
Journal of Systems Engineering and Electronics ›› 2023, Vol. 34 ›› Issue (3): 598-614.doi: 10.23919/JSEE.2023.000041
• COMPLEX SYSTEMS THEORY AND PRACTICE • Previous Articles
Minggang YU1,2( ), Yanjie NIU1,*(), Xueda LIU1(), Dongge ZHANG1(), Peng ZHENG1(), Ming HE1(), Ling LUO1()
), Yanjie NIU1,*(), Xueda LIU1(), Dongge ZHANG1(), Peng ZHENG1(), Ming HE1(), Ling LUO1()
Received:2022-08-29
Online:2023-06-15
Published:2023-06-30
Contact:
Yanjie NIU
E-mail:yuminggang8989@163.com;niuyanjie@126.com;834732360@qq.com;ZhangDongGeU@126.com;1203158631@163.qq.com;paper_review@126.com;717426015@qq.com
About author:Supported by:Minggang YU, Yanjie NIU, Xueda LIU, Dongge ZHANG, Peng ZHENG, Ming HE, Ling LUO. Adaptive dynamic reconfiguration mechanism of unmanned swarm topology based on an evolutionary game[J]. Journal of Systems Engineering and Electronics, 2023, 34(3): 598-614.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks

Fig 1
Framework for autonomous collaborative behavior in unmanned swarms"
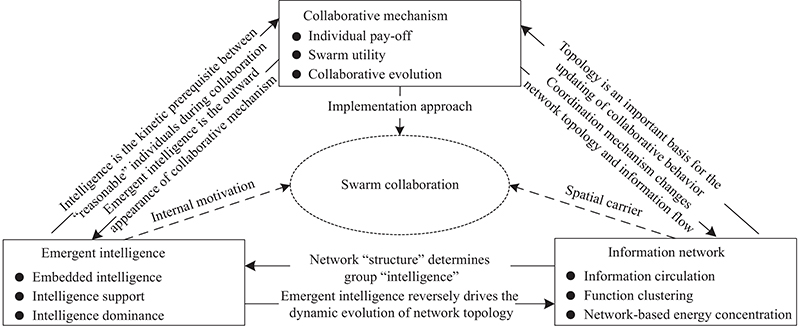

Fig 2
Diagram of unmanned swarms attacking a ground force"
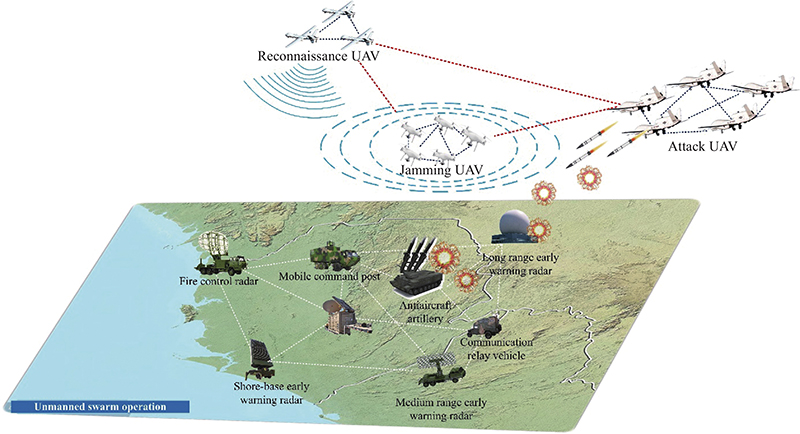
Table 1
Pay-off of multiplayer public goods evolutionary game"
| Strategy of i | Number of collaborators in i’s neighbors | |||||
| ki | ··· | | ··· | 1 | 0 | |
| C | | ··· | | ··· | | |
| D | | ··· | | ··· | | 0 |

Fig 3
Initial network of ${\boldsymbol{M}} {\boldsymbol{=}} {\boldsymbol{4}}$ , ${{\boldsymbol{m}}_{\boldsymbol{0}}} {\boldsymbol{=}} {\boldsymbol{3}}$ "
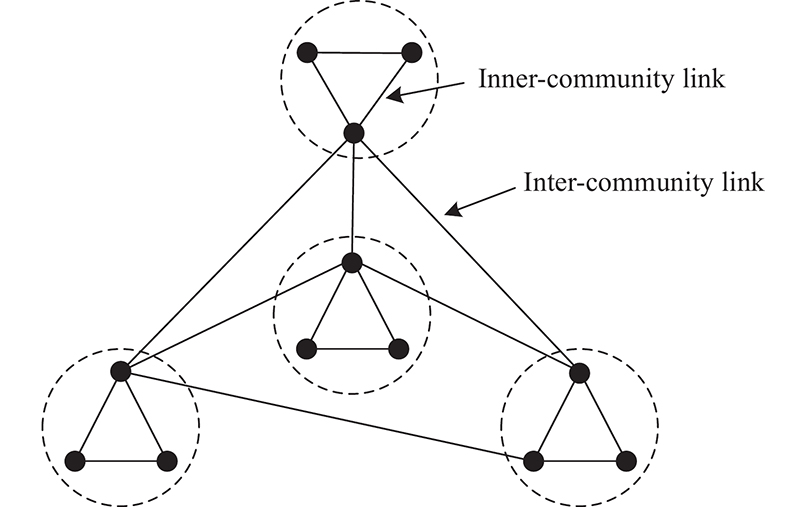

Fig 4
Simulation interface and generated final network"
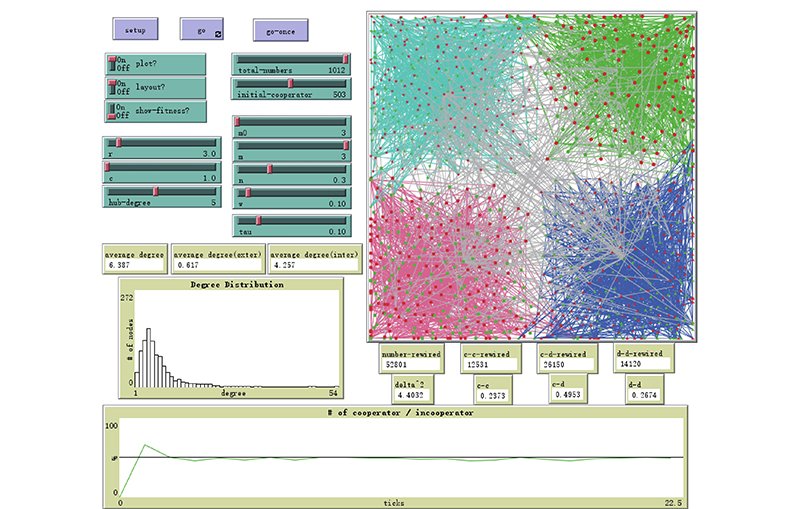
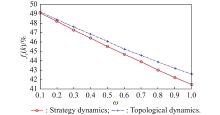
Fig 5
Comparison of the swarm cooperation level between strategy dynamics and topological dynamics"
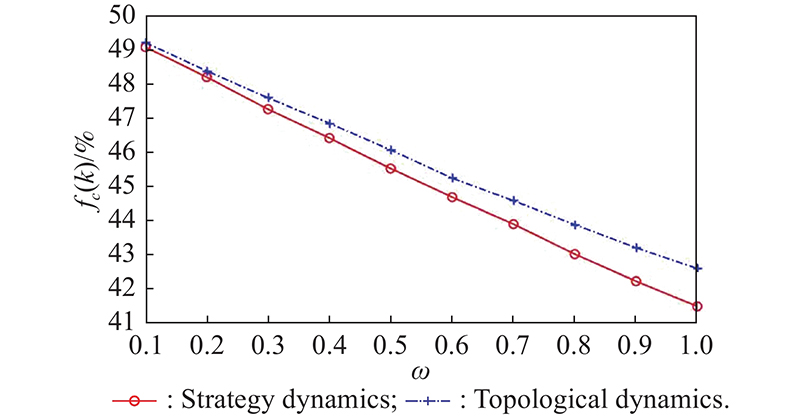
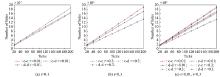
