
Journal of Systems Engineering and Electronics ›› 2022, Vol. 33 ›› Issue (6): 1309-1319.doi: 10.23919/JSEE.2022.000150
• CONTROL THEORY AND APPLICATION • Previous Articles
Pu YANG( ), Xukai HU(), Zixin WANG(), Zhiqing ZHANG()
), Xukai HU(), Zixin WANG(), Zhiqing ZHANG()
Received:2021-04-13
Online:2022-12-18
Published:2022-12-24
Contact:
Pu YANG
E-mail:ppyang@nuaa.edu.cn;xkhu@nuaa.edu.cn;wangzixin@nuaa.edu.cn;zhiqingzhang@nuaa.edu.cn
About author:Supported by:Pu YANG, Xukai HU, Zixin WANG, Zhiqing ZHANG. Sliding mode fault tolerant consensus control for multi-agent systems based on super-twisting observer[J]. Journal of Systems Engineering and Electronics, 2022, 33(6): 1309-1319.
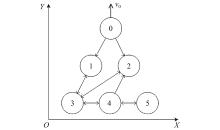
Fig 1
MAS communication topology network"
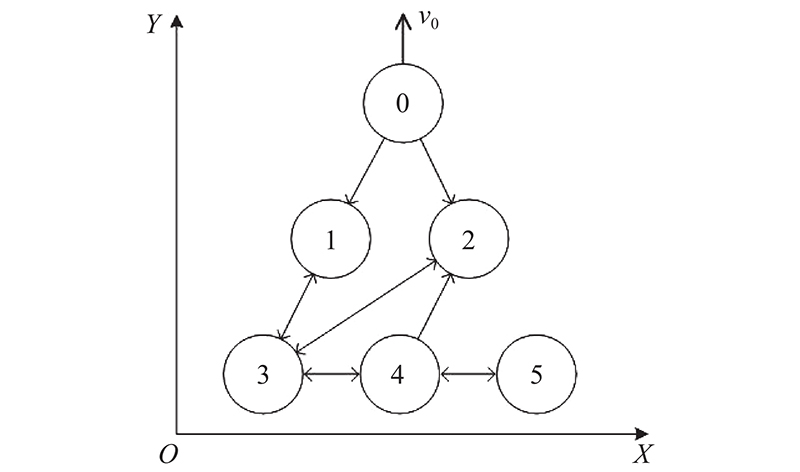
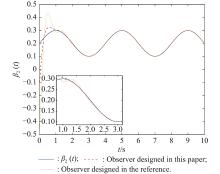
Fig 2
Estimations of β2(t) by two observers "
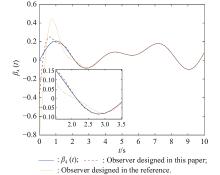
Fig 3
Estimations of β4(t) by two observers "
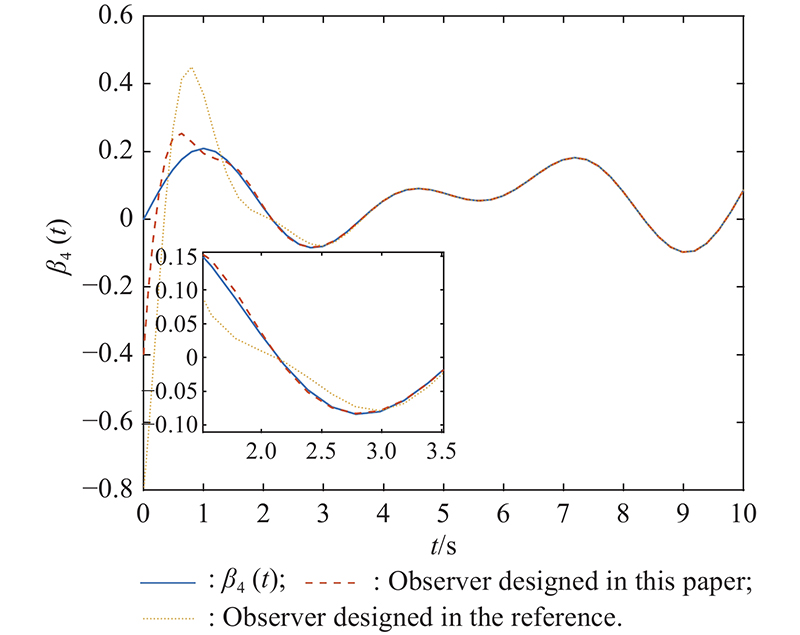
Table 1
Estimated time of faults in Fig. 2 and Fig. 3 s "
