
Journal of Systems Engineering and Electronics ›› 2023, Vol. 34 ›› Issue (5): 1191-1210.doi: 10.23919/JSEE.2023.000119
• Systems Engineering • Previous Articles Next Articles
Lei HU( ), Guoxing YI(), Yi NAN(), Hao WANG()
), Guoxing YI(), Yi NAN(), Hao WANG()
Received:2021-08-25
Online:2023-10-18
Published:2023-10-30
Contact:
Guoxing YI
E-mail:maple_hsjz@163.com;ygx@hit.edu.cn;nanyi11@163.com;21B904060@stu.hit.edu.cn
About author:Lei HU, Guoxing YI, Yi NAN, Hao WANG. Combat situation suppression of multiple UAVs based on spatiotemporal cooperative path planning[J]. Journal of Systems Engineering and Electronics, 2023, 34(5): 1191-1210.
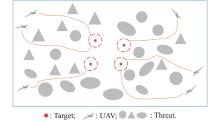
Fig 1
SEAD task scenario"
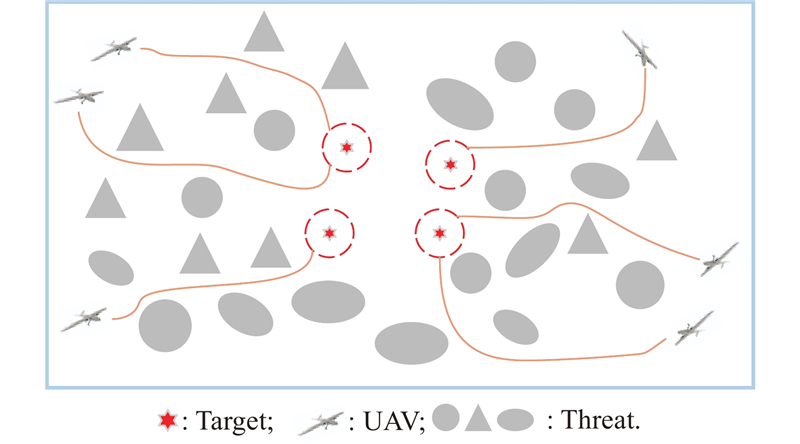

Fig 2
Target model"
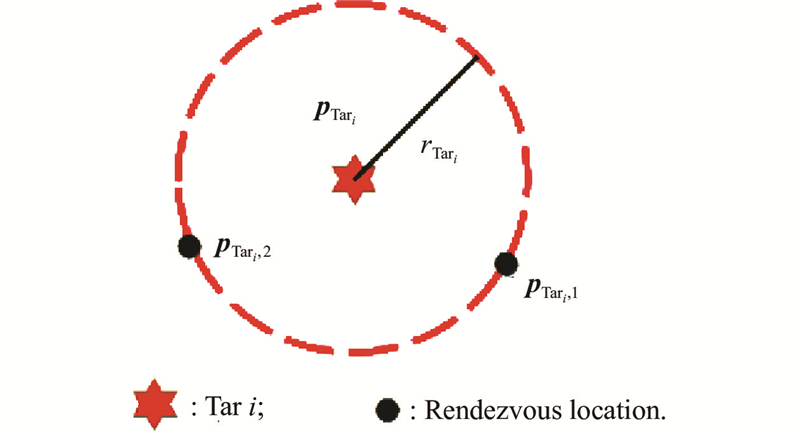

Fig 3
Threats model"
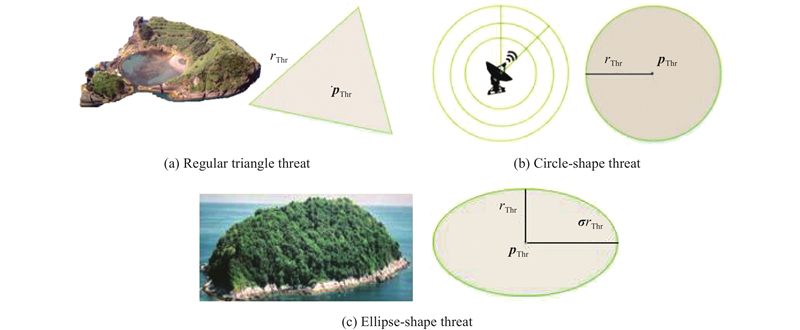
Table 1
Parameter description of threat"
| Type of threat | Size of threat |
| Regular triangle | Side length |
| Circle | Radius |
| Ellipse | Semi-minor axis,semimajor axis is |
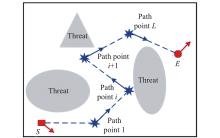
Fig 4
Direction angle of middle path points"
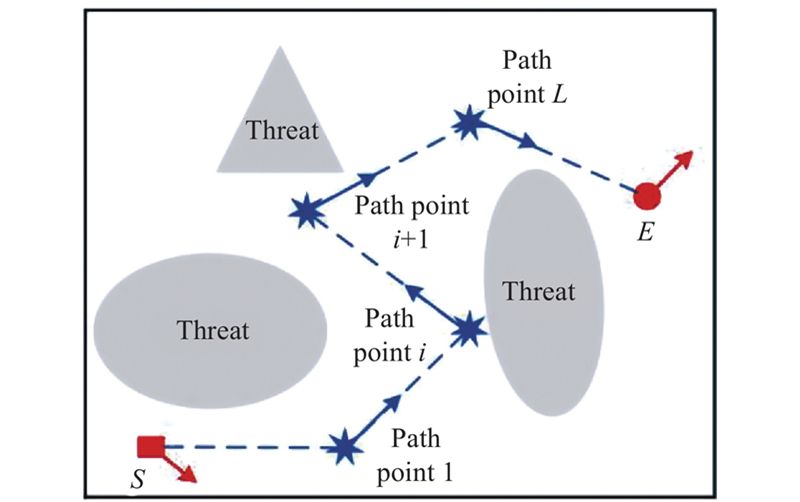

Fig 5
Sketch map of Dubins path"
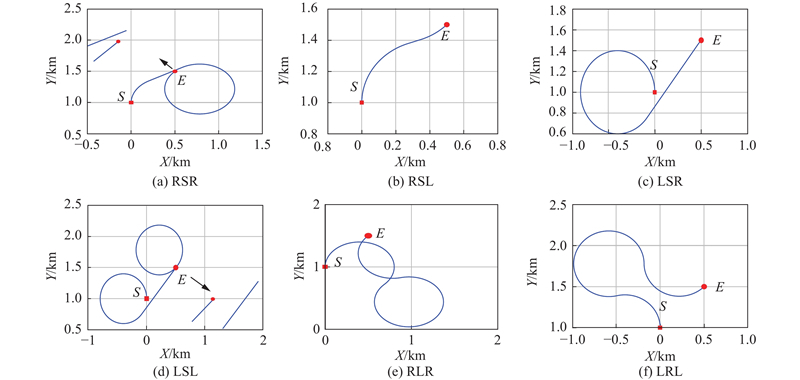