Fig 6
Evolution of the number of different types of edges"
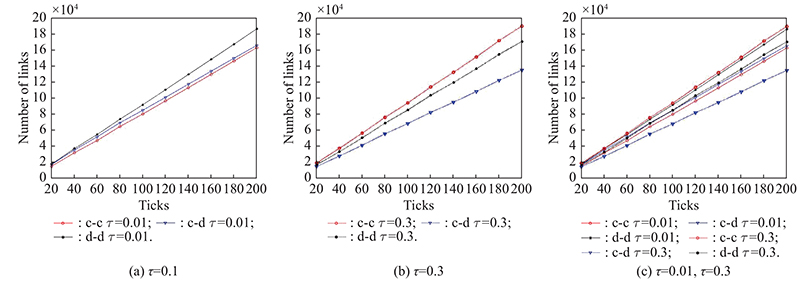
Fig 7
Relationship between the cooperation level and the cost and benefit coefficient"
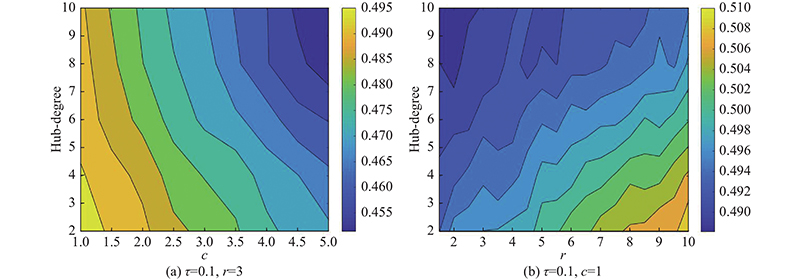
Fig 8
Coherent effects of cost, benefit coefficient and adjustment rate on the level of cooperation"
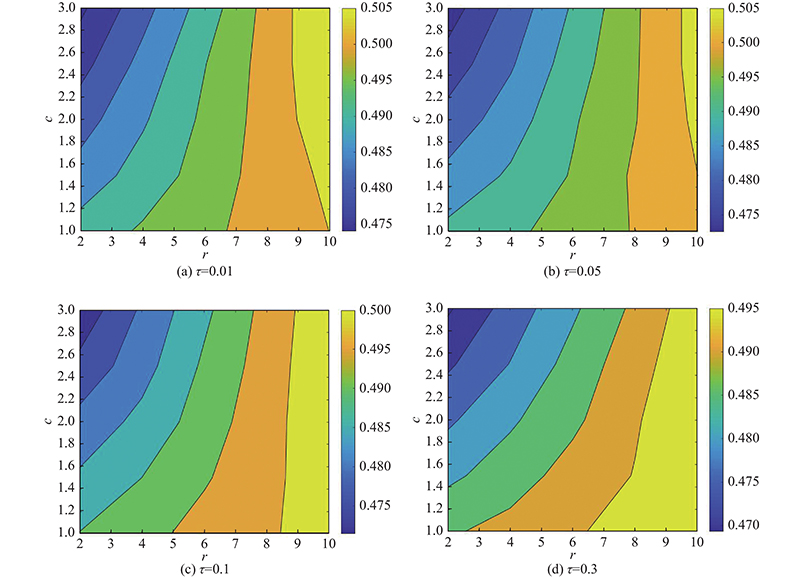
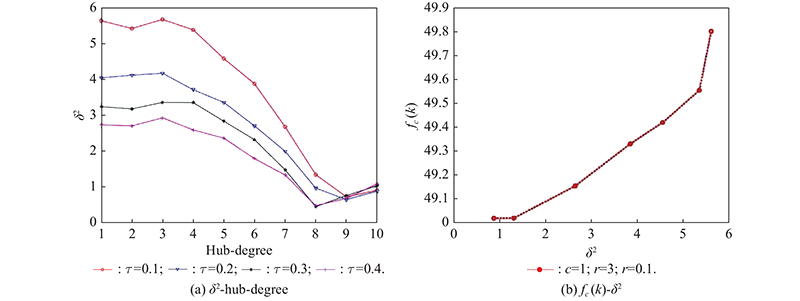
Fig 9
Normalized degree distribution variance of swarm networks"
| 1 | KARPOWICZ J Warfare use of unmanned aerial vehicles. Safety & Defense, 2021, 7 (2): 51- 64. |
| 2 | FAN J R, LI D G, LI R P, et al Analysis on MAV/UAV cooperative combat based on complex network. Defence Technology, 2020, 16 (1): 150- 157. |
| 3 | NOWAK M A, SIGMUND K Evolution of indirect reciprocity. Nature, 2005, 437 (6685): 1291- 1298. |
| 4 |
LIEBERMAN E, HAUERT C, NOWAK M A Evolutionary dynamics on graphs. Nature, 2005, 433 (7023): 312- 316.