| Method | Estimated time of | Estimated time of |
| Observer in this paper | 1.372 | 1.978 |
| Observer in [ | 2.347 | 3.164 |
Fig 4
Position tracking of leader and followers"
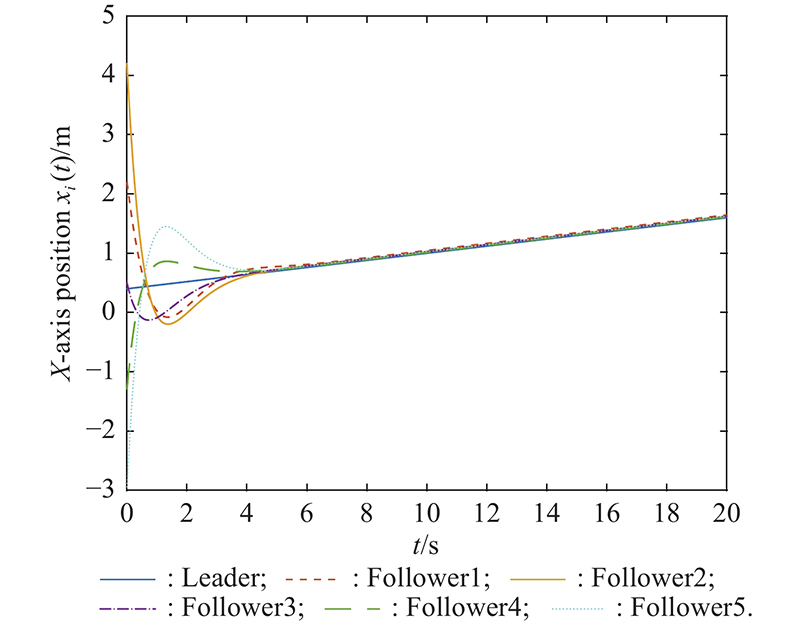
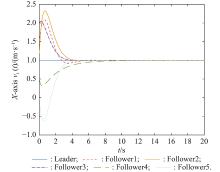
Fig 5
Velocity tracking of leader and followers"
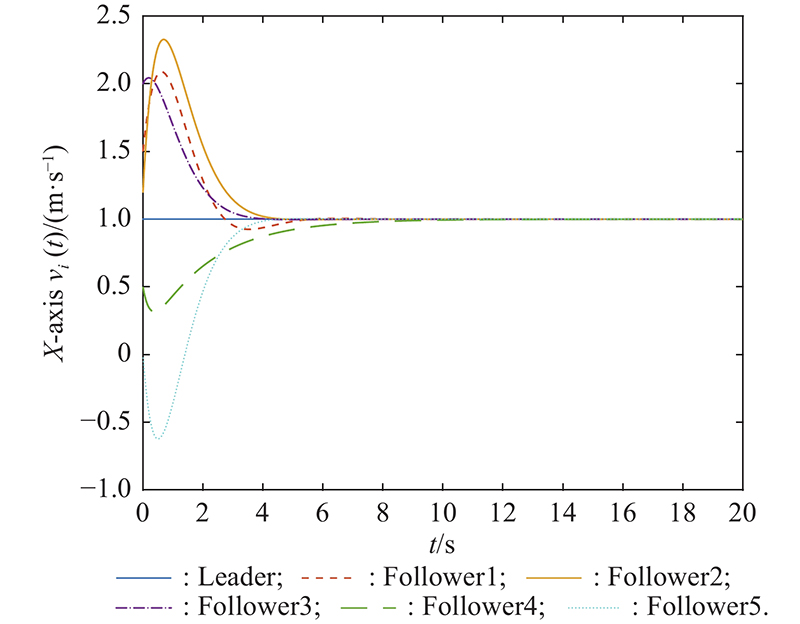
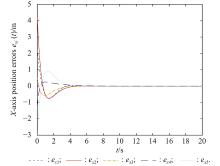
Fig 6
Position tracking errors of followers"
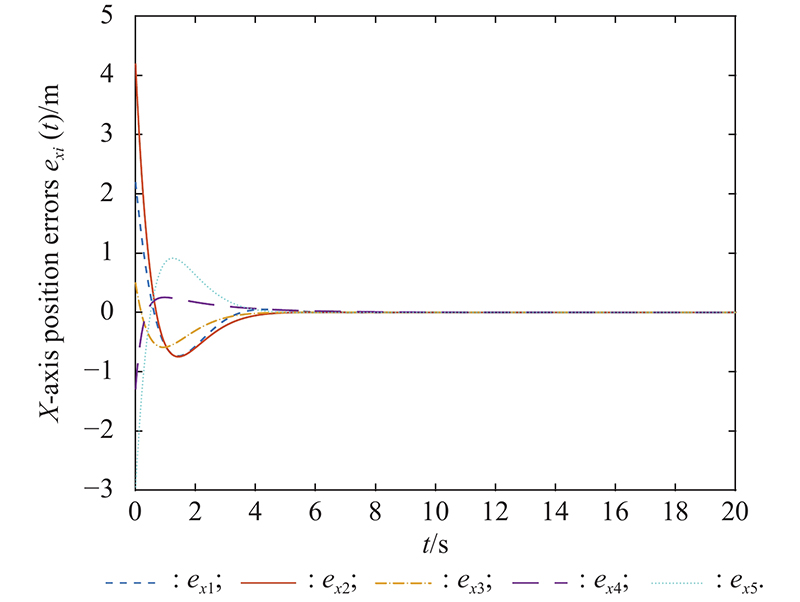
Fig 7
Velocity tracking errors of followers"
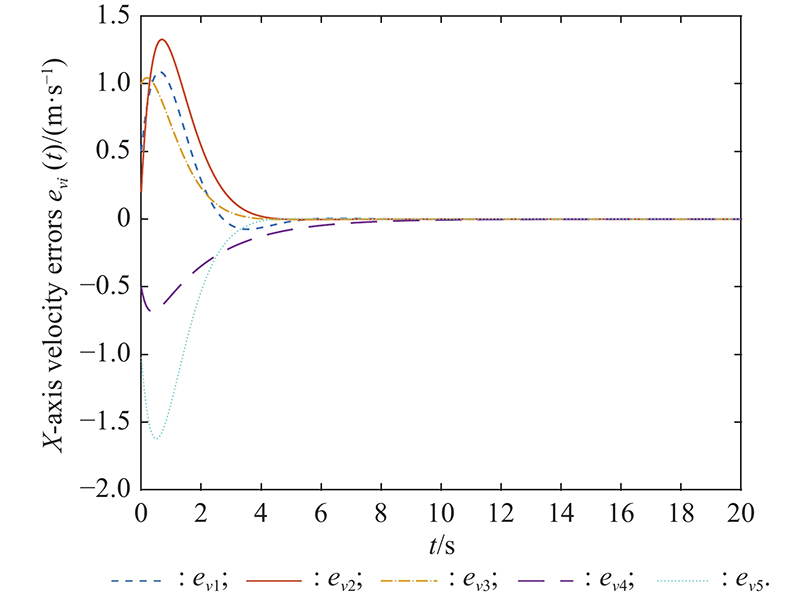
