
Journal of Systems Engineering and Electronics ›› 2023, Vol. 34 ›› Issue (1): 172-184.doi: 10.23919/JSEE.2023.000026
• CONTROL THEORY AND APPLICATION • Previous Articles Next Articles
Yijie ZHANG1( ), Jiongqi WANG1(), Bowen HOU1(), Dayi WANG1,2(), Yuyun CHEN1,3,*()
), Jiongqi WANG1(), Bowen HOU1(), Dayi WANG1,2(), Yuyun CHEN1,3,*()
Received:2021-10-09
Online:2023-02-18
Published:2023-03-03
Contact:
Yuyun CHEN
E-mail:zyijie0616@163.com;wjq_gfkd@163.com;houbowen95@126.com;dayiwang@163.com;kasineya@sina.com
About author:Supported by:Yijie ZHANG, Jiongqi WANG, Bowen HOU, Dayi WANG, Yuyun CHEN. Optimal maneuvering strategy of spacecraft evasion based on angles-only measurement and observability analysis[J]. Journal of Systems Engineering and Electronics, 2023, 34(1): 172-184.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks

Fig 1
Orbital coordinates system"
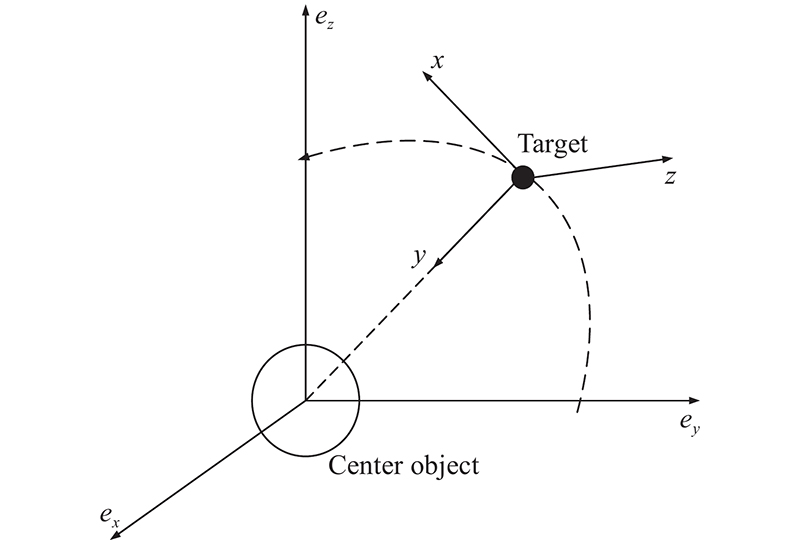
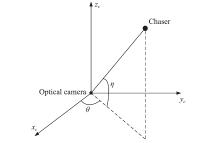
Fig 2
Optical camera measurement coordinate system"
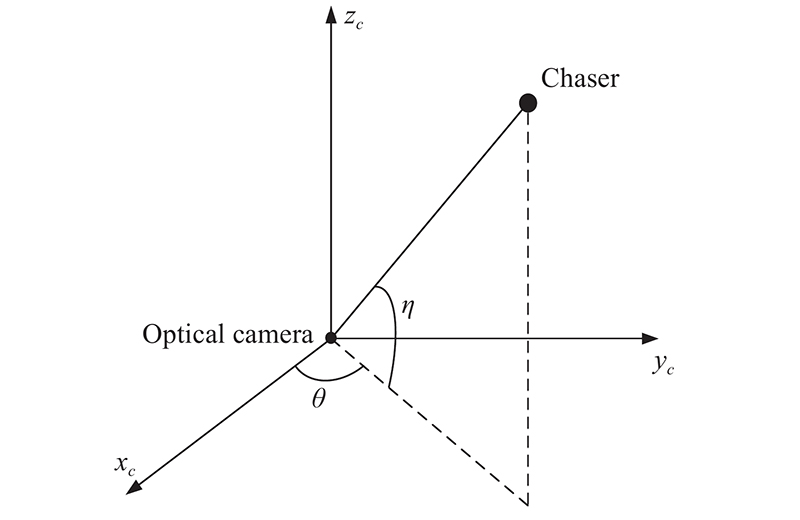

Fig 3
Schematic diagram of dangerous rendezvous between the target and the chaser"
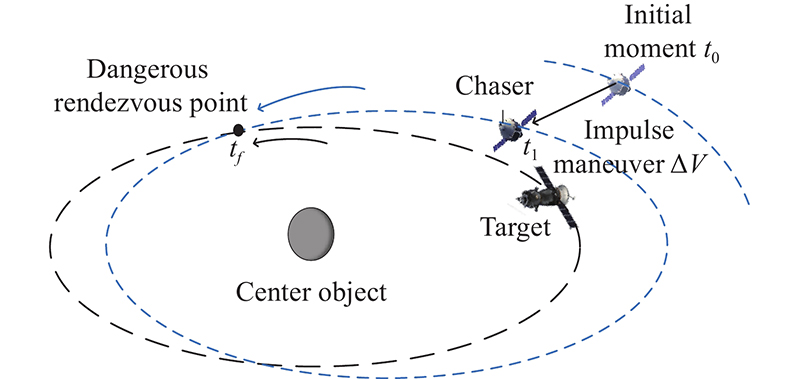
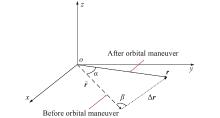
