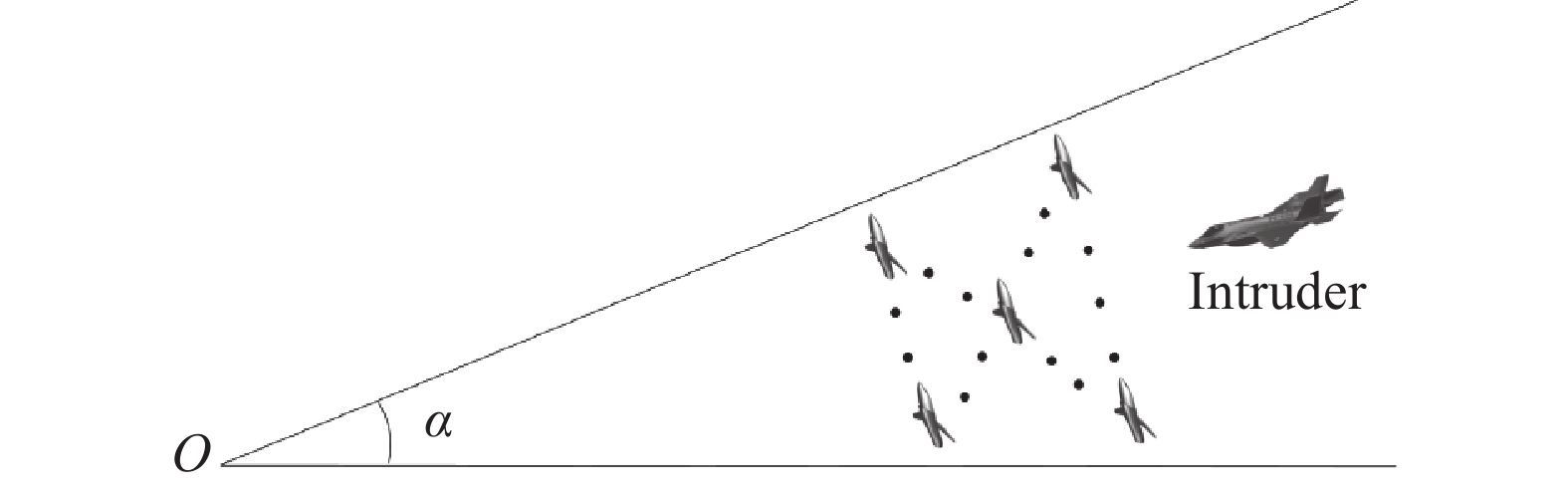

Fig 2
Schematic of the aircraft turning process"
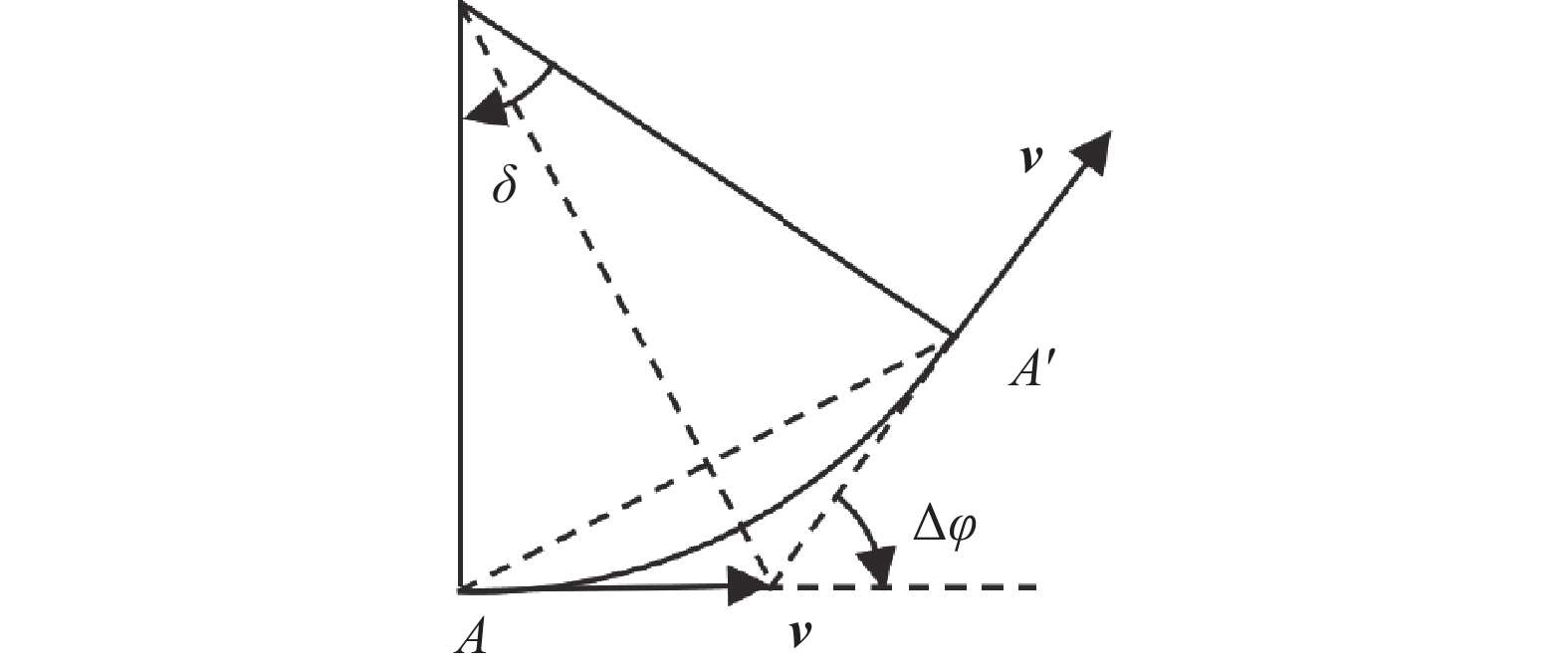

Fig 3
Schematic of the UAV’s detection range"
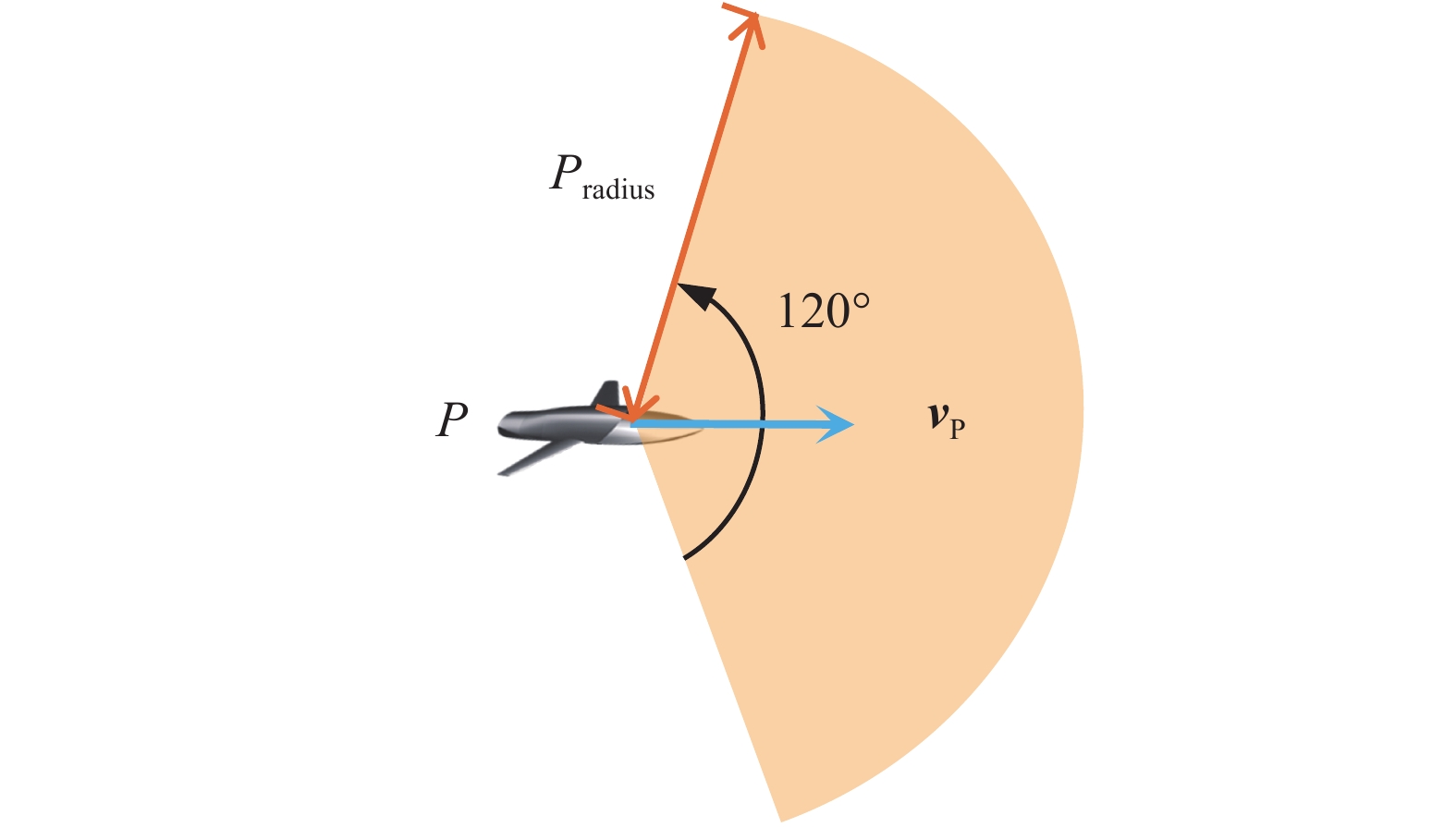

Fig 4
Schematic of the intruder’s detection range and the threat angle"


Fig 5
Schematic of the UAV’s communication range"

Fig 6
Schematic of artificial potential field method"
Fig 7
Schematic of inescapable area generated by Apollonius circle"

Fig 8
Gap and the better break-through direction"
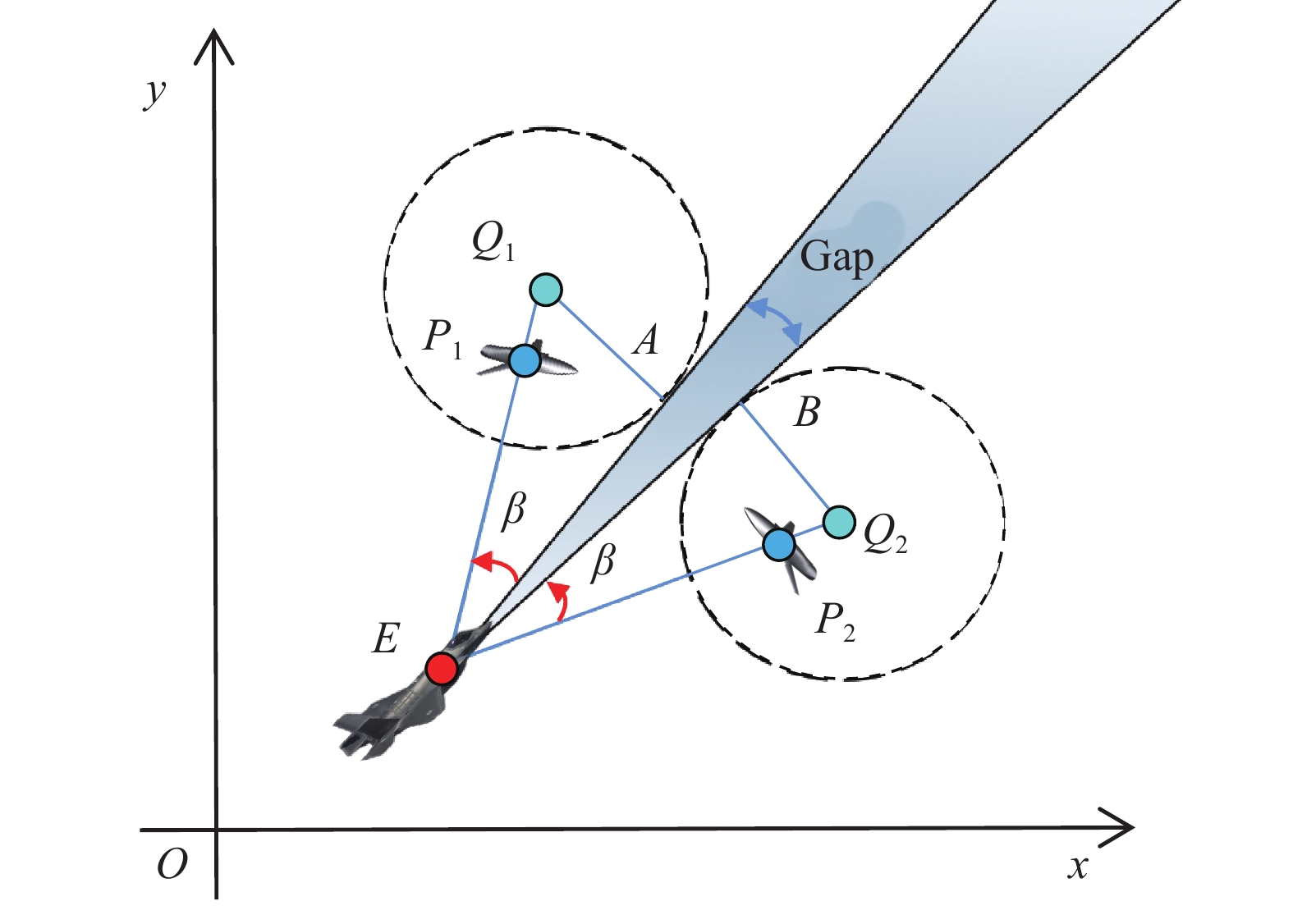
Fig 9
Offensive strategy of the fast intruder"
Fig 10
Schematic of the defensive formation"


Fig 11
Schematic of UAV patrol trajectory"
Fig 12
Role derivation for UAV swarm"
Fig 13
Schematic of co-defense front point"
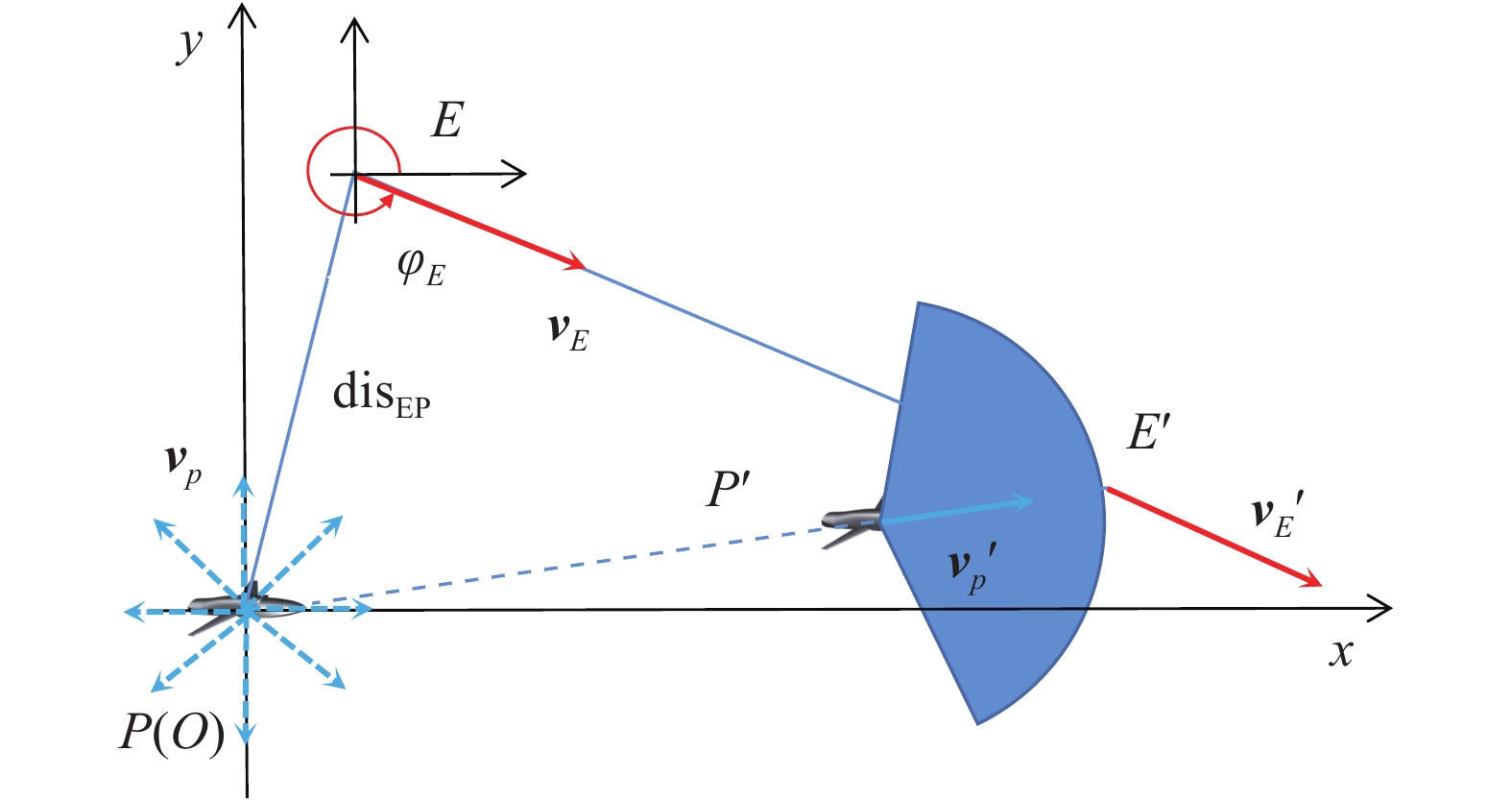

Fig 14
Schematic of the UAV’s shortest path"
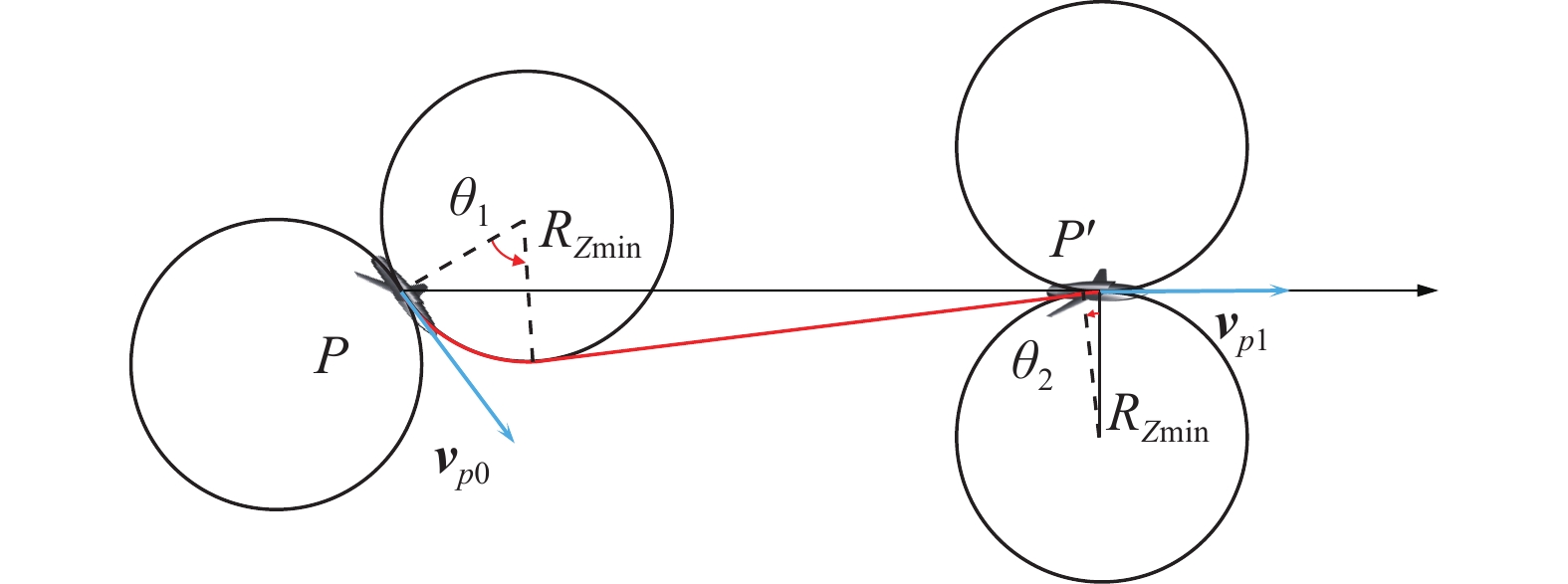
Fig 15
Schematic of five initial formations"
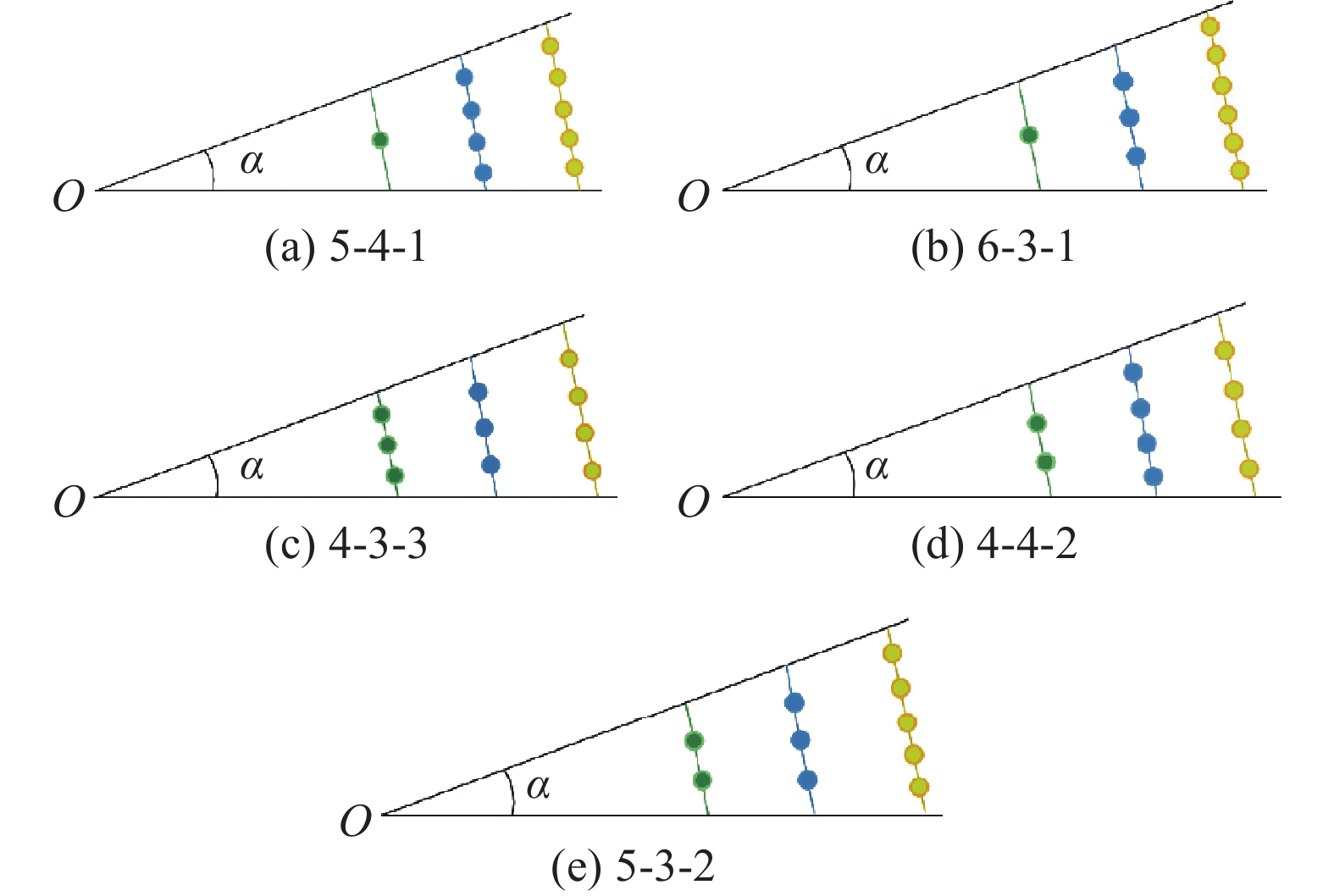