Table 2
Length of the six Dubins paths"
| Path | Length/km |
| RSR | 5.7092 |
| RSL | 0.75918 |
| LSR | 3.1962 |
| LSL | 5.7902 |
| RLR | 4.8948 |
| LRL | 3.6362 |
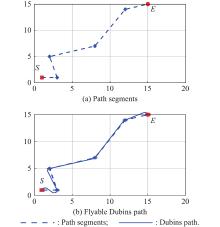
Fig 6
Path of UAV"
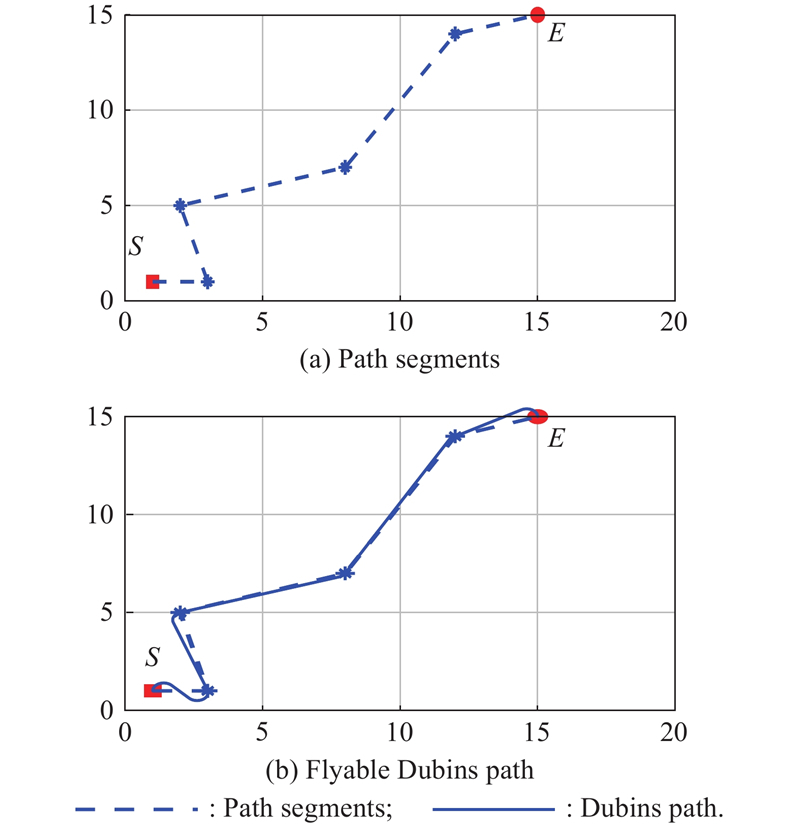

Fig 7
Overlapping sketch-maps"
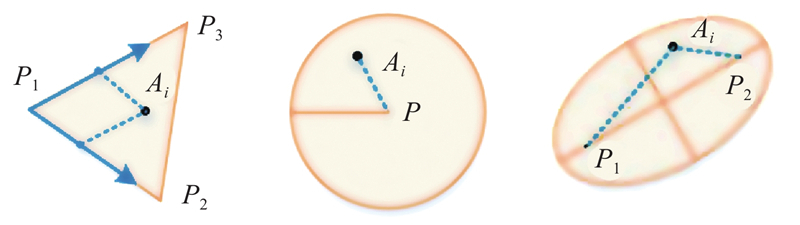
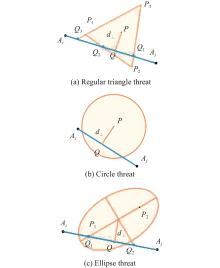
Fig 8
Sketch-maps for path segment and threats"
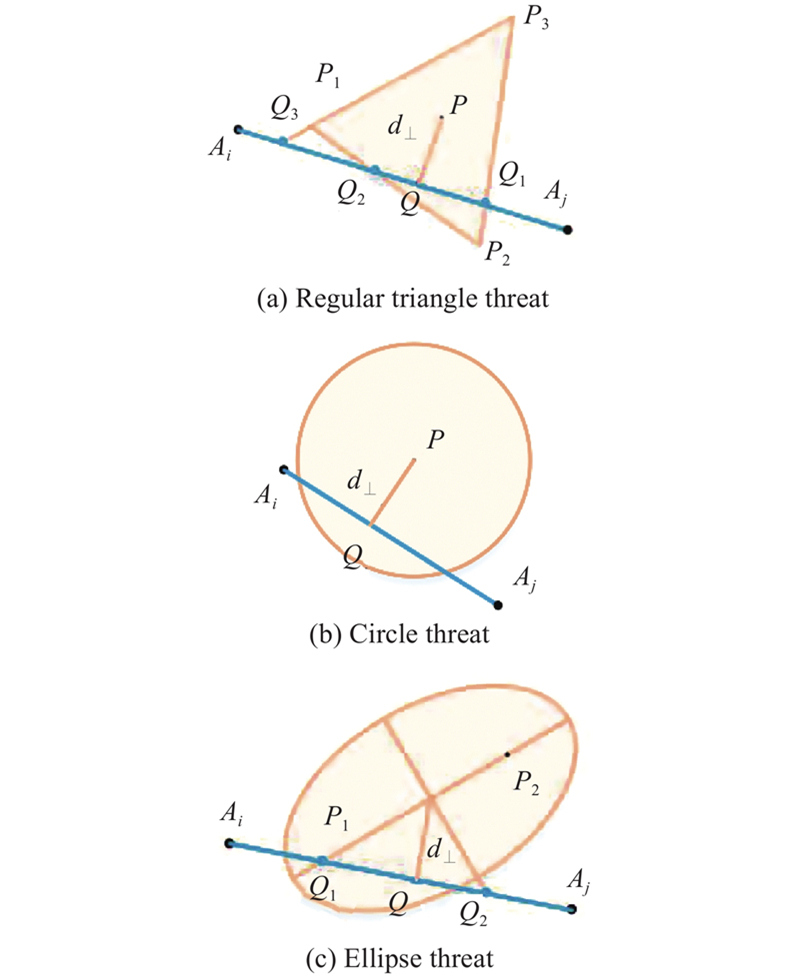

Fig 9
Flow-chart of SI-PPG algorithm"
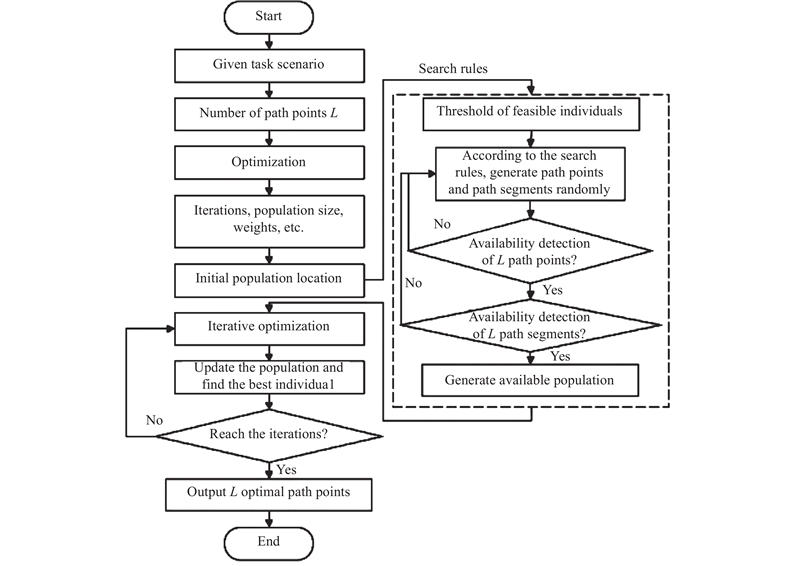
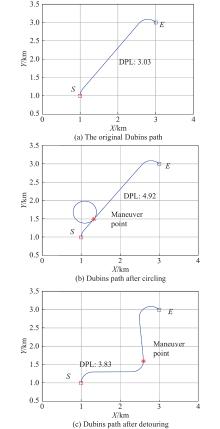
Fig 10
Dubnis path without threat"


Fig 11
Dubnis path with threat"
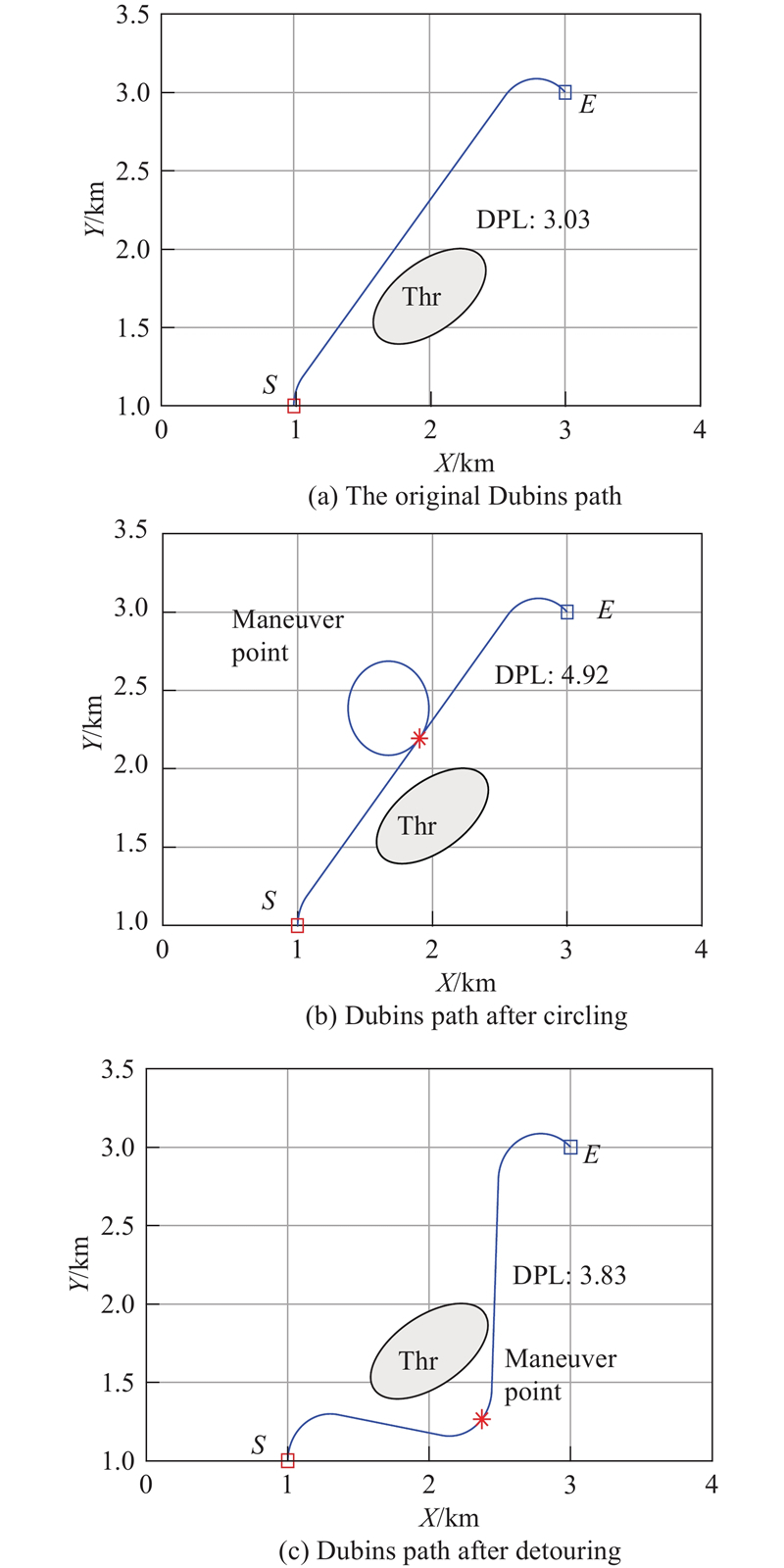
Table 3
Statistical results"
| Algorithm | Path length/km | Number of nodes | Simulation time/s |
| IBats-based PPG | 43.54 | 1 | 3.16 |
| IPSO-based PPG | 43.22 | 1 | 4.87 |
| RRT | 61.58 | 38 | 3.24 |
| BERRT | 61.11 | 41 | 2.77 |
| SAS-RRT | 62.53 | 36 | 2.86 |
| RRT star | 45.93 | 8 | 5.19 |

Fig 12
Path generation"
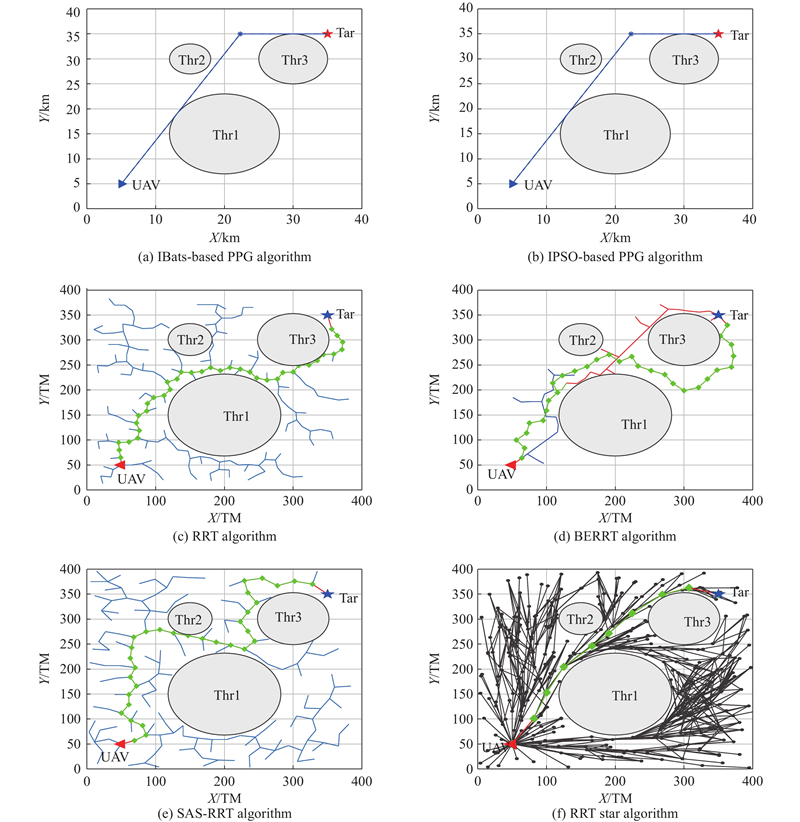

Fig 13
SEAD task scenario"
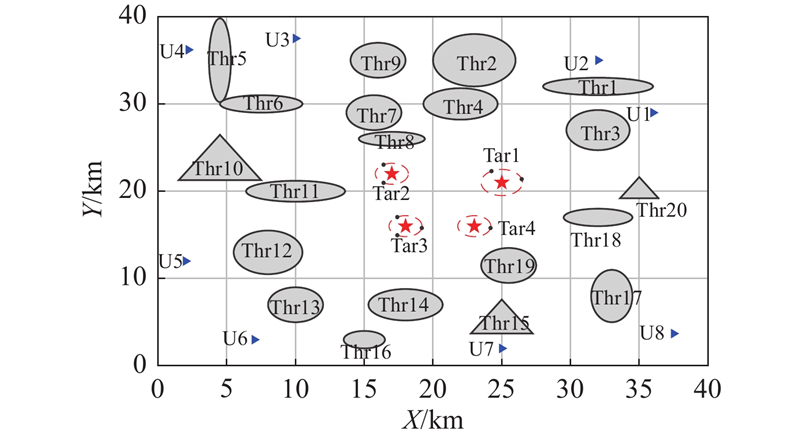
Table 4
Parameters of targets"
| Parameter | Target code | |||
| Target1 | Target2 | Target3 | Target4 | |
