
Journal of Systems Engineering and Electronics ›› 2023, Vol. 34 ›› Issue (6): 1397-1408.doi: 10.23919/JSEE.2023.000114
• AUTONOMOUS DECISION AND COOPERATIVE CONTROL OF UAV SWARMS • Previous Articles Next Articles
Weijian PANG1,2( ), Xinyi MA3,*(), Xueming LIANG1(), Xiaogang LIU1(), Erwa DONG1()
), Xinyi MA3,*(), Xueming LIANG1(), Xiaogang LIU1(), Erwa DONG1()
Received:2022-09-30
Online:2023-12-18
Published:2023-12-29
Contact:
Xinyi MA
E-mail:pangweijian2013@163.com;cynthiacatmm@163.com;mailme_6688@126.com;lxg93215@163.com;d1140431964@163.com
About author:Supported by:Weijian PANG, Xinyi MA, Xueming LIANG, Xiaogang LIU, Erwa DONG. Role-based Bayesian decision framework for autonomous unmanned systems[J]. Journal of Systems Engineering and Electronics, 2023, 34(6): 1397-1408.
Table 1
Comparison of methods for decision-making"
| Feature | MEBN | SDG | DBN | GFT | DID |
| Fuzzy knowledge description capability | √ | − | − | √ | √ |
| Probability knowledge description capability | √ | − | √ | √ | √ |
| Modeling convenience | √ | − | √ | − | √ |
| Utility decision | √ | − | − | √ | − |
| Formalization | √ | √ | − | − | √ |
| Modularization | √ | − | − | √ | √ |
| Knowledge reuse | √ | − | − | − | √ |
| Dynamic decision | √ | √ | √ | − | √ |
| Preference description capability | √ | − | − | − | − |

Fig 1
Diagram of role-based Bayesian decision framework for autonomous unmanned system"
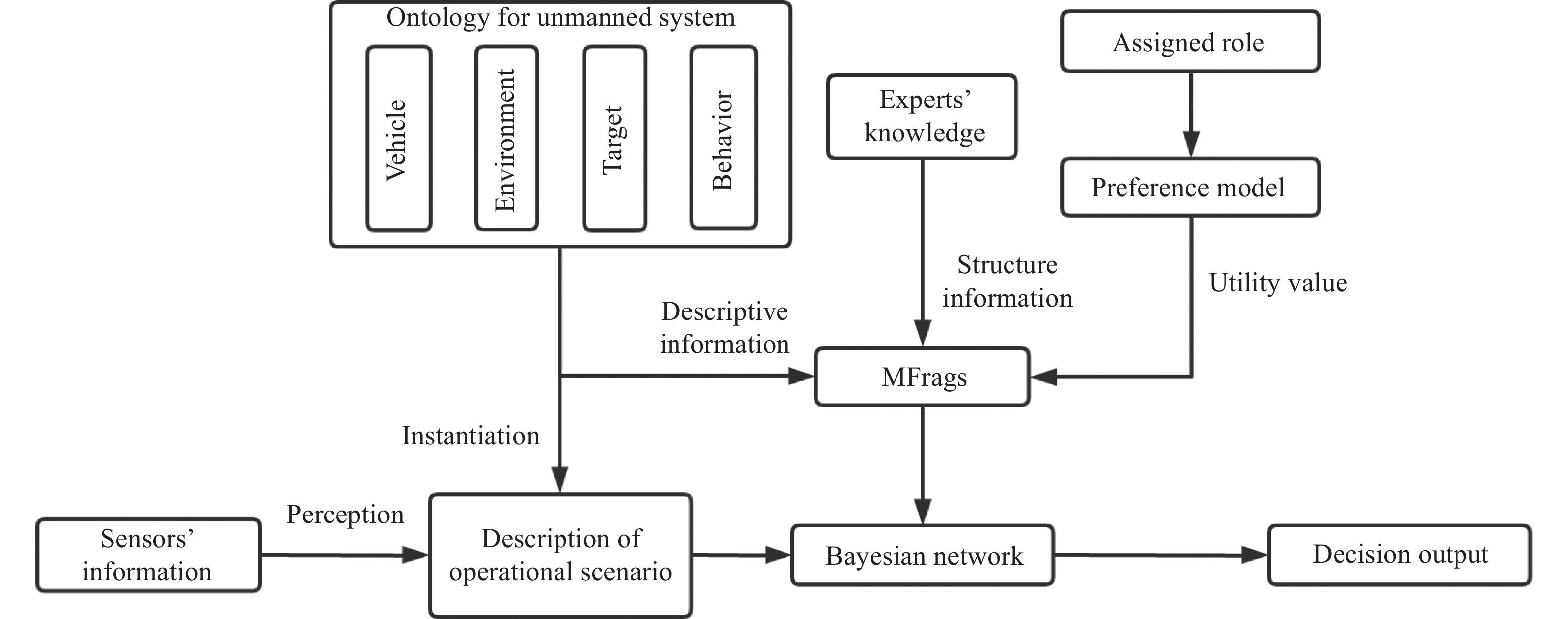

Fig 2
Swarm unmanned system cooperative region control operation scenario"
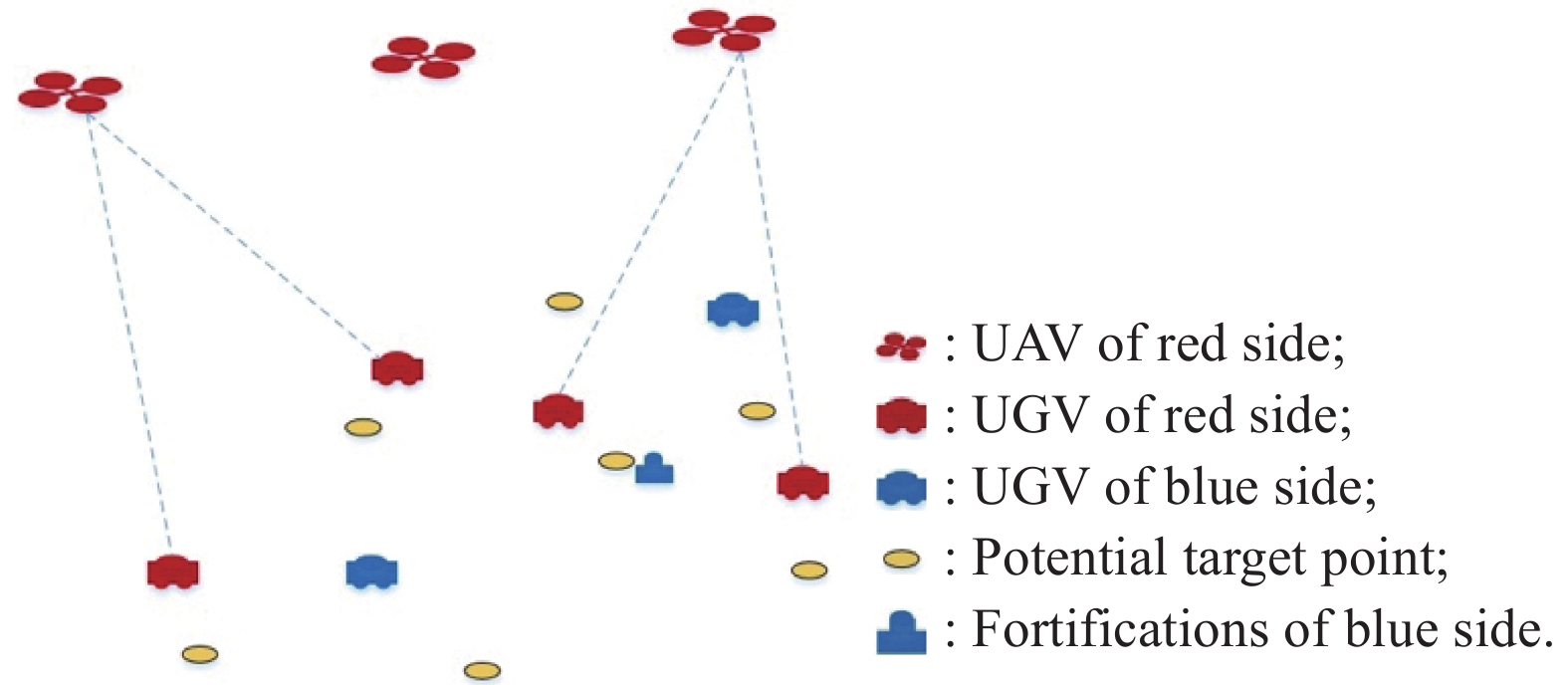
Table 2
Definition of related symbols"
| Symbols | Definition |