Fig 16
Schematic diagram of formation 5-3-2"
Table 1
Parameters"
| Symbol | Value |
| α/(°) | 30 |
| g/(m/s2) | 9.8 |
| vE/Ma | 1.2 |
| vP/Ma | 0.8 |
| nyE | 7g |
| nyP | 3g |
| RZ_E/km | ≥2.45 |
| RZ_P/km | ≥2.67 |
| Eradius/km | 40 |
| Pradius/km | 20 |
| Rcomm/km | 30 |
| Lf, Lm, Lb/km | 12, 16, 20 |
| Rf, Rm, Rb/km | 250, 210, 170 |
| lf, lm, lb/km | 129, 109, 88 |
| (xE, yE)/km | (264, 56) |

Fig 17
"
Fig 17
Snapshots of the result (formation 5-3-2)"
Table 2
Simulation results when the invaders are born in different positions (500 rounds)"
| Formation | Time of first discovery/s | Discovery duration/s |
| 5-4-1 | 35.518 | 561.056 |
| 6-3-1 | 40.534 | 549.258 |
| 4-3-3 | 37.071 | 589.573 |
| 4-4-2 | 36.683 | 603.743 |
| 5-3-2 | 35.517 | 575.174 |

Fig 18
Box diagram of the first discovery time in the five formations"

Fig 19
Box diagram of the average discovery duration in the five formations"
Table 3
Simulation results of the intruder at different speeds (500 rounds) s"