doi: 10.1038/nature03204 |
| 5 |
NOWAK M A Five rules for the evolution of cooperation. Science, 2006, 314 (5805): 1560- 1563.
doi: 10.1126/science.1133755 |
| 6 |
SMITH J M, PRICE G R The logic of animal conflict. Nature, 1973, 246 (5427): 15- 18.
doi: 10.1038/246015a0 |
| 7 |
NOWAK M A, MAY R M Evolutionary games and spatial chaos. Nature, 1992, 359 (6398): 826- 829.
doi: 10.1038/359826a0 |
| 8 |
NOWAK M A, MAY R M The spatial dilemmas of evolution. International Journal of Bifurcation Chaos, 1993, 3 (1): 35- 78.
doi: 10.1142/S0218127493000040 |
| 9 |
HAUERT C, DE MONTE S, HOFBAUER J, et al Volunteering as red queen mechanism for cooperation in public goods games. Science, 2002, 296 (5570): 1129- 1132.
doi: 10.1126/science.1070582 |
| 10 |
OHTSUKI H, HAUERT C, LIEBERMAN E, et al A simple rule for the evolution of cooperation on graphs and social networks. Nature, 2006, 441 (7092): 502- 505.
doi: 10.1038/nature04605 |
| 11 | FU F, NOWAK M A, HAUERT C Invasion and expansion of cooperators in lattice populations: prisoner’s dilemma vs. snowdrift games. Journal of Theoretical Biology, 2010, 266 (3): 358- 366. |
| 12 |
NOWAK M A, TARNITA C E, ANTAL T, et al Evolutionary dynamics in structured populations. Philosophical Transactions of the Royal Society B, 2010, 365 (1537): 19- 30.
doi: 10.1098/rstb.2009.0215 |
| 13 | PENA J, WU B, ARRANZ J, et al Evolutionary games of multiplayer cooperation on graphs. PLOS Computational Biology, 2016, 12 (8): 1- 15. |
| 14 |
JONES S L, LEIPONEN A, VASUDEVA G The evolution of cooperation in the face of conflict: evidence from the innovation ecosystem for mobile telecom standards development. Strategic Management Journal, 2021, 42 (4): 710- 740.
doi: 10.1002/smj.3244 |
| 15 | JOSEF T, ANDREAS P, KRISHNENDU C, et al Population structure determines the tradeoff between fixation probability and fixation time. Communications Biology, 2019, 2, 138- 145. |
| 16 |
ALLEN B, LIPPNER G, NOWAK M A Evolutionary games on isothermal graphs. Nature Communications, 2019, 10 (1): 1- 9.
doi: 10.1038/s41467-018-07882-8 |
| 17 |
SANTOS F C, SANTOS M D, PACHECO J M Social diversity promotes the emergence of cooperation in public goods games. Nature, 2008, 454 (7201): 213- 216.
doi: 10.1038/nature06940 |
| 18 |
SANTOS F C, PACHECO J M Scale-free networks provide a unifying framework for the emergence of cooperation. Physical Review Letters, 2005, 95 (9): 098104.
doi: 10.1103/PhysRevLett.95.098104 |
| 19 |
SANTOS F C, PACHECO J M A new route to the evolution of cooperation. Journal of Evolutionary Biology, 2006, 19 (3): 726- 733.
doi: 10.1111/j.1420-9101.2005.01063.x |
| 20 |
SANTOS F C, PACHECO J M, LENAERTS T Evolutionary dynamics of social dilemmas in structured heterogeneous populations. Proceedings of the National Academy of Sciences, 2006, 103 (9): 3490- 3494.
doi: 10.1073/pnas.0508201103 |
| 21 |
SANTOS F C, RODRIGUES J F, PACHECO J M Graph topology plays a determinant role in the evolution of cooperation. Proceedings of the Royal Society B: Biological Sciences, 2006, 273 (1582): 51- 55.