| Location/km | (25,21) | (17,22) | (17.9,16.1) | (23,16) |
| Attack radius/km | 1.5 | 1.2 | 1.2 | 1.2 |
| Requirement | 2 | 2 | 3 | 1 |
Table 5
Parameters of UAVs"
| Parameter | UAV code | |||||||
| U1 | U2 | U3 | U4 | U5 | U6 | U7 | U8 | |
| Initial location/km | (36,29) | (32,35) | (10,37.5) | (2.2,36.2) | (2,12) | (7,3) | (25,2) | (37.5,3.7) |
| Turning rate/(rad/s) | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 |
| Speed range/(m/s) | [50,80] | [40,70] | [65,85] | [40,80] | [45,75] | [45,75] | [35,70] | [45,75] |
Table 6
Parameters of threats"
| Parameter | Threat code | ||||||
| Thr1 | Thr2 | Thr3 | Thr4 | Thr5 | Thr6 | Thr7 | |
| Location/km | (32,32) | (23,35) | (32,27) | (22,30) | (4.5,35) | (7.5,30) | (15.7,29) |
| Shape code | 3 | 2 | 2 | 2 | 3 | 3 | 2 |
| Size/km | 1/4 | 3 | 2.3 | 1.8/2.7 | 0.8/4.8 | 1/3 | 2 |
| Azimuth/(°) | 0 | 90 | 0 | 0 | 90 | 0 | 60 |
| Parameter | Threat code | ||||||
| Thr8 | Thr9 | Thr10 | Thr11 | Thr12 | Thr13 | Thr14 | |
| Location/km | (17,26) | (16,35) | (4.5,23) | (10,20) | (8,13) | (10,7) | (18,7) |
| Shape code | 3 | 2 | 1 | 3 | 2 | 2 | 3 |
| Size/km | 0.8/2.4 | 2 | 6 | 1.2/3.6 | 2.5 | 2 | 1.8/2.7 |
| Azimuth/(°) | 0 | 0 | 0 | 0 | 45 | 0 | 0 |
| Parameter | Threat code | ||||||