| Formation | Result | Ma | ||||||||
| 1.2 | 1.3 | 1.4 | 1.5 | 1.6 | 1.7 | 1.8 | 1.9 | 2.0 | ||
| 5-4-1 | Tfd1 | 35.518 | 31.309 | 28.150 | 28.498 | 28.895 | 26.197 | 24.196 | 22.585 | 21.094 |
| T1 | 561.056 | 497.481 | 443.576 | 399.244 | 343.926 | 318.207 | 290.478 | 273.653 | 258.088 | |
| 6-3-1 | Tfd2 | 40.534 | 32.105 | 25.307 | 22.065 | 19.898 | 19.001 | 18.235 | 17.680 | 16.888 |
| T2 | 549.258 | 503.156 | 437.796 | 392.664 | 356.119 | 329.642 | 297.254 | 267.073 | 250.544 | |
| 4-3-3 | Tfd3 | 37.071 | 33.075 | 29.857 | 28.772 | 27.708 | 25.043 | 22.833 | 20.762 | 19.308 |
| T3 | 589.573 | 516.632 | 464.017 | 418.651 | 372.827 | 341.496 | 314.404 | 293.527 | 274.68 | |
| 4-4-2 | Tfd4 | 36.683 | 32.116 | 29.289 | 27.964 | 27.088 | 24.732 | 22.655 | 20.454 | 18.931 |
| T4 | 603.743 | 523.975 | 465.996 | 417.489 | 377.113 | 339.562 | 313.404 | 295.976 | 282.42 | |
| 5-3-2 | Tfd5 | 35.517 | 31.306 | 28.728 | 28.810 | 29.139 | 26.352 | 23.999 | 22.284 | 20.775 |
