
Journal of Systems Engineering and Electronics ›› 2022, Vol. 33 ›› Issue (5): 1237-1248.doi: 10.23919/JSEE.2022.000118
• CONTROL THEORY AND APPLICATION • Previous Articles Next Articles
Yangjun GAO1,2( ), Guangyun LI1,*(), Zhiwei LYU1(), Lundong ZHANG1(), Zhongpan LI3()
), Guangyun LI1,*(), Zhiwei LYU1(), Lundong ZHANG1(), Zhongpan LI3()
Received:2021-05-04
Online:2022-10-27
Published:2022-10-27
Contact:
Guangyun LI
E-mail:951242669@qq.com;guangyun_li_chxy@163.com;lvzhiwei@sina.com;zhangldxd@163.com;724136242@qq.com
About author:Supported by:Yangjun GAO, Guangyun LI, Zhiwei LYU, Lundong ZHANG, Zhongpan LI. Improved adaptively robust estimation algorithm for GNSS spoofer considering continuous observation error[J]. Journal of Systems Engineering and Electronics, 2022, 33(5): 1237-1248.
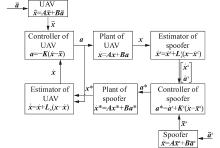
Fig 1
UAV-spoofer closed-loop system"
Table 1
Parameters of UAV"
| Parameter | | | | | |
| Unit value | 2 | 0.3 | 0 | | |
Table 2
Parameter setting of spoofer estimator"
| Parameter | | | | |
| Unit value | 2 | 0.3 | 0 | |
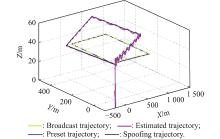
Fig 2
Schematic diagram of spoofer’s estimated trajectory and broadcast trajectory in Experiment 1"
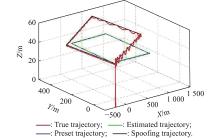
Fig 3
Schematic diagram of UAV’s estimated trajectory and true trajectory in Experiment 1"
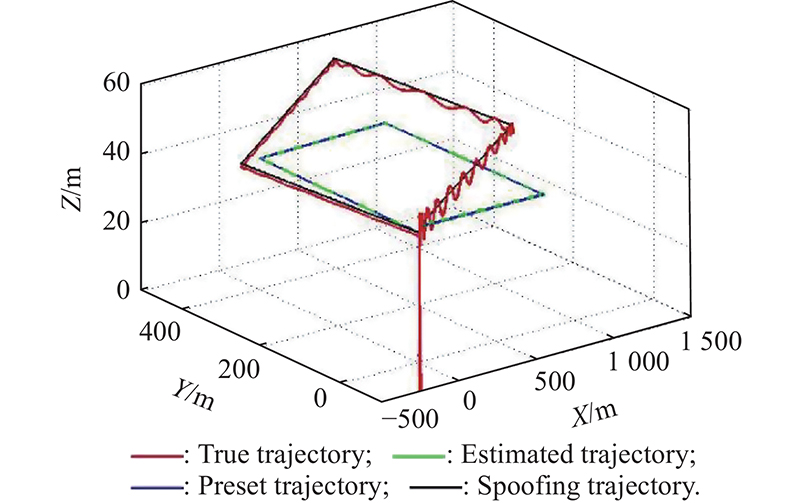
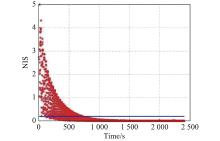
Fig 4
NIS values of UAV system in Experiment 1"
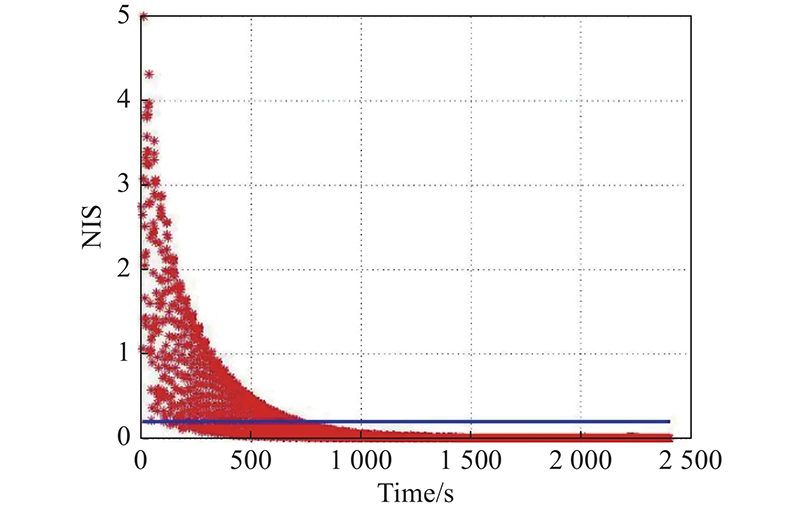
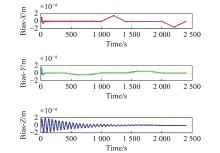
Fig 5
Estimated deviation of acceleration measurement in Experiment 1"
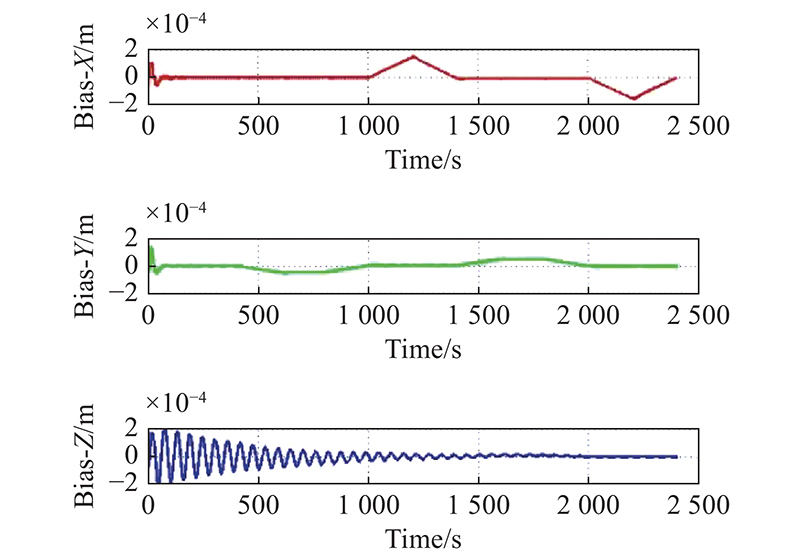
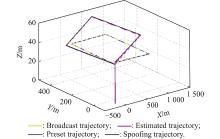
Fig 6