Fig 8
Control input of followers with method in this paper"
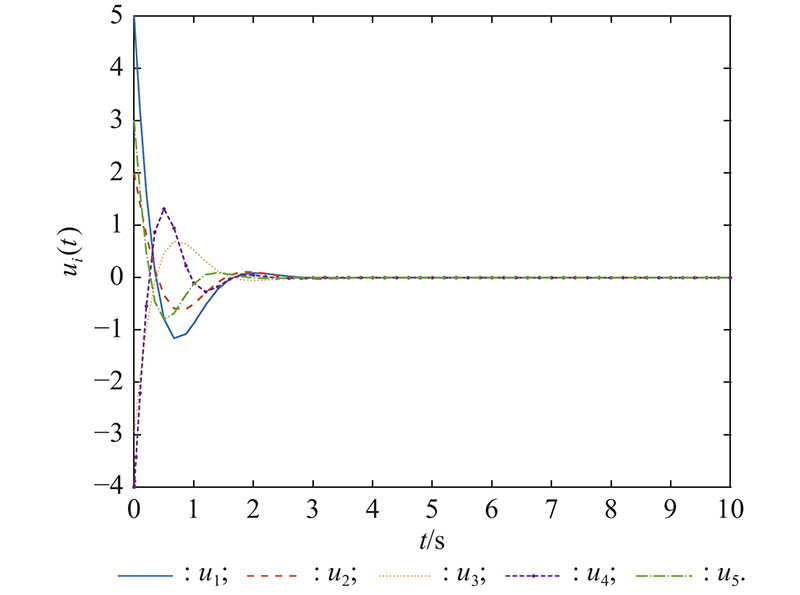
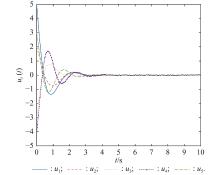
Fig 9
Control input of followers with method in [32] "
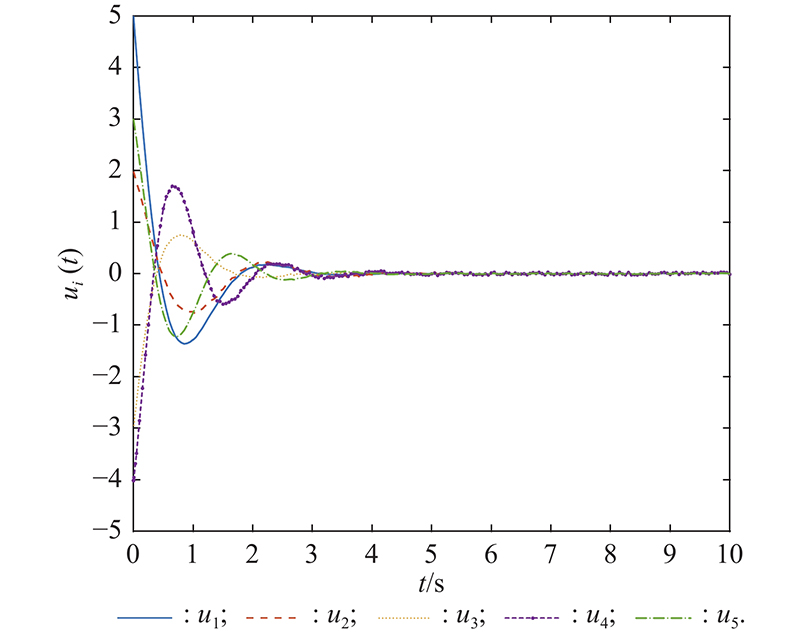
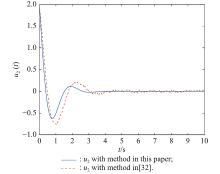
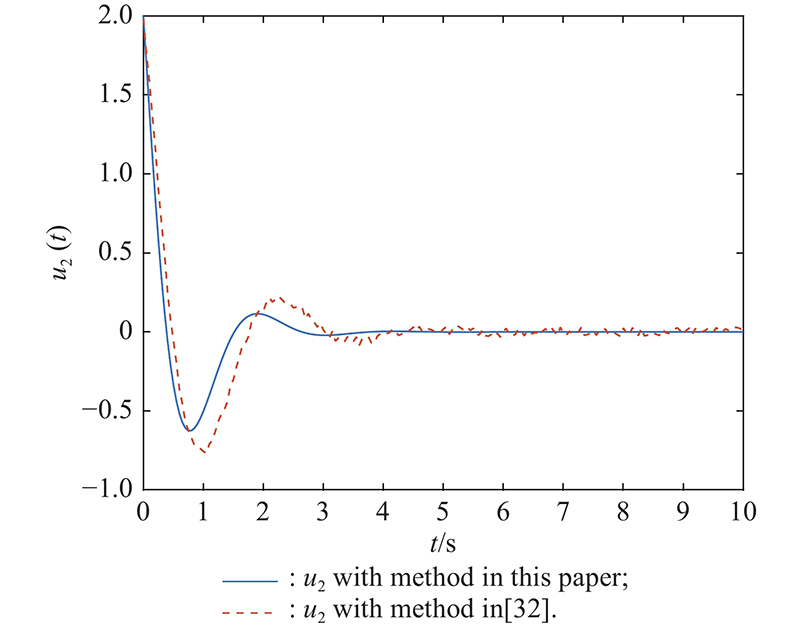
Fig 10
Control input of two control protocols"
| 1 |
LI L L, LUO H, STEVEN X, et al Performance-based fault detection and fault-tolerant control for automatic control systems. Automatica, 2019, 99, 308- 316.