| T5 | 575.174 | 508.454 | 455.597 | 412.272 | 367.476 | 333.122 | 305.661 | 286.299 | 265.045 | |
Table 4
Scores of each formation"
| Formation | Score1 | Score2 |
| 5-4-1 | 7.424 | 8.390 |
| 6-3-1 | 8.851 | 8.392 |
| 4-3-3 | 7.521 | 8.911 |
| 4-4-2 | 7.660 | 8.988 |
| 5-3-2 | 7.417 | 8.713 |
Fig 20
Proportional distribution of discovery duration (Case 2 vs. Case 1)"
Fig 21
Proportional distribution of discovery duration (Case 3 vs. Case 1)"
| 1 | BEIN D, BEIN W, KARKI A, et al. Optimizing border patrol operations using unmanned aerial vehicles. Proc. of the 12th International Conference on Information Technology-New Generations, 2015. DOI: 10.1109/ITNG.2015.83. |
| 2 | PARK J H, CHOI S C, AHN I Y, et al. Multiple UAVs-based surveillance and reconnaissance system utilizing IoT platform. Proc. of the International Conference on Electronics, Information, and Communication, 2019. DOI: 10.23919/ELINFOCOM.2019.8706406. |
| 3 | SHI X H, BI B, ZHANG Q, et al. Consensus-based multi-UAV target tracking with communication delays. Proc. of the International Conference on Intelligent Human-Machine Systems and Cybernetics, 2017. DOI: 10.1109/IHMSC.2017.187. |
| 4 | XIA Z Y, DU J, JIANG C X, et, al. Multi-UAV cooperative target tracking based on swarm intelligence. Proc. of the IEEE International Conference on Communications, 2021. DOI: 10.1109/ICC42927.2021.9500771. |
| 5 |
REN W, BEARD R W, ATKINS E M Information consensus in multivehicle cooperative control. IEEE Control Systems Magazine, 2007, 27 (2): 71- 82.
doi: 10.1109/MCS.2007.338264 |
| 6 | WANG Q L, GAO H J, ALSAADI F, et al An overview of consensus problems in constrained multi-agent coordination. Systems Science & Control Engineering, 2014, 2 (1): 275- 284. |
| 7 |
OH K, PARK M, AHN H A survey of multi-agent formation control. Automatica, 2015, 53, 424- 440.
doi: 10.1016/j.automatica.2014.10.022 |
| 8 |
ZHU B, XIE L H, HAN D, et al A survey on recent progress in control of swarm systems. Science China Information Sciences, 2017, 60 (7): 070201.