Fig 4
Schematic diagram of impulse maneuver increasing relative distance information"
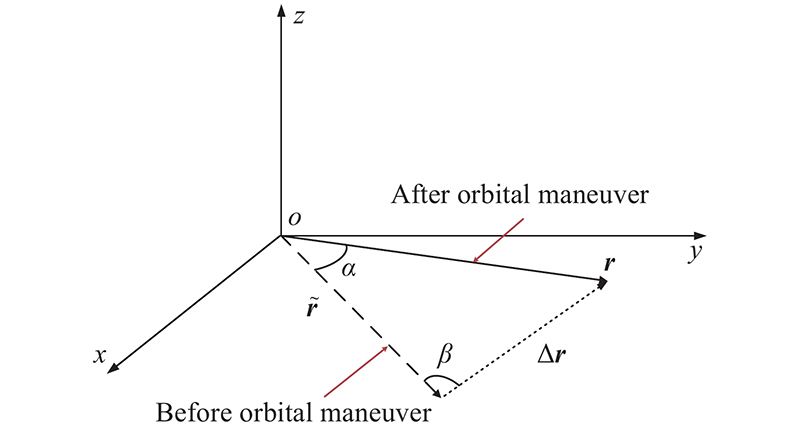
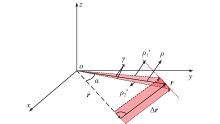
Fig 5
Schematic diagram of relative distance error"
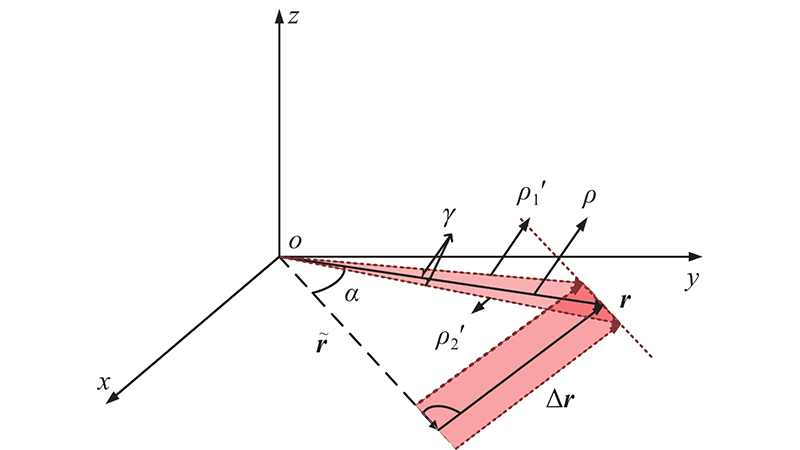
Fig 6
Relative distance change without maneuvering"
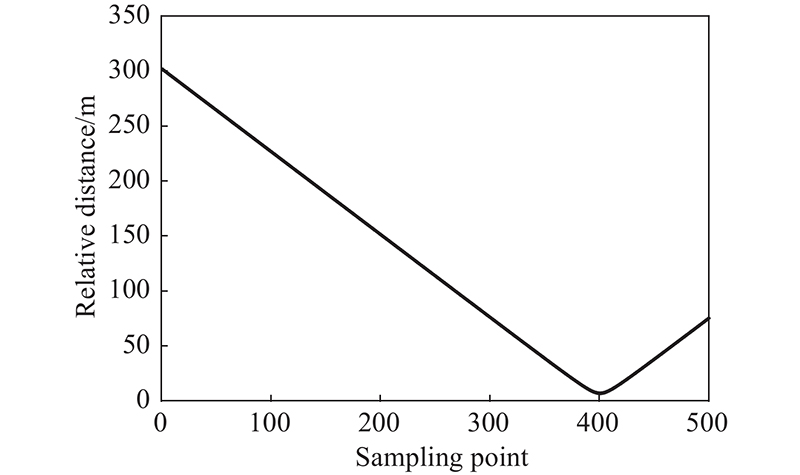
Fig 7
Influence of maneuvering direction on the observability degree for relative position in the orbital plane"
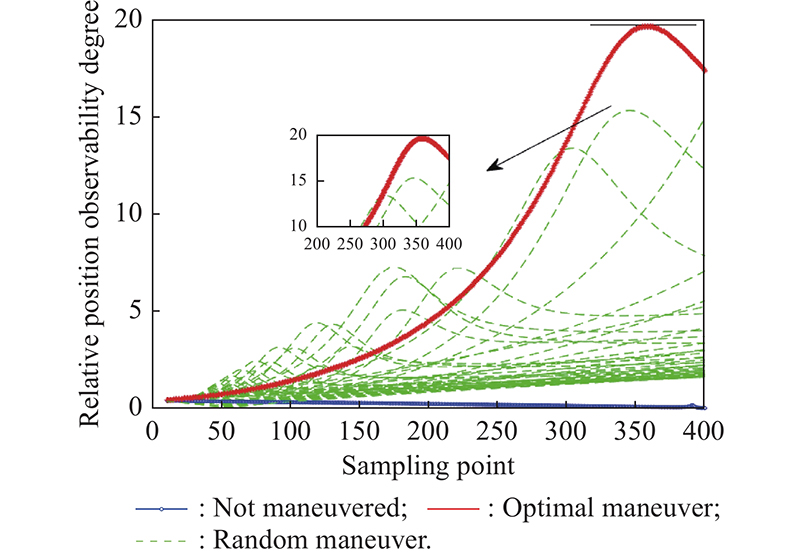
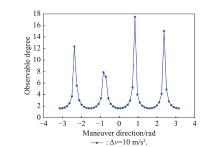
Fig 8
Influence of maneuvering direction on an observability degree at evasion terminal"