| Thr15 | Thr16 | Thr17 | Thr18 | Thr19 | Thr20 | ||
| Location/km | (25,5) | (15,3) | (33,8) | (32,17) | (25.5,11.5) | (25,20) | |
| Shape code | 1 | 3 | 3 | 3 | 2 | 1 | |
| Size/km | 4.5 | 1/1.5 | 1.5/3 | 1/2.5 | 2 | 2.8 | |
| Azimuth/(°) | 0 | 0 | 90 | 0 | −40 | 120 | |
Table 7
Task assignment"
| UAV code | Execution target | Location/km | Terminal angel/(°) |
| U1 | Tar1 | (26.4,21.4) | 15 |
| U2 | Tar1 | (24.3,22.3) | 120 |
| U3 | Tar2 | (16.4,23) | 120 |
| U4 | Tar2 | (16.4,21) | −120 |
| U5 | Tar3 | (17.4,17) | 120 |
| U6 | Tar3 | (17.4,15) | −120 |
| U7 | Tar3 | (19.2,15.8) | −10 |
| U8 | Tar4 | (24.2,15.8) | −10 |

Fig 14
Generated path segments"
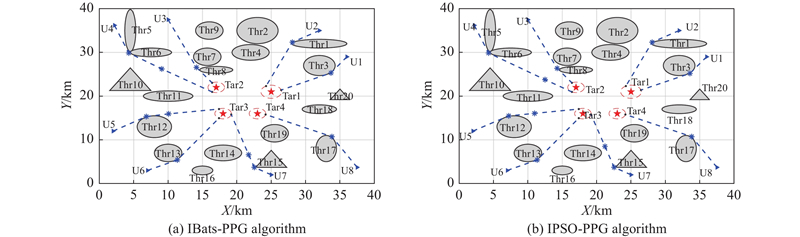
Fig 15
Mean fitness value"
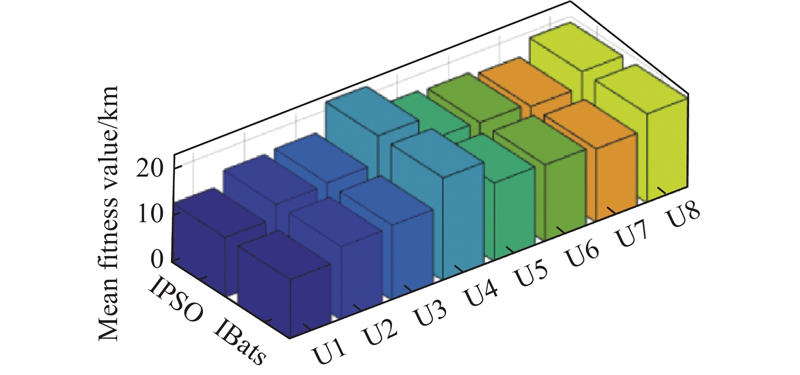
Fig 16
Mean simulation time"
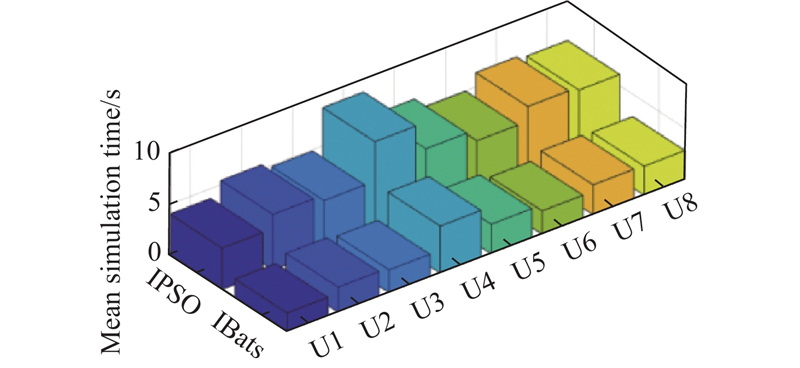

Fig 17
Smoothed path for the path segments generated by IBats-PPG algorithm"
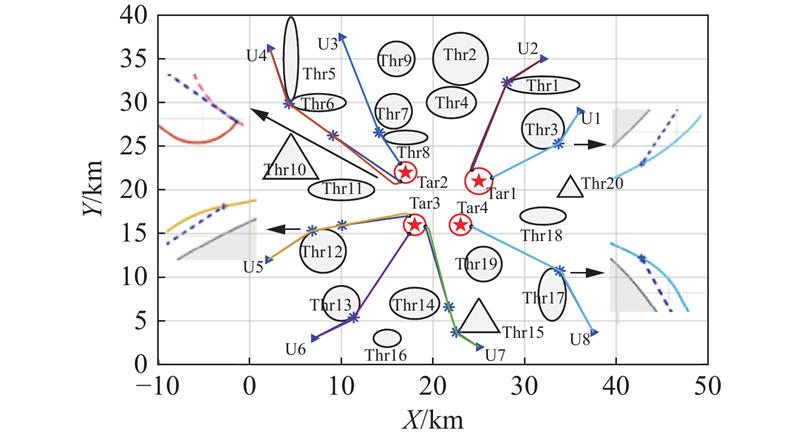

Fig 18
Smoothed path for the path segments generated by IPSO-PPG algorithm"
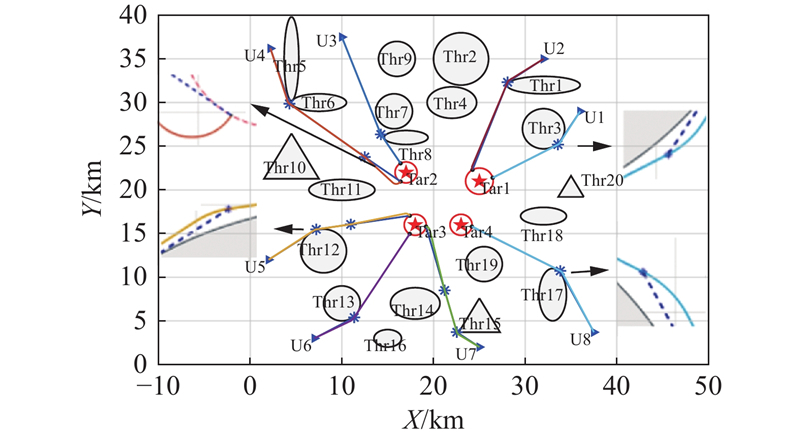
Table 8
Cooperation rendezvous information"
| Item | U1 | U2 | U3 | U4 | U5 | U6 | U7 | U8 |
| DPL/ km | 12.615 | 15.591 | 15.885 | 22.328 | 16.797 | 16.302 | 15.744 | 18.855 |