doi: 10.1007/s11432-016-9088-2 |
| 9 | SENANAYAKE M, SENTHOORAN I, BARCA J C, et al Search and tracking algorithms for swarms of robots: a survey. Robotics and Autonomous Systems, 2016, 75 (B): 422- 434. |
| 10 | ZHENG T Y, YAO Y, HE F H, et al. A cooperative detection method for tracking a non-cooperative space target. Proc. of Chinese Control Conference, 2019. DOI:10.23919/ChiCC.2019.8866314. |
| 11 | HUANG L, HUANG Q, ZHOU W J. Research on cooperative target detection and tracking of unmanned ground vehicles. Proc. of the International Conference on Artificial Intelligence and Big Data, 2018. DOI: 10.1109/ICAIBD.2018.8396180. |
| 12 |
ISAACS R Differential games: a mathematical theory with applications to warfare and pursuit, control and optimization. The Mathematical Gazette, 1967, 51 (375): 80- 81.
doi: 10.2307/3613661 |
| 13 | WANG X, CRUZ J B, CHEN G S, et al. Formation control in multi-player pursuit evasion game with superior evaders. Proc. of Defense Transformation and Net-Centric Systems, 2007. DOI: 10.1117/12.723300. |
| 14 | JIN S Y, QU Z H. Pursuit-evasion games with multi-pursuer vs. one fast evader. Proc. of the 8th World Congress on Intelligent Control and Automation, 2010. DOI: 10.1109/WCICA.2010.5553770. |
| 15 |
CHEN J, ZHA W Z, PENG Z H, et, al Multi-player pursuit-evasion games with one superior evader. Automatica, 2016, 71, 24- 32.
doi: 10.1016/j.automatica.2016.04.012 |
| 16 | WANG H P, YUE Q, LIU J T. Research on pursuit-evasion games with multiple heterogeneous pursuers and a high speed evader. Proc. of the 27th Chinese Control and Decision Conference, 2015. DOI: 10.1109/CCDC.2015.7162697. |
| 17 | RAMANA M V, KOTTHARI M Pursuit-evasion games of high speed evader. Journal of Intelligent & Robotic Systems, 2017, 85, 293- 306. |
| 18 |
KADA B, KHALID M, SHAIKH M S Distributed cooperative control of autonomous multi-agent UAV systems using smooth control. Journal of Systems Engineering and Electronics, 2020, 31 (6): 1297- 1307.