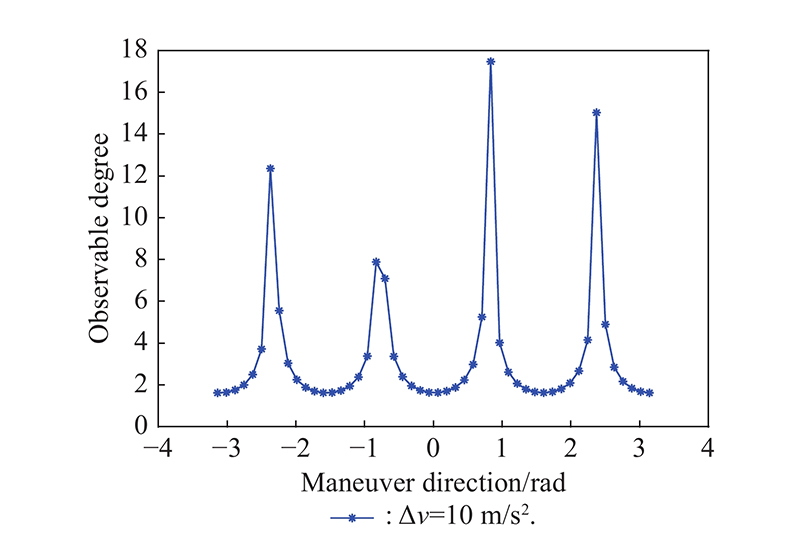
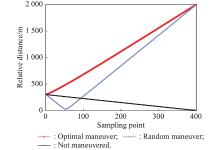
Fig 9
Relative distance of two spacecraft under optimal maneuvering, non-maneuvering, and random maneuvering"
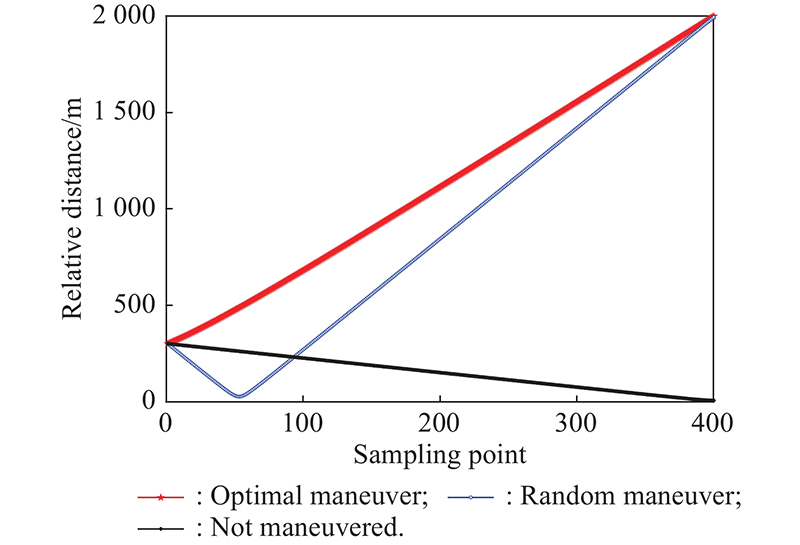
Fig 10
True relative distance of two spacecraft under optimal maneuvering, non-maneuvering, and random maneuvering"
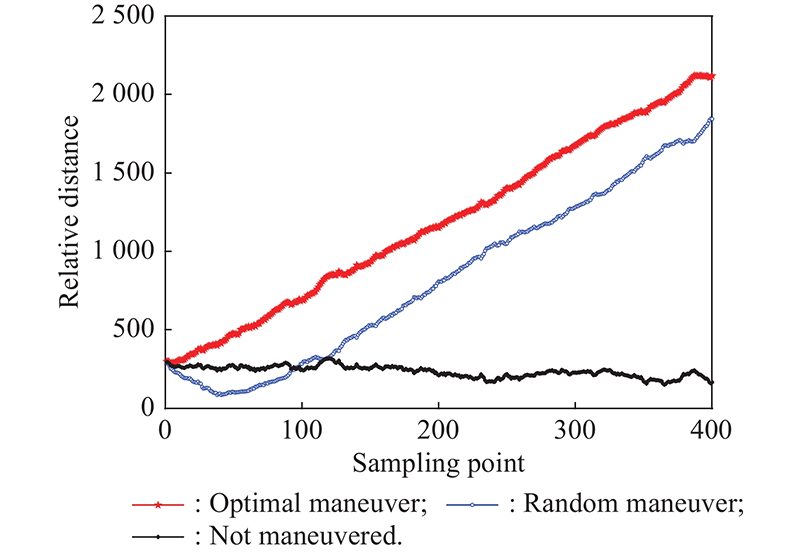
Fig 11
Comparison of state estimation deviation of non-maneuvering, optimal maneuvering, and random maneuvering"
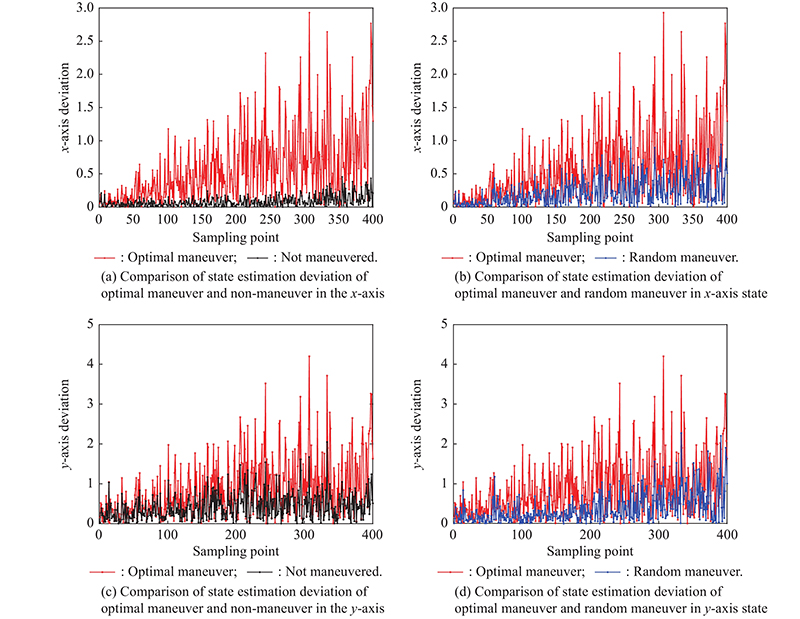
Table 1