doi: 10.1098/rspb.2005.3272 |
| 22 |
ZHOU L, WU B, DU J M, et al Aspiration dynamics generate robust predictions in heterogeneous populations. Nature Communications, 2021, 12 (1): 1- 9.
doi: 10.1038/s41467-020-20314-w |
| 23 |
MAYER J, OBERMULLER M, DENK J, et al Snowdrift game induces pattern formation in systems of self-propelled particles. Physical Review E, 2021, 104 (4): 044408.
doi: 10.1103/PhysRevE.104.044408 |
| 24 |
OGBO N B, ELRAGIG A, HAN T A Evolution of coordination in pairwise and multi-player interactions via prior commitments. Adaptive Behavior, 2022, 30 (3): 257- 277.
doi: 10.1177/1059712321993166 |
| 25 |
WU B, ALTROCK P M, WANG L, et al Universality of weak selection. Physical Review E, 2010, 82 (4): 046106.
doi: 10.1103/PhysRevE.82.046106 |
| 26 |
DU J M, WU B, ALTROCK P M, et al Aspiration dynamics of multi-player games in finite populations. Journal of the Royal Society Interface, 2014, 11 (94): 20140077.
doi: 10.1098/rsif.2014.0077 |
| 27 |
GOVAERT A, RAMAZI P, CAO M Rationality, imitation, and rational imitation in spatial public goods games. IEEE Trans. on Control of Network Systems, 2021, 8 (3): 1324- 1335.
doi: 10.1109/TCNS.2021.3065655 |
| 28 |
LEE K H, CHAN C H, HUI P M, et al Cooperation in N-person evolutionary snowdrift game in scale-free Barabasi–Albert networks. Physica A: Statistical Mechanics and its Applications, 2008, 387 (22): 5602- 5608.
doi: 10.1016/j.physa.2008.05.045 |
| 29 | LUO Q, LIU L J, CHEN X J. Evolutionary dynamics of cooperation in the N-person stag hunt game. Physica D: Nonlinear Phenomena, 2021, 424: 132943. |
| 30 |
FENG Z, NIU W J Hybrid artificial neural network and cooperation search algorithm for nonlinear river flow time series forecasting in humid and semi-humid regions. Knowledge-Based Systems, 2021, 211, 106580.
doi: 10.1016/j.knosys.2020.106580 |
| 31 | TAN S L, LV J H. Games and evolutionary dynamics on complex networks. Beijing: Higher Education Press, 2019. (in Chinese) |
| 32 |
TARNITA C E The ecology and evolution of social behavior in microbes. Journal of Experimental Biology, 2017, 220 (1): 18- 24.
doi: 10.1242/jeb.145631 |
| 33 |
CARATTINI S, LEVIN S, TAVONI A Cooperation in the climate commons. Review of Environmental Economics and Policy, 2019, 13 (2): 227- 247.
doi: 10.1093/reep/rez009 |
| 34 |
SU Q, ZHOU L, WANG L Evolutionary multiplayer games on graphs with edge diversity. PLoS Computational Biology, 2019, 15 (4): e1006947.
doi: 10.1371/journal.pcbi.1006947 |
| 35 |
SU Q, LI A, WANG L, et al Spatial reciprocity in the evolution of cooperation. Proceedings of the Royal Society B: Biological Sciences, 2019, 286 (1900): 20190041.