| Control way | Path | Speed | Path | Speed | Speed | Speed | Speed | Speed |
| Maneuver distance/ km | 1.340 | − | 2.26 | − | − | − | − | − |
| Maneuver strategy | Detouring | − | Circling | − | − | − | − | − |
| Maneuver times | 1 | − | 1 | − | − | − | − | − |
Fig 19
Flight time and ETA"
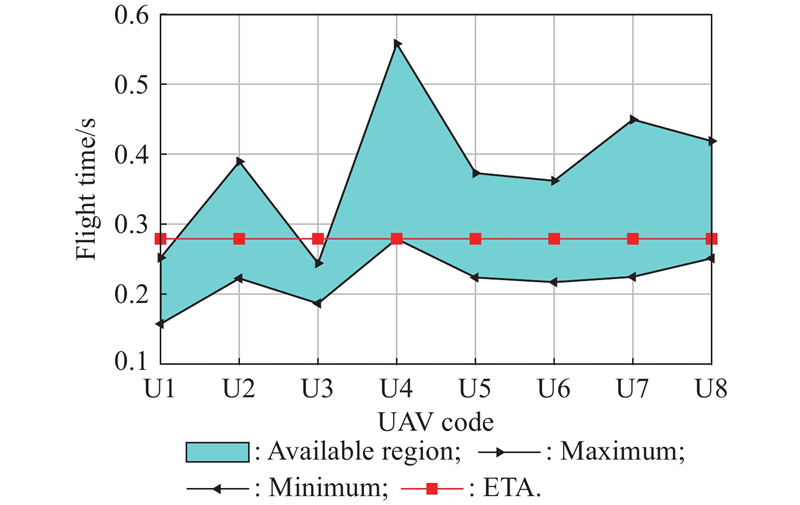
Fig 20
Actual flight speed of each UAV"
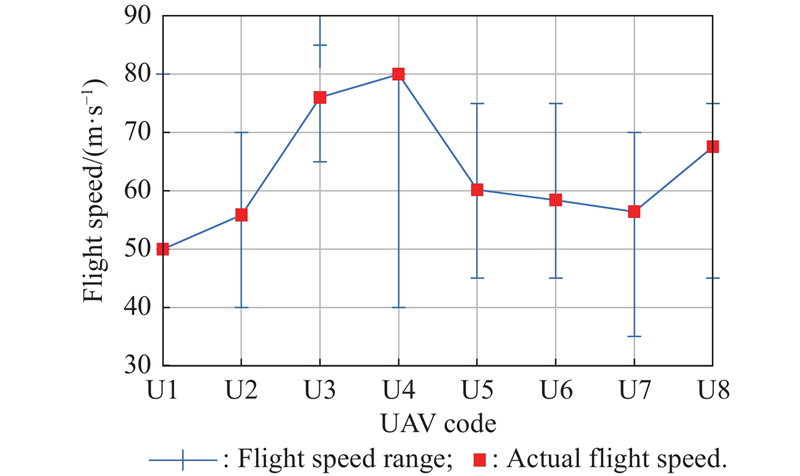
Fig 21
DPLs before rendezvous design and after rendezvous design"
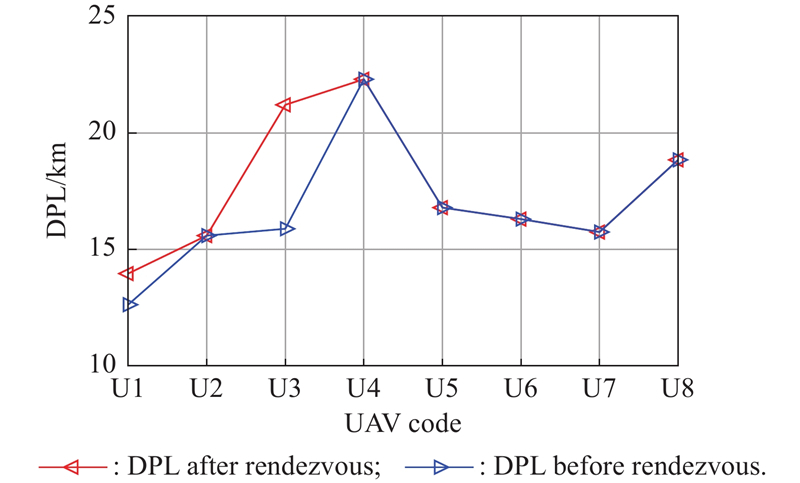

Fig 22
Flight path after maneuver"
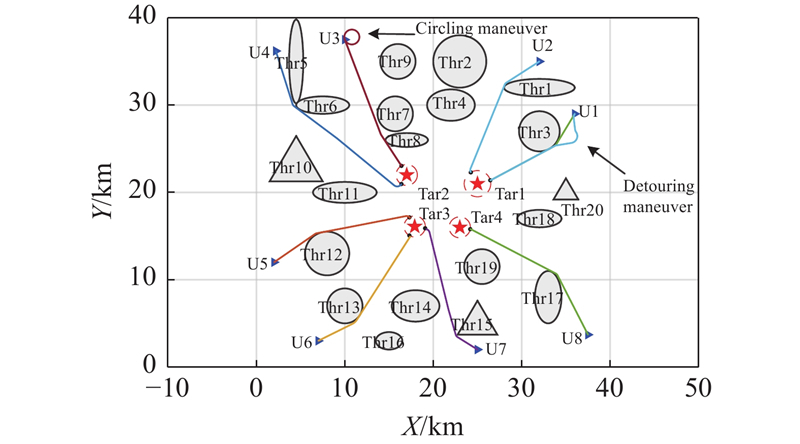
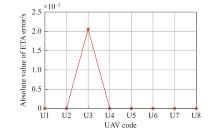
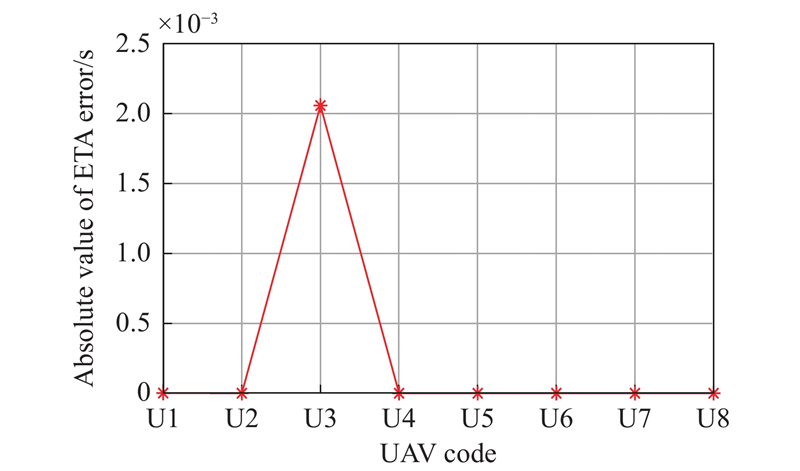
Fig 23
Absolute ETA error"
| 1 | HUANG H, WU K, WANG H F, et al Path planning of UAV low altitude penetration based on improved moth-flame optimization. Journal of Chinese Inertial Technology, 2021, 29 (2): 256- 263. |
| 2 | MA C Y, FENG Z Q, ZHENG X M Development of bionic UAVs cluster technology. Transactions of Nanjing University of Aeronautics and Astronautics, 2018, 35 (1): 1- 8. |
| 3 | KHAN A, AFTAB F, ZHANG Z S UAPM: an urgency aware packet management for disaster management using flying ad-hoc networks. China Communications, 2019, 16 (11): 167- 182. |