doi: 10.1016/j.automatica.2018.10.047 |
| 2 |
YANG J Q, ZHU F L Fault detection of networked control systems in stochastic environments. Transactions of the Institute of Measurement and Control, 2013, 35 (4): 521- 530.
doi: 10.1177/0142331212459540 |
| 3 |
MEHMET A, TOLGAY K Robust adaptive fault tolerant control for a process with actuator faults. Journal of Process Control, 2020, 92, 169- 184.
doi: 10.1016/j.jprocont.2020.05.005 |
| 4 |
LIU Y S, DONG X W, REN Z, et al Fault-tolerant control for commercial aircraft with actuator faults and constraints. Journal of the Franklin Institute, 2019, 356 (7): 3849- 3868.
doi: 10.1016/j.jfranklin.2018.11.043 |
| 5 |
REIHANE R, FARZANEH A, KARO N Time-varying formation control of a collaborative heterogeneous multi agent system. Robotics and Autonomous Systems, 2014, 62 (12): 1799- 1805.
doi: 10.1016/j.robot.2014.07.005 |
| 6 |
CHOI J, OH S, HOROWITZ R Distributed learning and cooperative control for multi-agent systems. Automatica, 2009, 45 (12): 2802- 2814.
doi: 10.1016/j.automatica.2009.09.025 |
| 7 |
DIMAROGONAS D V, FRAZZOLI E, JOHANSSON K H Distributed event-triggered control for multi-agent systems. IEEE Trans. on Automatic Control, 2012, 57 (5): 1291- 1297.
doi: 10.1109/TAC.2011.2174666 |
| 8 |
GENG H, CHEN Z Q, LIU Z X, et al Consensus of a heterogeneous multi-agent system with input saturation. Neurocomputing, 2015, 166, 382- 388.
doi: 10.1016/j.neucom.2015.03.044 |
| 9 | LIU J C, MING P S Consensus gain analysis of stochastic multi-agent system. Journal of Northeastern University, 2016, 37 (9): 1217- 1220. |
| 10 |
GUO L, NIAN X H, PAN H Leader-following consensus of multi-agent system with diffusion. Asian Journal of Control, 2014, 16 (1): 188- 197.
doi: 10.1002/asjc.626 |
| 11 |
YU W W, ZHENG W X, CHEN G R, et al Second-order consensus in multi-agent dynamical systems with sampled position data. Automatica, 2011, 47 (7): 1496- 1503.
doi: 10.1016/j.automatica.2011.02.027 |
| 12 |
GONG P, WANG K Output feedback consensus control for fractional-order nonlinear multi-agent systems with directed topologies. Journal of the Franklin Institute, 2020, 357 (3): 1473- 1493.
doi: 10.1016/j.jfranklin.2019.10.032 |
| 13 |
TIAN X H, LIU H L, LIU H T Robust finite-time consensus control for multi-agent systems with disturbances and unknown velocities. ISA Transactions, 2018, 80, 73- 80.
doi: 10.1016/j.isatra.2018.07.032 |
| 14 |
ZHOU Y J, JIANG G P, XU F Y Distributed finite time consensus of second-order multi-agent systems via pinning control. IEEE Access, 2018, 6, 45617- 45624.
doi: 10.1109/ACCESS.2018.2865479 |
| 15 |
QIN L G, HE X, ZHOU D H, et al A new local-model-based distributed fault diagnosis scheme for multi-agent systems with actuator faults. IFAC-Papers Online, 2018, 51 (24): 292- 299.
doi: 10.1016/j.ifacol.2018.09.591 |
| 16 | SAHAR Y, MOHAMMAD H Robust adaptive fault-tolerant control for leader-follower flocking of uncertain multi-agent systems with actuator failure. ISA Transactions, 2017, 71 (2): 227- 234. |
| 17 |
CHEN C, LEWIS F L, XIE S L Resilient adaptive and H∞ controls of multi-agent systems under sensor and actuator faults. Automatica, 2019, 102, 19- 26.
doi: 10.1016/j.automatica.2018.12.024 |
| 18 |
ZHAO L, YANG G H End to end communication rate-based adaptive fault tolerant control of multi-agent systems under unreliable interconnections. Information Science, 2018, 460/461, 331- 345.