Relative state estimation error on evasion terminal m·s?2 "
| RMSE | Maneuver | ||
| Non | Optimal | Random | |
| x-axis | 0.03191 | 2.3350 | 0.8941 |
| y-axis | 0.4189 | 2.3642 | 1.9586 |
Fig 12
Relationship between maneuver magnitude and relative position’s observability degree"
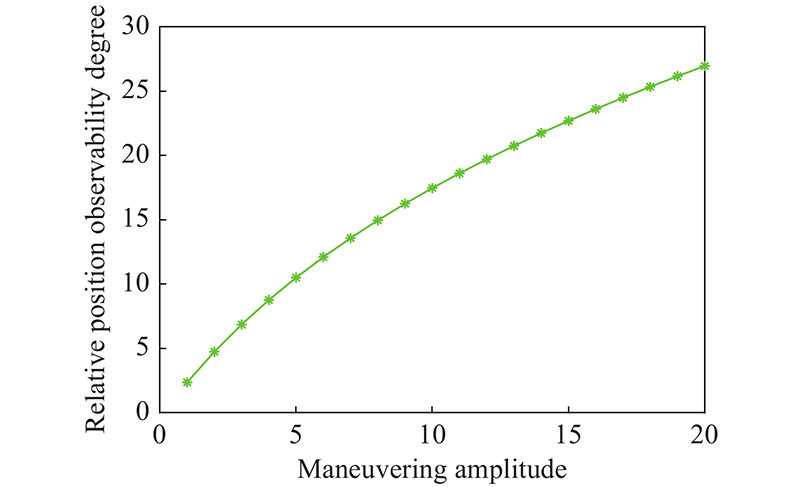
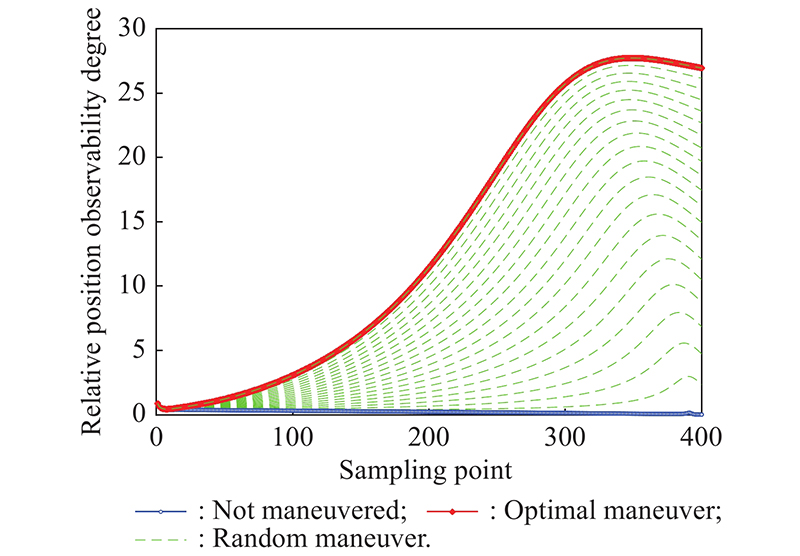
Fig 13
Influence of the magnitude of non-maneuver, optimal maneuver and random maneuver on the observability degree of re-lative position"
| 1 |
NISHIDA S I, KAWAMOTO S Strategy for capturing of a tumbling space debris. Acta Astronautica, 2011, 68 (1/2): 113- 120.