doi: 10.23919/JSEE.2020.000100 |
| 19 |
KOOHIFAR F, GUVENC I, SICHITIU M L Autonomous tracking of intermittent RF source using a UAV swarm. IEEE Access, 2018, 6, 15884- 15897.
doi: 10.1109/ACCESS.2018.2810599 |
| 20 | ZHANG M F, LIU H H T Cooperative tracking a moving target using multiple fixed-wing UAVs. Journal of Intelligent and Robotic Systems, 2016, 81 (3/4): 505- 529. |
| 21 | BROWN J, RAJ N. Guidance law for a surveillance UAV swarm tracking a high capability malicious UAV. Proc. of the IEEE Asia Pacific Conference on Wireless and Mobile, 2021. DOI: 10.1109/APWiMob51111.2021.9435240. |
| 22 | BROWN J, RAJ N. The impact of initial swarm formation for tracking of a high capability malicious UAV. Proc. of the IEEE International IOT, Electronics and Mechatronics Conference, 2021. DOI: 10.1109/IEMTRONICS52119.2021.9422506. |
| 23 | BROWN J, RAJ N. Predictive tracking of a high capability malicious UAV. Proc. of the IEEE 11th Annual Computing and Communication Workshop and Conference, 2021. DOI: 10.1109/CCWC51732.2021.9376137. |
| 24 | MOLL A V, CASBEER D, GARCIA ELOY, et al The multi-pursuer single-evader game. Journal of Intelligent & Robotic Systems, 2019, 96, 193- 207. |
| 25 | KOTHARI M, MANATHARA J G, POSTLETHWAITE I Cooperative multiple pursuers against a single evader. Journal of Intelligent & Robotic Systems, 2017, 2017, (86): 551- 567. |
| 26 | KHACHUMOV M V Solution of the problem of group pursuit of a target under perturbations (spatial case). Scientific Technical Information, 2018, 45 (6): 435- 443. |
| 27 | HUANG D G, ZHANG W G, YANG L B Method of 3 dimensions Dubins path generated and tracked for the unpowered UAV at the approach stage. Systems Engineering and Electronics, 2016, 38 (3): 629- 637. |
| 28 | HAMEED I A. Coverage path planning software for autonomous robotic lawn mower using Dubins’ curve. Proc. of the IEEE International Conference on Real-time Computing and Robotics, 2017. DOI: 10.1109/RCAR.2017.8311915. |
| 29 | LIM C, PARK S, RYOO C, et al. A path planning algorithm for surveillance UAVs with timing mission constrains. Proc. of the International Conference on Control, Automation and Systems, 2010. DOI: 10.1109/ICCAS.2010.5669935. |
| 30 | LI R F, XU H Q, DONG J, et al. UAV path planning based on modified ant colony algorithm and DUBINS curves. Proc. of the IEEE 6th Information Technology and Mechatronics Engineering Conference, 2022. DOI: 10.1109/ITOEC53115.2022.9734332. |
| [1] | Boyu QIN, Dong ZHANG, Shuo TANG, Yang XU. Two-layer formation-containment fault-tolerant control of fixed-wing UAV swarm for dynamic target tracking [J]. Journal of Systems Engineering and Electronics, 2023, 34(6): 1375-1396. |
| [2] | Jie LI, Xiaoyu DANG, Sai LI. DQN-based decentralized multi-agent JSAP resource allocation for UAV swarm communication [J]. Journal of Systems Engineering and Electronics, 2023, 34(2): 289-298. |
| [3] | Yaozhong ZHANG, Yike LI, Zhuoran WU, Jialin XU. Deep reinforcement learning for UAV swarm rendezvous behavior [J]. Journal of Systems Engineering and Electronics, 2023, 34(2): 360-373. |
| [4] | Hao LI, Hemin SUN, Ronghua ZHOU, Huainian ZHANG. Hybrid TDOA/FDOA and track optimization of UAV swarm based on A-optimality [J]. Journal of Systems Engineering and Electronics, 2023, 34(1): 149-159. |
| [5] | Yangyang JIANG, Yan GAO, Wenqi SONG, Yue LI, Quan QUAN. Bibliometric analysis of UAV swarms [J]. Journal of Systems Engineering and Electronics, 2022, 33(2): 406-425. |
| [6] | Jinqiang HU, Husheng WU, Renjun ZHAN, Rafik MENASSEL, Xuanwu ZHOU. Self-organized search-attack mission planning for UAV swarm based on wolf pack hunting behavior [J]. Journal of Systems Engineering and Electronics, 2021, 32(6): 1463-1476. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||