doi: 10.1098/rspb.2019.0041 |
| 36 | YU M G, HE M, MA Z Y, et al. Cooperative evolution mechanism of unmanned swarmss within the framework of public goods game. Mathematical Problems in Engineering, 2020(1): 1−12. |
| 37 | YU M G, HE M, ZHANG D G, et al An approach to coordinated control of structured unmanned swarmss based on evolutionary game. Proc. of the 3rd IEEE International Conference on Unmanned Systems, 2020, 1- 13. |
| 38 | YU M G, CHEN J, HE M, et al. Cooperative mechanism of unmanned cluster in community network based on evolutionary game. Scientia Sinica Technologica, 2023, 53(2): 221−242. |
| 39 | YU M G, ZHANG D G, KANG K, et al Cooperative evolution mechanism of unmanned swarmss based on multi public goods evolutionary game. Systems Engineering and Electronics, 2020, 42 (12): 2787- 2794. |
| 40 | YU M G, HE M, ZHANG D G, et al Advantages of unmanned swarmss strategy based on multi-player public goods evolutionary game. Systems Engineering and Electronics, 2021, 43 (9): 2553- 2561. |
| 41 | YU M G, HE M, ZHANG D G, et al. Cooperative control method of structured unmanned cluster based on evolutionary game. Fire Control & Command Control, 2021, 46(10): 24−31. (in Chinese) |
| 42 | LIU X D, HE M, YU M G Cooperative application of UAV swarms based on evolutionary game. Journal of Command and Control, 2021, 7 (2): 167- 173. |
| 43 | FINLAN A. The shape of warfare to come: a Swedish perspective 2020–2045. Defense & Security Analysis, 2021, 37(4): 472−491. |
| 44 | DoD. Unmanned systems integrated roadmap FY2017-2042. Washington DC: Office of the Secretary of Defense, 2013. |
| 45 |
HATANO Y, MESBAHI M Agreement over random networks. IEEE Trans. on Automatic Control, 2005, 50 (11): 1867- 1872.
doi: 10.1109/TAC.2005.858670 |
| 46 |
LI C, MAINI P K An evolving network model with community structure. Journal of Physics A: Mathematical and General, 2005, 38 (45): 9741.
doi: 10.1088/0305-4470/38/45/002 |
| 47 | ZHANG J L, ZHU Y Y, CHEN Z Q Evolutionary game dynamics of multiagent systems on multiple community networks. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2020, 50 (11): 4513- 4529. |
| 48 | GAO Y, LI D S Consensus evaluation method of multi-ground-target threat for unmanned aerial vehicle swarm based on heterogeneous group decision making. Computers & Electrical Engineering, 2019, 74, 223- 232. |
| 49 |
SZOLNOKI A, CHEN X Cooperation and competition between pair and multi-player social games in spatial populations. Scientific Reports, 2021, 11 (1): 1- 9.
doi: 10.1038/s41598-020-79139-8 |
| 50 | GARRO A, MUHLHUSER M, TUNDIS A, et al Intelligent agents: multi-agent systems. Encyclopedia of Bioinformatics and Computational Biology, 2019, 1, 315- 320. |
| 51 | HOLLAND J H. Hidden order: how adaptation builds complexity. USA: Arts & Licensing International Inc, 1995. |
| 52 |
LI P P, KE J, LIN Z, et al Collaborative behavior in evolutionary snowdrift games with the unconditional imitation rule on regular lattices. Physical Review E, 2012, 85 (2): 021111.
doi: 10.1103/PhysRevE.85.021111 |
| 53 |
TAYLOR P D, JONKRT L B Evolutionary stable strategies and game dynamics. Mathematical Biosciences, 1978, 40 (1/2): 145- 156.
doi: 10.1016/0025-5564(78)90077-9 |
| 54 | SZABO G, TOKE C Evolutionary prisoner’s dilemma game on a square lattice. Physical Review E, 1998, 58 (1): 69- 73. |
| 55 | ALBERT L B, REKA A, JEONG H. Mean-field theory for scale-free random networks. Physica A: Statistical Mechanics and its Applications, 1999, 272(1): 173−187. |
| 56 | TARNITA C E, OHTSUKI H, ANTAL T, et al. Strategy selection in structured populations. Journal of Theoretical Biology, 2009, 259(3): 570−581. |
| 57 | WANG X J, XIA K Extended average abundance function of multi-player snowdrift evolutionary game under aspiration driven rule. Systems Engineering—Theory & Practice, 2019, 39 (5): 1128- 1137. |
| [1] | Ye MA, Tianqing CHANG, Wenhui FAN. A single-task and multi-decision evolutionary game model based on multi-agent reinforcement learning [J]. Journal of Systems Engineering and Electronics, 2021, 32(3): 642-657. |
| [2] | Ming ZHANG, Jianjun ZHU, Hehua WANG. Evolutionary game analysis of problem processing mechanism in new collaboration [J]. Journal of Systems Engineering and Electronics, 2021, 32(1): 136-150. |
| [3] | Zhou Min, Deng Feiqi & Wu Sai. Coordination game model of co-opetition relationship on cluster supply chains [J]. Journal of Systems Engineering and Electronics, 2008, 19(3): 499-506. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||