doi: 10.1016/j.actaastro.2010.06.045 |
| 2 | KOMANDURI A S Guidance and control of a spacecraft to rendevous and dock with a non-cooperative target. Gottingen: Cuvillier Verlag, 2011. |
| 3 | GUO H R. What we need to know about StarLink. https://zhuanlan.zhihu.com/p/91352915. (in Chinese) |
| 4 | BAI X Z, CHEN L, ZHANG Y, et al Survey on collision assessment and warning techniques for space object. Journal of Astronautics, 2013, 34 (8): 1027- 1039. |
| 5 |
D’AMICO S, ARDAENS J S, GAIAS G, et al Noncooperative rendezvous using angles-only optical navigation: system design and flight results. Journal of Guidance, Control, and Dynamics, 2013, 36 (6): 1576- 1595.
doi: 10.2514/1.59236 |
| 6 |
YIN F, CHOU W S, WU Y, et al Sparse unorganized point cloud based relative pose estimation for uncooperative space target. Sensors, 2018, 18 (4): 1009.
doi: 10.3390/s18041009 |
| 7 | KRUGER J, D ’AMICO S Autonomous angles-only multitarget tracking for spacecraft swarms. Acta Astronautica, 2021, 189 (6): 514- 529. |
| 8 | PATERA R P. General method for calculating satellite collision probability. Journal of Guidance, Control, and Dyna-mics. 2001, 24(4): 716–722. |
| 9 | PATERA R P Satellite collision probability for nonlinear relative motion. Journal of Guidance, Control and Dynamics, 2003, 26 (5): 728733. |
| 10 |
PATERA R P, PETERSON G E Space vehicle maneuver method to lower collision risk to an acceptable level. Journal of Guidance, Control, and Dynamics, 2003, 26 (2): 233- 237.
doi: 10.2514/2.5063 |
| 11 | WANG H, LI H Y, TANG G J Collision probability based optimal collision avoidance maneuver in rendezvous and docking. Journal of Astronautics, 2008, 29 (1): 220- 223. |
| 12 | SU F, LIU J, ZHANG Y, et al Analysis of optimal impulse for in-plane collision avoidance maneuver. Systems Engineering and Electronics, 2018, 40 (12): 2782- 2789. |
| 13 |
PONTANI M, CONWAY B A Numerical solution of the three-dimensional orbital pursuit-evasion game. Journal of Guidance, Control, and Dynamics, 2009, 32 (2): 474- 487.
doi: 10.2514/1.37962 |
| 14 |
JAGAT A, SINCLAIR A J Nonlinear control for spacecraft pursuit-evasion game using the state-dependent Riccati equation method. IEEE Trans. on Aerospace and Electronic Systems, 2017, 53 (6): 3032- 3042.