| A set of prior rules for autonomous decision model | |
| The mapping relationship between input and output of decision nodes | |
| The serial number of a rule | |
| Time | |
| The Lth rule | |
| Decision node | |
| Parent node of the decision node | |
| Value range of the parent node of decision node | |
| Local probability distribution function of decision node D at time t under input from its parent node | |
| The probability of the jth decision option | |
| At time t, the expected utility value of each decision option of decision node D under input X | |
| The observed value of the decision system to the environment at time t |

Fig 3
Key factors of real time dynamic planning for swarm unmanned systems"
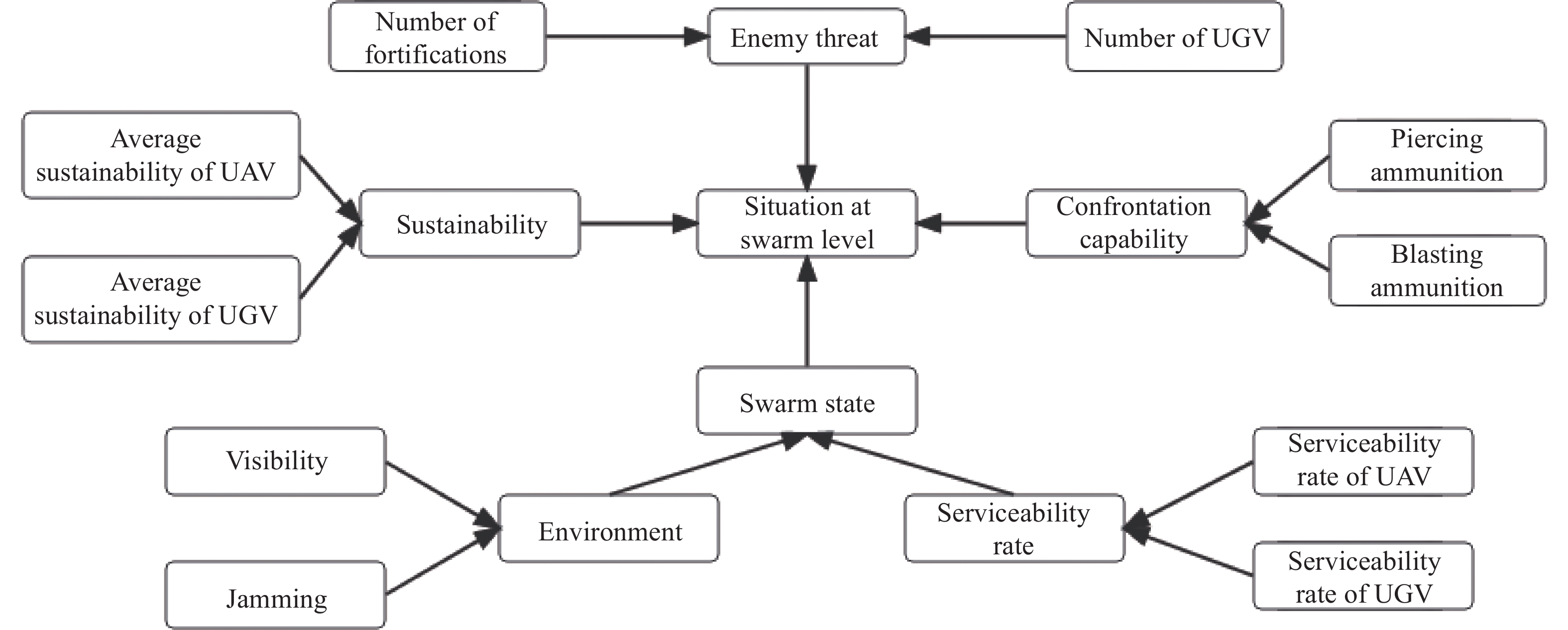
Fig 4
MFrags for swarm level situation assessment and decision model"