doi: 10.1016/j.ins.2018.05.051 |
| 19 |
ZHANG J, LYU M, SHEN T F, et al Sliding mode control for a class of nonlinear multi-agent system with time delay and uncertainties. IEEE Trans. on Industrial Electronics, 2018, 65 (1): 865- 875.
doi: 10.1109/TIE.2017.2701777 |
| 20 | ZHAO J, XIE X H, ZHANG R Decentralized sliding-mode and fault-tolerant control for heterogeneous multi-agent systems. Proc. of the 38th Chinese Control Conference, 2019, 95- 100. |
| 21 | QIN J H, ZHANG G S, ZHENG W X, et al Adaptive sliding mode consensus tracking for second-order nonlinear multi agent systems with actuator faults. IEEE Trans. on Cybernetics, 2019, 49 (5): 1605- 1615. |
| 22 |
ZHANG C X, WANG J H, ZHANG D X, et al Fault-tolerant adaptive finite-time attitude synchronization and tracking control for multi-spacecraft formation. Aerospace Science and Technology, 2018, 73, 197- 209.
doi: 10.1016/j.ast.2017.12.004 |
| 23 |
NAIR R R, KARKI H, SHUKLA A, et al Fault-tolerant formation control of nonholonomic robots using fast adaptive gain nonsingular terminal sliding mode control. IEEE Systems Journal, 2019, 13 (1): 1006- 1017.
doi: 10.1109/JSYST.2018.2794418 |
| 24 |
QIN J H, MA Q C, GAO H J, et al Fault-tolerant cooperative tracking control via integral sliding mode control technique. IEEE/ASME Trans. on Mechatronics, 2018, 23 (1): 342- 351.
doi: 10.1109/TMECH.2017.2775447 |
| 25 | LIU Z X, LIU H, LI Y B, et al Observer-based consensus of linear multi-agent systems with time-varying delays. Control and Decision, 2019, 34 (9): 1885- 1892. |
| 26 | CHEN S M, XIE Y J, WANG M Y Fast disturbance rejection consensus for second-order multi-agent based on sliding mode. Information and Control, 2019, 48 (5): 619- 626. |
| 27 | ZHOU Y, HUANG J S, GAO T T Finite-time consensus control of nonlinear mechanical systems with input saturation. Proc. of the 34th Chinese Control Conference, 2015, 1240- 1245. |
| 28 |
MENON P, EDWARDS C Robust fault estimation using relative information in linear multi-agent networks. IEEE Trans. on Automatic Control, 2014, 59 (2): 477- 482.
doi: 10.1109/TAC.2013.2274689 |
| 29 |
ZHAO X Y, ZONG Q, TIAN B L, et al Integrated fault estimation and fault-tolerant tracking control for Lipschitz nonlinear multiagent systems. IEEE Trans. on Cybernetics, 2020, 50 (2): 678- 688.
doi: 10.1109/TCYB.2018.2871243 |
| 30 | JIA W H, WANG J Z Partial-nodes-based distributed fault detection and isolation for second-order multi-agent systems with exogenous disturbances. IEEE Trans. on Cybernetics, 2020, 52 (4): 2518- 2530. |
| 31 |
LI X L, LUO X Y, LI S B, et al Consensus of second order nonlinear multi-agent systems via sliding mode observer and controller. Journal of Systems Engineering and Electronics, 2017, 28 (4): 756- 765.
doi: 10.21629/JSEE.2017.04.15 |
| 32 |
XU M Y, YANG P, HUANG Y, et al Fault-tolerant consensus control of second-order multi-agent system based on sliding mode control theory. Journal of Engineering, 2019, 2019 (15): 555- 560.
doi: 10.1049/joe.2018.9380 |
| 33 |
WANG X H, JI H B Leader-follower consensus for a class of nonlinear multi-agent systems. International Journal of Control Automation and Systems, 2012, 10 (1): 27- 35.
doi: 10.1007/s12555-012-0104-3 |
| 34 |
BHAT S P, BERNSTEIN D S Finite-time stability of continuous autonomous systems. SIMA Journal of Control and Optimization, 2000, 38 (3): 751- 766.