| 4 | YANG Q Q, GAO Y Y, GUO Y, et al. Target search path planning for naval battle field based on deep reinforcement learning. Systems Engineering and Electronics, 2022, 44(11): 3486−3495. (in Chinese) |
| 5 | YAN Z P, BAI R, CHI D N, et al Formation coordination control of multi-UUV for object searching. Computer Measurement & Control, 2013, 21 (6): 1532- 1536. |
| 6 |
JAVIER A M, BAKER S, RUS D Multi-robot formation control and object transport in dynamic environments via constrained optimization. The International Journal of Robotics Research, 2017, 36 (9): 1000- 1021.
doi: 10.1177/0278364917719333 |
| 7 |
MAZA I, CABALLERO F, CAPITAN J, et al Experimental results in multi-UAV coordination for disaster management and civil security applications. Journal of Intelligent and Robotic Systems, 2011, 61 (1/4): 563- 585.
doi: 10.1007/s10846-010-9497-5 |
| 8 | WU W N, GUAN Y Z, GUO J F, et al Research on cooperative task assignment method used to the mission SEAD with real constraints. Control and Decision, 2017, 32 (9): 1574- 1582. |
| 9 | XIANG X J, YAN C, WANG C, et al Coordination control method for fixed-wing UAV formation through deep reinforcement learning. Acta Aeronautica et Astronautica Sinica, 2021, 42 (4): 420- 433. |