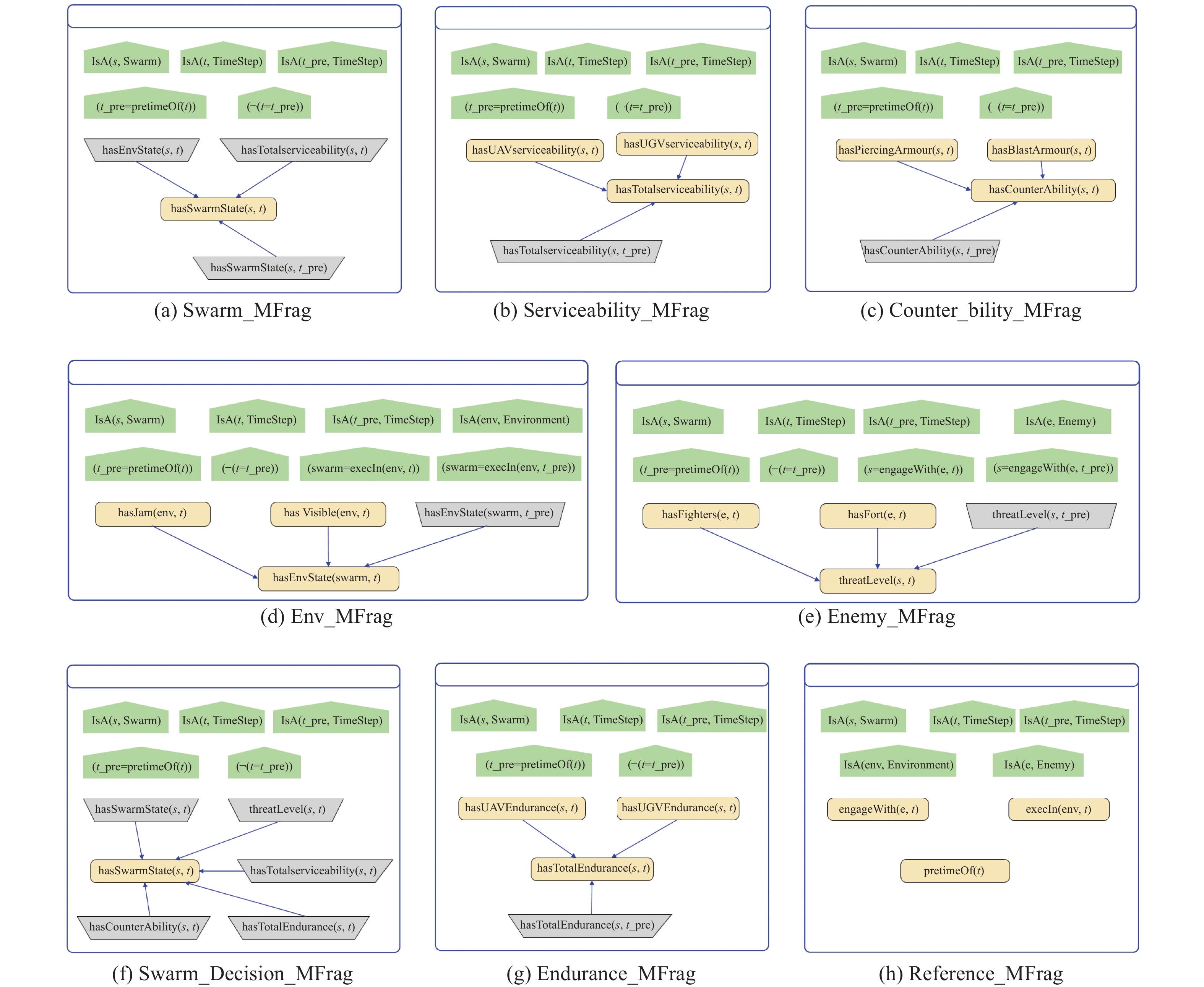
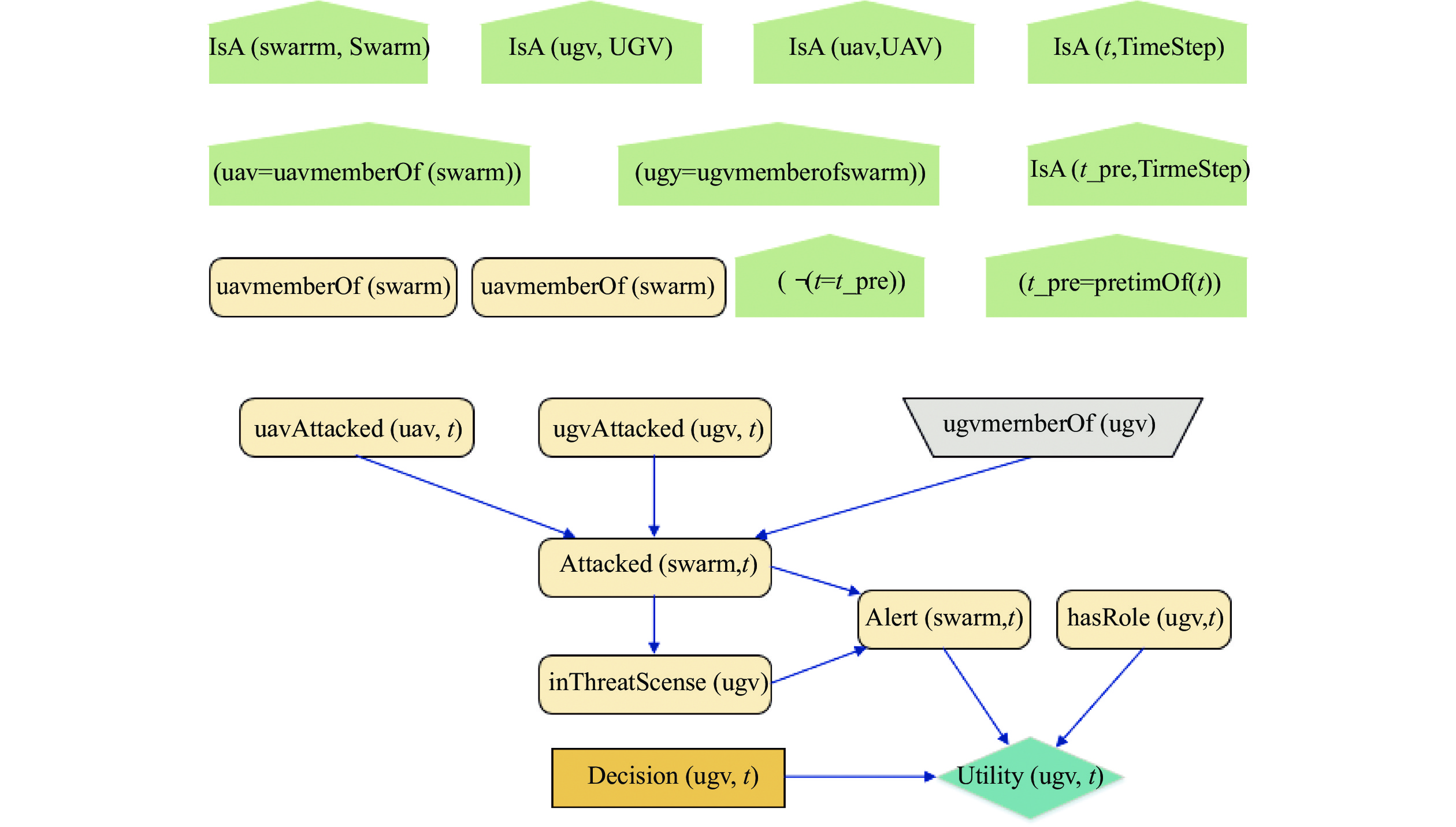
Fig 5
Role-based cooperative task planning"
Fig 6
Decision model of UGV/UAV"

Table 3
Events for swarm level decision"
| Event labels | T0 | T1 | T2 | T3 | T4 | T5 | Description |
| HASJAM | − | − | − | − | − | TRUE | Find jamming |
| HASVISIBLE | − | − | − | − | GOOD | − | Visibility |
| HASENVSTATE | GOOD | − | − | − | − | − | Environment state |
| HASFIGHTERS | HIGH | LOW | LOW | LOW | LOW | LOW | Enemy’s UGV number |
| HASFORT | LOW | LOW | LOW | HIGH | HIGH | HIGH | Enemy’s fortifications number |
| HASUAVSERVICEABILITY | HIGH | − | − | − | − | − | Serviceability rate |
| HASPIERCINGARMOUR | HIGH | HIGH | LOW | LOW | LOW | LOW | Number of piercing ammunition |