Schematic diagram of spoofer’s estimated trajectory and broadcast trajectory in Experiment 2"
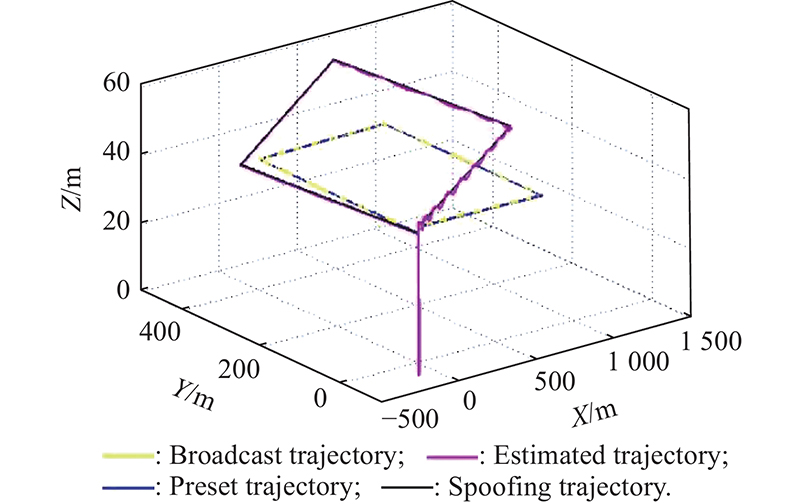
Fig 7
Schematic diagram of UAV’s estimated trajectory and true trajectory in Experiment 2"
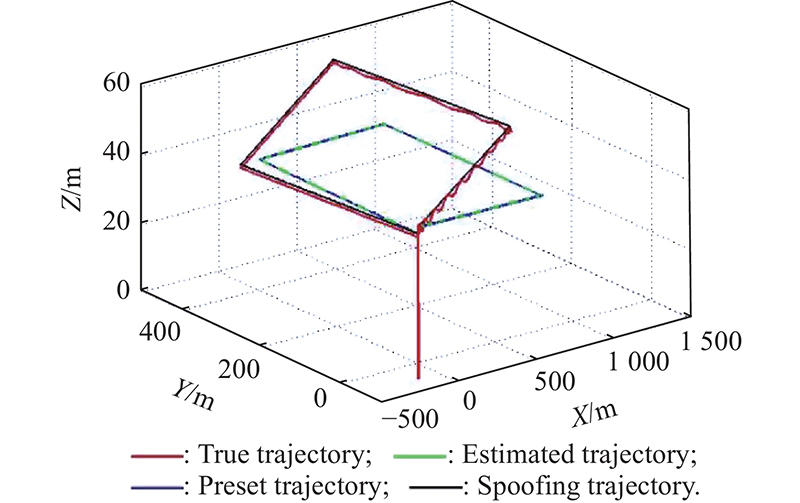
Fig 8
NIS values of UAV system in Experiment 2"
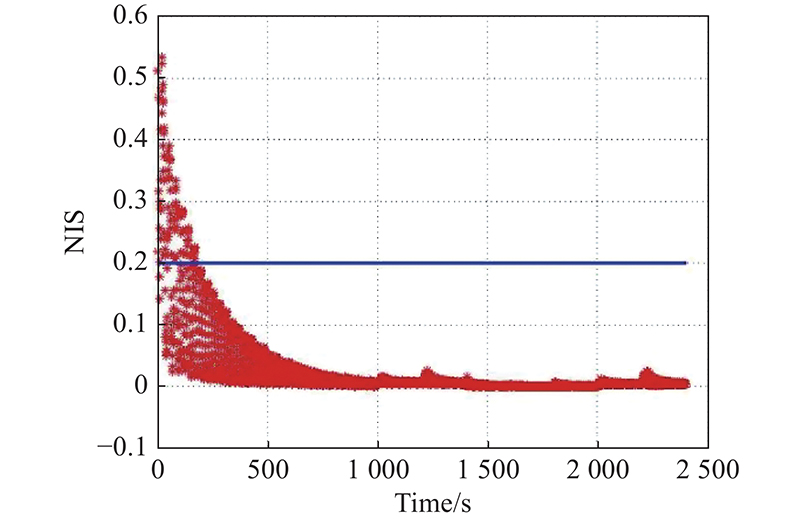
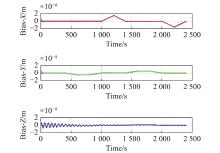
Fig 9
Estimated deviation of acceleration measurement in Experiment 2"
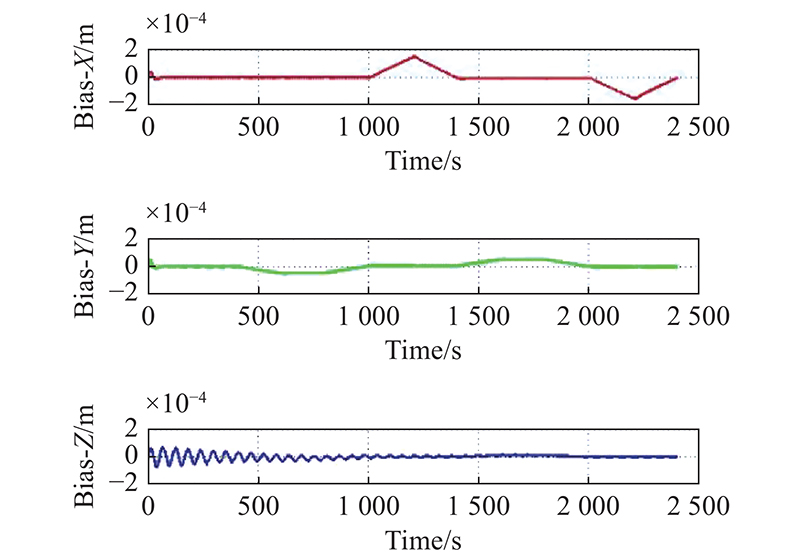
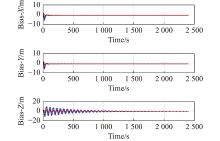
Fig 10
Comparison of UAV’s true trajectory error"
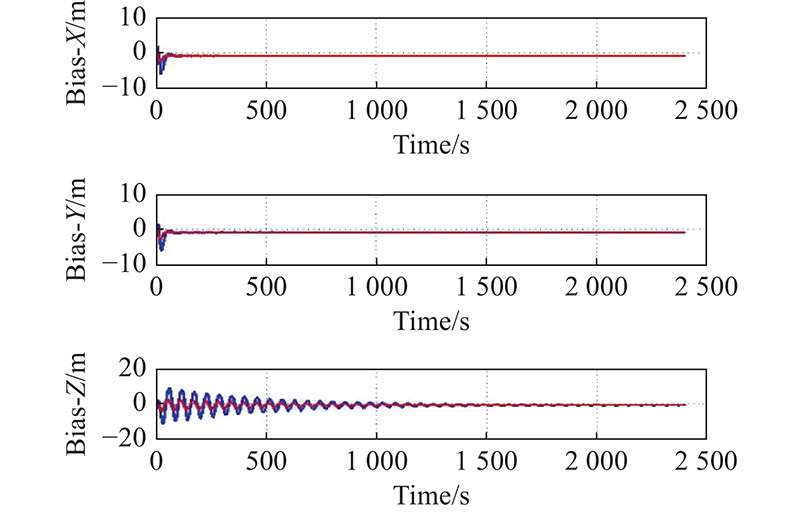
Fig 11
Comparison of UAV’s estimated trajectory error"
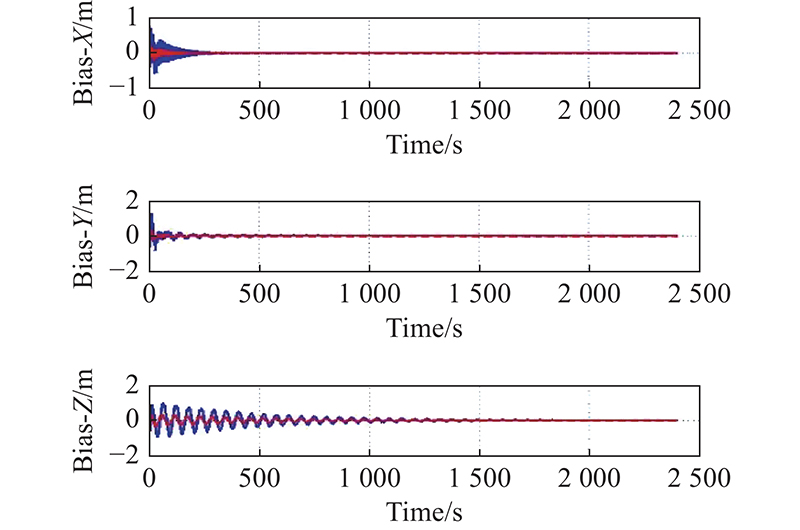
Fig 12
Comparison of spoofer’s estimated trajectory error"
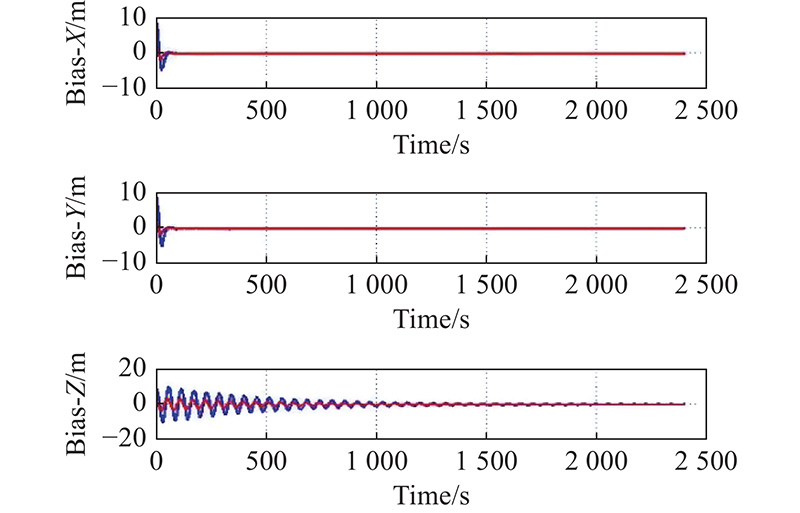
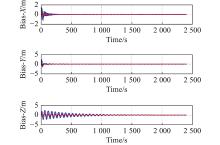
Fig 13