| 10 | TSOURDOS A, WHITE B, SHANMUGAVEL M, et al. Cooperative path planning of unmanned aerial vehicles. ZHOU Z, WANG X. trans. Beijing: National Defence Industry Press, 2013. (in Chinese) |
| 11 | LI X Q, MA R, ZHANG S, et al Improved design of ant colony algorithm and its application in path planning. Acta Aeronautica et Astronautica Sinica, 2020, 41 (S2): 213- 219. |
| 12 | WU W H, GUO X F, ZHOU S Y Dynamic route planning based on improved constrained differential evolution algorithm. Control and Decision, 2020, 35 (10): 2381- 2390. |
| 13 | HU L, YI G X, HUANG C, et al Research on dynamic weapon target assignment based on cross-entropy. Mathematical Problems in Engineering, 2020, 2020, 1- 13. |
| 14 | SUN X L. Research on mission planning for unmanned aerial vehicles based on multi-stage path prediction. Harbin: Harbin Institute of Technology, 2015. |
| 15 | WU K, TAN S C Path planning of UAVs based on improved whale optimization algorithm. Acta Aeronautica et Astronautica Sinica, 2020, 41 (2): 107- 114. |
| 16 |
ZHEN Z Y, ZHU P, XUE Y X, et al Distributed intelligent self-organized mission planning of multi-UAV for dynamic targets cooperative search-attack. Chinese Journal of Aeronautics, 2019, 32 (12): 2706- 2716.