| HASBLASTARMOUR | HIGH | HIGH | HIGH | HIGH | HIGH | LOW | Number of blasting ammunition |
| HASUAVENDURACE | HIGH | HIGH | HIGH | HIGH | LOW | LOW | Average sustainability of UAV |
| HASUGVENDURANCE | HIGH | HIGH | HIGH | HIGH | HIGH | LOW | Average sustainability of UGV |
| HASTOTALENDURANCE | HIGH | − | − | − | − | − | Sustainability |
Table 4
Events for cooperation level role-based decision-making"
| T0 | T1 | T2 | T3 | T4 | T5 | T6 | T7 | Description |
| UAVATTACKED | FALSE | TRUE | FALSE | TRUE | FALSE | FALSE | FALSE | UAV is attacked |
| UGVATTACKED | FALSE | FALSE | FALSE | FALSE | FALSE | TRUE | FALSE | UGV is attacked |
| ENTERCITY | FALSE | TRUE | FALSE | FALSE | FALSE | TRUE | FALSE | Entering city |
| OPENROAD | TRUE | FALSE | TRUE | TRUE | TRUE | FALSE | TRUE | Open road |

Fig 7
Events setting of situation awareness experiment"
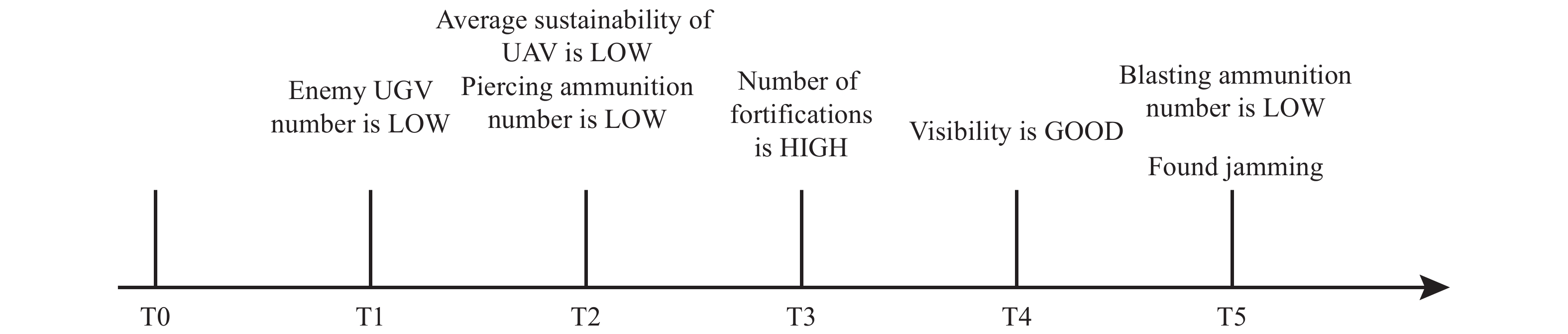

Fig 8
Inference environment situation at each time"

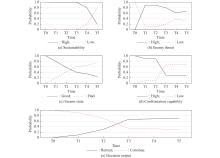
Fig 9
Probability curves of each situation element in group contingency planning model"
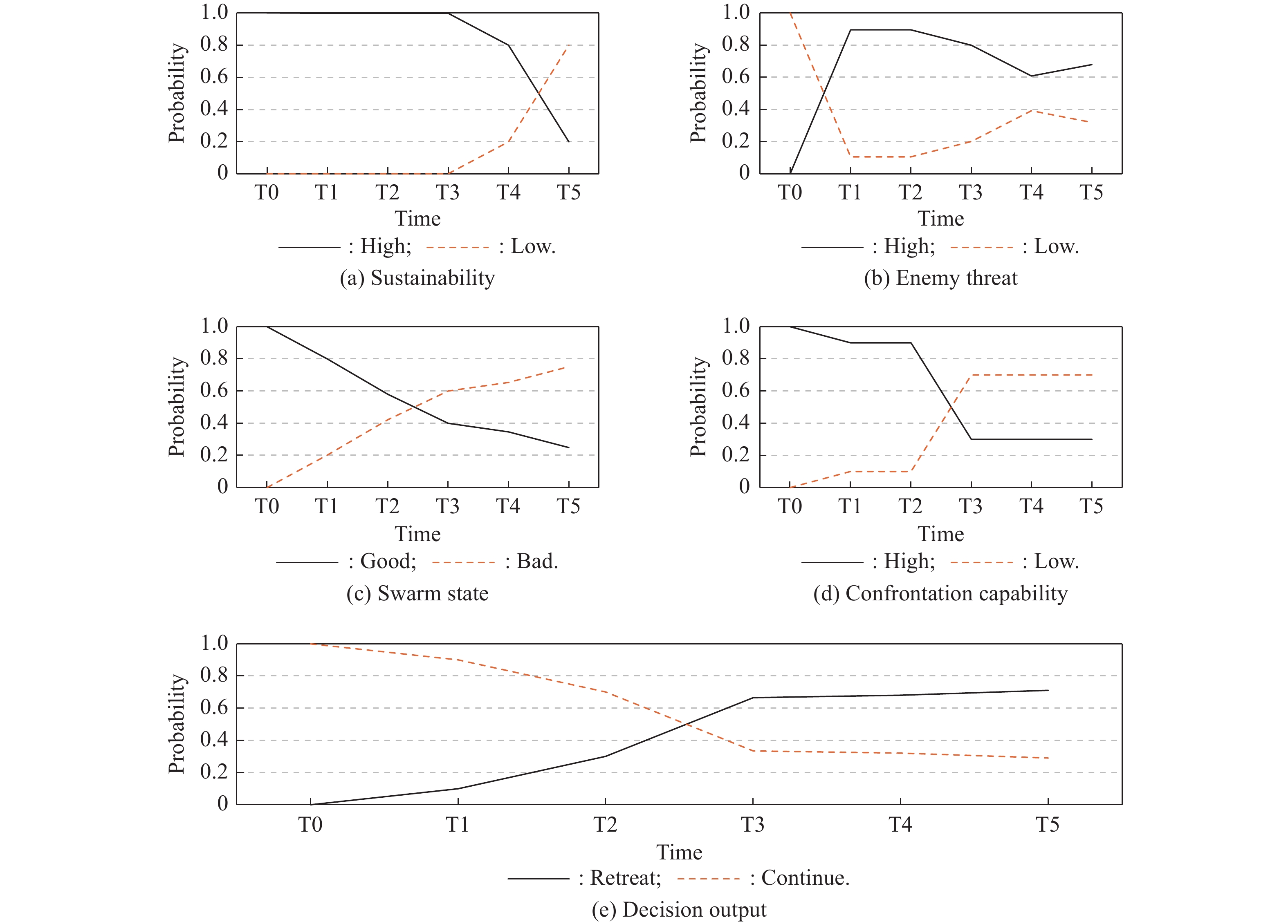

Fig 10
Decision output at T3 and T5"


Fig 11
Defined events of collaborative situation awareness"

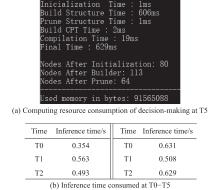
Fig 12
Computing resource consumption of decision-making"
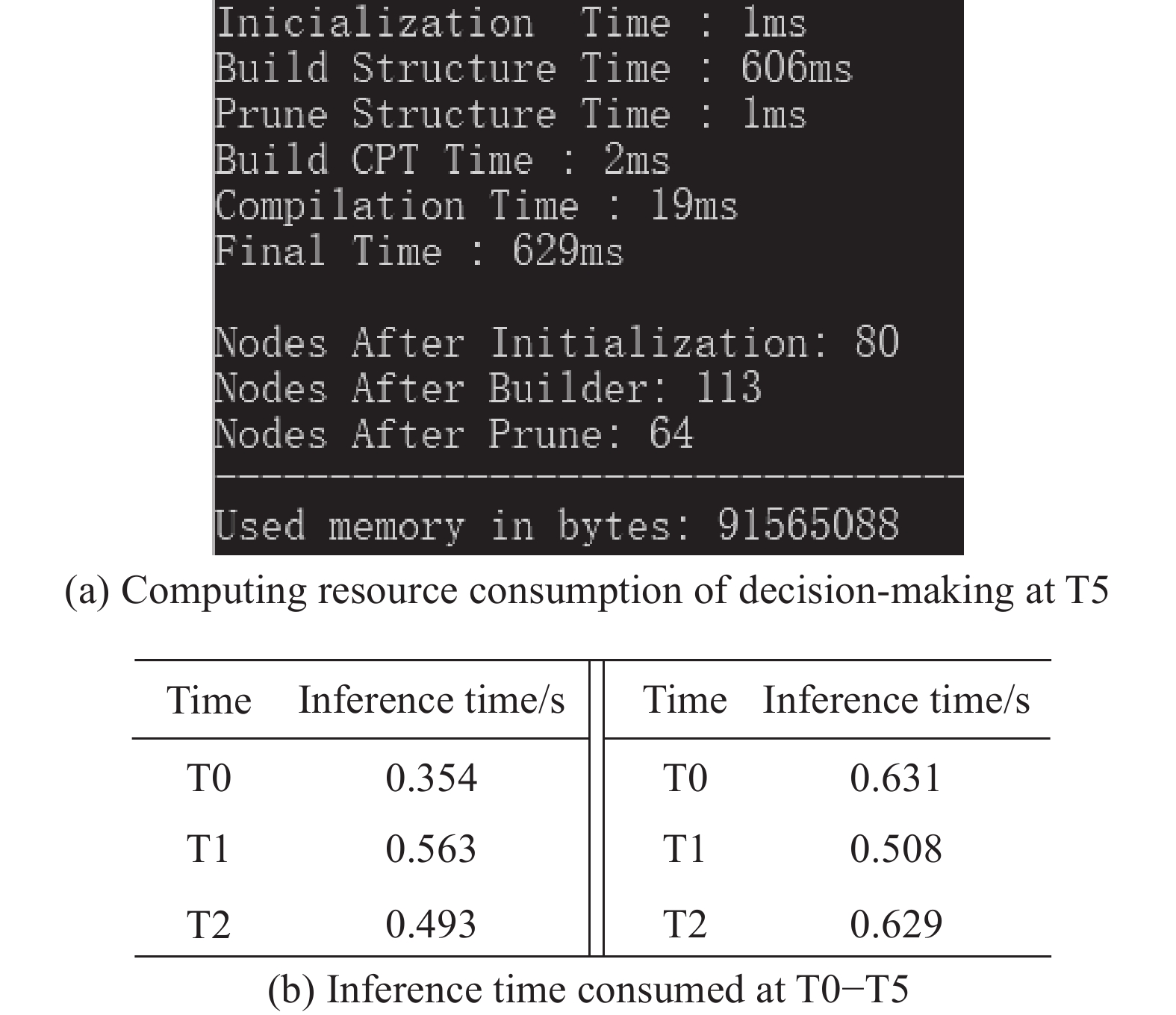
Table 5
Utility values for different roles in cooperative decision problem"
| Role | High | Low | |||||
| Search | March | Hide | Search | March | Hide | ||
| Guarder | 9 | −4 | −7 | 3 | 8 | −9 | |
| Follower | 2 | −9 | 7 | −6 | 9 | −3 | |
Table 6
Collaborative decision results"
| Time | Guarder | Follower | |||||
| Search | March | Hide | Search | March | Hide | ||
| T0 | 4.332 | 5.336 | −8.556 | −4.224 | 5.004 | −0.78 | |
| T1 | 7.523 | −1.048 | −7.492 | 0.032 | −4.572 | 4.54 | |
| T2 | 4.332 | 5.336 | −8.556 | 4.224 | 5.004 | −0.78 | |
| T3 | 5.592 | 2.816 | −8.136 | −2.544 | 1.224 | 1.32 | |
| T4 | 4.332 | 5.336 | −8.556 | −4.224 | 5.004 | −0.78 | |
| T5 | 8.112 | −2.224 | −7.296 | 0.816 | −6.336 | 5.52 | |
| T6 | 4.332 | 5.336 | −8.556 | −4.224 | 5.004 | −0.78 | |
| 1 |
OLIVARES-ALARCOS A, BESSLER D, KHAMIS A, et al A review and comparison of ontology-based approaches to robot autonomy. The Knowledge Engineering Review, 2019, 34, 29.
doi: 10.1017/S0269888919000237 |
| 2 |
ARORA A, FIORINO H, PELLIER D, et al A review of learning planning action models. The Knowledge Engineering Review, 2018, 33, 24.