doi: 10.1109/TAES.2017.2725498 |
| 15 |
LI Z Y, ZHU H, LUO Y Z An escape strategy in orbital pursuit-evasion games with incomplete information. Science China Technological Sciences, 2021, 64 (3): 559- 570.
doi: 10.1007/s11431-020-1662-0 |
| 16 | YU D T, WANG H, ZHOW W M Anti-rendezvous evasive maneuver method considering space geometrical relationship. Journal of National University of Defense Technology, 2016, 38 (6): 89- 94. |
| 17 | YU D T, WANG H, GUO S, et al Analytical approach for orbital evasion with space geometry considered. International Journal of Aerospace Engineering, 2017, 2017, 4164260. |
| 18 | YU D T, LUO Y Z, JIANG Z C, et al Multi-objective evolutionary optimization of evasive maneuvers including observability performance. Proc. of the IEEE Congress on Evolutionary Computation, 2015, 603- 610. |
| 19 | HAM F M, BROWN R G Observability, eigenvalues and Kalman filitering. IEEE Trans. on Aerospace and Electronic Systems, 1983, (2): 269- 273. |
| 20 | CHENG X H, WAN D J, ZHONG X Study on observability and its degree of strapdown inertial navigation system. Journal of Southeast University, 1997, 27 (6): 6- 11. |
| 21 | ZHOU B C, CHENG X H, LIU D J Analysis method of observable degree based on spectral decomposition in SINS transfer alignment. Journal of Chinese Inertial Technology, 2010, 18 (5): 518- 522. |
| 22 |
GE Q B, MA J Y, CHEN S D, et al Observable degree analysis to match estimation performance for wireless tracking networks. Asian Journal of Control, 2017, 19 (4): 1259- 1270.
doi: 10.1002/asjc.1386 |
| 23 |
GE Q B, TANG S S, WANG M M, et al Improved nonlinear observable degree analysis using data fusion. Applied Mathematics and Computation, 2021, 392, 125613.
doi: 10.1016/j.amc.2020.125613 |
| 24 | VALLADO D A. Evaluating gooding angles-only orbit determination of space based space surveillance measurements. https://www.researchgate.net/publication/228994563_Evaluating_Gooding_Angles-only_Orbit_Determination_of_Space_Based_Space_Surveillance_Measurements. |
| 25 |
WOFFINDEN D C, GELLER D K Optimal orbital rendezvous maneuvering for angles-only navigation. Journal of Guidance, Control, and Dynamics, 2009, 32 (4): 1382- 1387.
doi: 10.2514/1.45006 |
| 26 | WASIM M, ALI A Airship aerodynamic model estimation using unscented Kalman filter. Journal of Systems Engineering and Electronics, 2020, 31 (6): 1318- 1329. |
| 27 |
ZUO L, NIU R X, VARSHNEY P K Conditional posterior Cramer-Rao lower bounds for nonlinear sequential Bayesian estimation. IEEE Trans. on Signal Processing, 2011, 59 (1): 1- 14.
doi: 10.1109/TSP.2010.2080268 |
| 28 |
LIU C Y, SHUI P L, WEI G, et al Modified unscented Kalman filter using modified filter gain and variance scale factor for highly maneuvering target tracking. Journal of Systems Engineering and Electronics, 2014, 25 (3): 380- 385.
doi: 10.1109/JSEE.2014.00043 |
| 29 | HOU B W, WANG D Y, WANG J Q, et al. Optimal maneuvering for autonomous relative navigation using monocular camera sequential images. Journal of Guidance, Control and Dynamics, 2021, 44(11): 1947–1960. |
| [1] | Haowei ZHANG, Junwei XIE, Junpeng SHI, Zhaojian ZHANG. Antenna selection in MIMO radar with collocated antennas [J]. Journal of Systems Engineering and Electronics, 2019, 30(6): 1119-1131. |
| [2] | Guo Lei, Tang Bin, Liu Gang & Xiao Fei. Posterior Cramer-Rao lower bounds for multitarget bearings-only tracking [J]. Journal of Systems Engineering and Electronics, 2008, 19(6): 1127-1132. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||