doi: 10.1016/j.cja.2019.05.012 |
| 17 | ZHEN Z Y, XING D J, GAO C Cooperative search-attack mission planning for multi-UAV based on intelligent self-organized algorithm. Aerospace Science & Technology, 2018, 76, 402- 411. |
| 18 | PANG Q W, HU Y J, LI W G Path planning algorithm for multi-UAVs cooperative reconnaissance on multiple targets. Journal of Chinese Inertial Technology, 2019, 27 (3): 340- 348. |
| 19 | CHEN Y B, YU J Q, MEI Y, et al Modified central force optimization (MCFO) algorithm for 3D UAV path planning. Neurocomputing, 2016, 171 (1): 878- 888. |
| 20 | LI W G, HU Y J, PANG Q W, et al Track planning of multi-UAV cooperative reconnaissance based on improved genetic algorithm. Journal of Chinese Inertial Technology, 2020, 28 (2): 248- 255. |
| 21 | LI W G, SUN S Y, LI J Z, et al UAV dynamic path planning algorithm based on segmentated optimization RRT. Systems Engineering and Electronics, 2018, 40 (8): 1786- 1793. |
| 22 | LAVALLE S M, KUFFNER J J. Randomized kino-dynamic planning. International Journal of Robotics Research, 1999, 15(5): 378−400. |
| 23 |
KOTHARI M, POSTLETHWAITE I A probabilistically robust path planning algorithm for UAVs using rapidly-exploring random trees. Journal of Intelligent and Robotic Systems, 2013, 71 (2): 231- 253.
doi: 10.1007/s10846-012-9776-4 |
| 24 | PERSSON S M, SHARF I. Sampling-based A* algorithm for robot path-planning. The International Journal of Robotics Research, 2014, 33(13): 1683−1708. |
| 25 | SINGH Y, SHARMA S, SUTTON R, et al. A constrained A* approach towards optimal path planning for an unmanned surface vehicle in a maritime environment containing dynamic obstacles and ocean currents. Ocean Engineering, 2018, 168(1): 187−201. |
| 26 |
KARAMEN S, FRAZZOLI E Sampling-based algorithms for optimal motion planning. The International Journal of Robotics Research, 2011, 30 (7): 846- 894.
doi: 10.1177/0278364911406761 |
| 27 |
JEONG I B, LEE S J, KIM J H Quick-RRT*: triangular inequality-based implementation of RRT* with improved initial solution and convergence rate. Expert Systems with Applications, 2019, 123, 82- 90.
doi: 10.1016/j.eswa.2019.01.032 |
| 28 | OH H, KIM S, SHIN H S, et al Rendezvous and standoff target tracking guidance using differential geometry. Journal of Intelligent and Robotic Systems, 2013, 69 (4): 389- 405. |
| 29 |
MANATHARA J G, GHOSE D Rendezvous of multiple UAVs with collision avoidance using consensus. Journal of Aerospace Engineering, 2012, 25 (4): 480- 489.
doi: 10.1061/(ASCE)AS.1943-5525.0000145 |
| 30 | MCLAIN T W, BEARD R W Coordination variables, coordination functions, and cooperative timing missions. Journal of Guidance, Control & Dynamics, 2005, 28 (1): 150- 161. |
| 31 | SHAN W Z, CUI N G, HUANG B, et al Multiple UAV cooperative path planning based on PSO-HJ method. Journal of Chinese Inertial Technology, 2020, 28 (1): 122- 128. |
| 32 |
DUAN H B, ZHANG X Y, WU J Max-min adaptive ant colony optimization approach to multi-UAVs coordinated trajectory replanning in dynamic and uncertain environments. Journal of Bionic Engineering, 2009, 6 (2): 161- 173.
doi: 10.1016/S1672-6529(08)60113-4 |
| 33 | SUN X L, MENG Y L, QI N M, et al Cooperative path planning for rendezvous of unmanned aerial vehicles. Robot, 2015, 37 (5): 621- 627. |
| 34 |
FOSSEN T I, PETTERSEN K Y, GALEAZZI R Line-of-sight path following for Dubins paths with adaptive sideslip compensation of drift forces. IEEE Trans. on Control Systems Technology, 2015, 23 (2): 820- 827.
doi: 10.1109/TCST.2014.2338354 |
| 35 |
DUBINS L E On curves of minimal length with a constraint on average curvature, and with prescribed initial and terminal positions and tangents. American Journal of Mathematics, 1957, 79, 497- 516.
doi: 10.2307/2372560 |
| 36 | HU L. Research on combat effectiveness algorithm of flying weapon under dynamic condition. Harbin: Harbin Institute of Technology, 2018. (in Chinese) |
| 37 | KUFFNER J J, LAVALLE S M. RRT-connect: an efficient approach to single-query path planning. Proc. of the IEEE International Conference on Robotics and Automation, 2000: 995−1001. |
| 38 | LI Y, XU D, ZHOU C Cooperation path planning of dual-robot based on self-adaptive stepsize RRT. Transactions of the Chinese Society of Agricultural Machinery, 2019, 50 (3): 358- 367. |
| [1] | Dongdong YAO, Xiaofang WANG, Hai LIN, Zhuping WANG. Leader trajectory planning method considering constraints of formation controller [J]. Journal of Systems Engineering and Electronics, 2023, 34(5): 1294-1308. |
| [2] | Liang Yang, Wanchun Chen, Xiaoming Liu, and Hao Zhou. Robust entry guidance using multi-segment linear pseudospectral model predictive control [J]. Systems Engineering and Electronics, 2017, 28(1): 103-. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||