doi: 10.1137/S0363012997321358 |
| 35 | ZHANG K, LIU G S, JIANG B Robust unknown input observer-based fault estimation of leader-follower linear multi-agent systems. Circuits System Signal Process, 2017, 36 (1): 525- 542. |
| 36 |
DAVILA J, FRIDMAN L, LEVANT A Second-order sliding-mode observer for mechanical systems. IEEE Trans. on Automatic Control, 2005, 50 (11): 1785- 1789.
doi: 10.1109/TAC.2005.858636 |
| 37 | GANTMACHER F R. The theory of matrices. New York: Chelsea, 1959. |
| [1] | Narin JEERANANTASIN, Suksun NUNGAM. Sliding mode control of three-phase AC/DC converters using exponential rate reaching law [J]. Journal of Systems Engineering and Electronics, 2022, 33(1): 210-221. |
| [2] | Sader MALIKA, Fuyong WANG, Zhongxin LIU, Zengqiang CHEN. Distributed fuzzy fault-tolerant consensus of leader-follower multi-agent systems with mismatched uncertainties [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1031-1040. |
| [3] | Duo QI, Junhua HU, Xiaolong LIANG, Jiaqiang ZHANG, Zhihao ZHANG. Research on consensus of multi-agent systems with and without input saturation constraints [J]. Journal of Systems Engineering and Electronics, 2021, 32(4): 947-955. |
| [4] | Zongxing LI, Rui ZHANG. Time-varying sliding mode control of missile based on suboptimal method [J]. Journal of Systems Engineering and Electronics, 2021, 32(3): 700-710. |
| [5] |
Bingqiang LI, Tianyi LAN, Yiyun ZHAO, Shuaishuai LYU.
Open-loop and closed-loop |
| [6] | Xia WU, Yan LI, Yongjian SUN, Alei CHEN, Jianwen CHEN, Jianchao MA, Hao CHEN. Investigation of MAS structure and intelligent+ information processing mechanism of hypersonic target detection and recognition system [J]. Journal of Systems Engineering and Electronics, 2020, 31(6): 1105-1115. |
| [7] | Jie ZHANG, Gang WANG, Shaohua YUE, Yafei SONG, Jiayi LIU, Xiaoqiang YAO. Multi-agent system application in accordance with game theory in bi-directional coordination network model [J]. Journal of Systems Engineering and Electronics, 2020, 31(2): 279-289. |
| [8] | Weiwei WU, Qian MA, Yexin LIU, Yongjun KIM. A model for knowledge transfer in a multi-agent organization based on lattice kinetic model [J]. Journal of Systems Engineering and Electronics, 2020, 31(1): 156-167. |
| [9] | Vedadi Moghaddam TAHMINEH, Yadavar Nikravesh SEYYED KAMALEDDIN, Azam Khosravi MOHAMMAD. Constrained sliding mode control of nonlinear fractional order input affine systems [J]. Journal of Systems Engineering and Electronics, 2019, 30(5): 995-1006. |
| [10] | Dariush TAVAKOLIFAR, Hamid KHALOOZADEH, Roya AMJADIFARD. Stabilization of switched systems with all unstable modes: application to the aircraft team problem [J]. Journal of Systems Engineering and Electronics, 2019, 30(4): 792-798. |
| [11] | Haibo LIU, Heping WANG, Junlei SUN. Attitude control for QTR using exponential nonsingular terminal sliding mode control [J]. Journal of Systems Engineering and Electronics, 2019, 30(1): 191-200. |
| [12] | Yueneng YANG, Ye YAN. Backstepping sliding mode control for uncertain strictfeedback nonlinear systems using neural-network-based adaptive gain scheduling [J]. Journal of Systems Engineering and Electronics, 2018, 29(3): 580-586. |
| [13] | Yuhang YUN, Shengjing TANG, Jie GUO, Wei SHANG. Robust controller design for compound control missile with fixed bounded convergence time [J]. Journal of Systems Engineering and Electronics, 2018, 29(1): 116-133. |
| [14] | Xiaolei Li, Xiaoyuan Luo, Shaobao Li, Jianjin Li, and Xinping Guan. Consensus of second-order nonlinear multi-agent systems via sliding mode observer and controller [J]. Systems Engineering and Electronics, 2017, 28(4): 756-. |
| [15] | Ri Liu, Xiuxia Sun, Wenhan Dong, and Dong Wang. Finite-time adaptive sliding mode control for heavyweight airdrop operations [J]. Systems Engineering and Electronics, 2017, 28(2): 338-346. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||