doi: 10.1017/S0269888918000279 |
| 3 | FINN S G, MEDARD M, BARRY R A. A novel approach to automatic protection switching using tree. Proc. of the International Conference on Communications, 1997: 272−276. |
| 4 | WANG Y X, LIU M, PU J S, et al. Semantical obstacle representation model for fast UAV path planning. Proc. of the 2nd Asia-Pacific Conference on Intelligent Robot Systems, 2017: 180−184. |
| 5 | PANG W J, LI H, HUANG Q, et al Review on ontology-based task planning for unmanned systems. Systems Engineering and Electronics, 2021, 44 (3): 908- 920. |
| 6 | WU C G, NA Y L. Knowledge graph modeling and intelligent reasoning techniques. Beijing: Chemical Industrial Press, 2021. (in Chinese) |
| 7 | YAO H F, WANG H J, WANG Y UUV autonomous decision-making method based on dynamic influence diagram. Complexity, 2020, 2020, 8565106. |
| 8 |
ERNEST N, COHEN K, KIVELEVITCH E, et al Genetic fuzzy trees and their application towards autonomous training and control of a squadron of unmanned combat aerial vehicles. Unmanned Systems, 2015, 3 (3): 185- 204.
doi: 10.1142/S2301385015500120 |
| 9 |
LASKEY K B MEBN: a language for first-order Bayesian knowledge bases. Artificial Intelligence, 2008, 172 (2/3): 140- 178.
doi: 10.1016/j.artint.2007.09.006 |
| 10 |
LI X, SONIA B, TAMARA M W, et al SWARMs ontology: a common information model for the cooperation of underwater robots. Sensors, 2017, 17 (3): 569- 588.
doi: 10.3390/s17030569 |
| 11 |
PANG W J, LI H, MA X Y, et al A semantic-centered cloud control framework for autonomous unmanned system. Journal of Systems Engineering and Electronics, 2022, 33 (4): 771- 784.
doi: 10.23919/JSEE.2022.000077 |
| 12 | PAULO C C. Bayesian semantics for the semantic web. Washington D.C.: George Mason University, 2005. |
| 13 | CARVALHO R N, COSTA P C G, LASKEY K B, et al. PROGNOS: predictive situational awareness with probabilistic ontologies. Proc. of the 13th International Conference on Information Fusion, 2010. DOI:10.1109/ICIF.2010.5711970. |
| 14 | PARK C Y, LASKEY K B, COSTA P C G, et al. Multi-entity Bayesian ntworks learning for hybrid variables in situation awareness. Proc. of the 16th International Conference on Information Fusion, 2013: 1894−1901. |
| 15 |
PARK C Y, LASKEY K B MEBN-RM: a mapping between multi-entity Bayesian network and relational model. Applied Sciences, 2019, 9 (9): 1743.
doi: 10.3390/app9091743 |
| 16 | PARK C Y, LASKEY K B, COSTA P C G, et al. Predictive situation awareness reference model using multi-entity Bayesian networks. Proc. of the 17th International Conference on Information Fusion, 2014. https://ieeexplore.ieee.org/abstract/document/6916225. |
| 17 | PARK C Y, LASKEY K B. Reference model of multi-entity Bayesian networks for predictive situation awareness. https://arxiv.org/abs/1806.02457. |
| 18 | PARK C Y. Multi-entity Bayesian networks learning for predictive situation awareness. Commonwealth of Virginia: George Mason University, 2017. |
| 19 |
SALOTTI J M Bayesian network for the prediction of situation awareness errors. International Journal of Human Factors Modelling and Simulation, 2018, 6 (2/3): 119- 126.
doi: 10.1504/IJHFMS.2018.093174 |
| 20 | LI T, ZHANG W, GAO S, et al. Situation assessment method based on Bayesian network and its application in space battlefield. Proc. of the 2nd International Conference on Computer Engineering, Information Science and Internet Technology, 2017: 547−554. |
| 21 | MATSUMOTO S, LASKEY K B, COSTA P C G PR-OWL decision: toward reusable ontology language for decision making under uncertainty. Semantic Technology for Intelligence, Defense, and Security, 2016, (9): 37- 45. |
| 22 | WANG S. Research on unmanned combat vehicle intelligent planning technology based on domain knowledge graph. Changsha: National University of Defense Technology, 2019. (in Chinese) |
| [1] | Jun CHEN, Xudong GAO, Jia RONG, Xiaoguang GAO. A situation awareness assessment method based on fuzzy cognitive maps [J]. Journal of Systems Engineering and Electronics, 2022, 33(5): 1108-1122. |
| [2] | Yunpeng HU, Kebo LI, Yan’gang LIANG, Lei CHEN. Review on strategies of space-based optical space situational awareness [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1152-1166. |
| [3] | Huiyun Zhao, Dongge Zhang, Hui Meng, and Jiuyang Tao. Analytical measurement method for situation elements’ dynamic characteristics#br# [J]. Journal of Systems Engineering and Electronics, 2017, 28(6): 1126-1132. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||