Comparison of spoofer’s broadcast trajectory error"
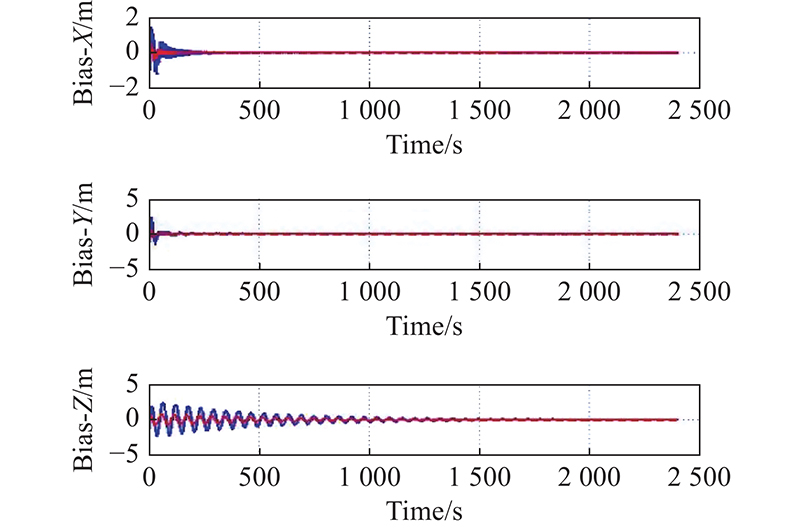
Table 3
Statistical table of convergence time of various errors"
| Types of convergence time | Type of experiment | X axis convergence time/s | Y axis convergence time/s | Z axis convergence time/s | Threshold of convergence/m |
| 1 | 1 | 234 | 388 | 2377 | 1 |
| 2 | 115 | 151 | 2022 | ||
| 2 | 1 | 172 | 257 | 1178 | 0.1 |
| 2 | 58 | 27 | 631 | ||
| 3 | 1 | 45 | 41 | 1345 | 1 |
| 2 | 32 | 29 | 770 | ||
| 4 | 1 | 209 | 284 | 1609 | 0.1 |
| 2 | 84 | 84 | 1061 |
Table 4
Statistical table of convergence shortening time and the percentage of shortening time of various errors"
| Types of convergence time | X | Y | Z | Average reduction in percentage/s | |||||
| Shortenen time/s | Percentage of shorten time/% | Shortenen time/s | Percentage of shorten time/% | Shortenen time/s | Percentage of shorten time/% | ||||
| 1 | 119 | 50.9 | 237 | 61.1 | 355 | 14.9 | 42.3 | ||
| 2 | 114 | 66.3 | 230 | 89.5 | 547 | 46.4 | 67.4 | ||
| 3 | 13 | 28.9 | 12 | 29.3 | 575 | 42.8 | 33.7 | ||
| 4 | 125 | 59.8 | 200 | 70.4 | 548 | 34.1 | 54.8 | ||
| 1 |
HUANG K W, WANG H M Combating the control signal spoofing attack in UAV systems. IEEE Trans. on Vehicular Technology, 2018, 67 (8): 7769- 7773.
doi: 10.1109/TVT.2018.2830345 |
| 2 |
XIAO L, LU X Z, XU D J, et al UAV relay in VANETs against smart jamming with reinforcement learning. IEEE Trans. on Vehicular Technology, 2018, 67 (5): 4087- 4097.
doi: 10.1109/TVT.2018.2789466 |
| 3 |
LUO C B, MCCLEAN S, PARR G, et al UAV position estimation and collision avoidance using the extended Kalman filter. IEEE Trans. on Vehicular Technology, 2013, 62 (6): 2749- 2762.
doi: 10.1109/TVT.2013.2243480 |
| 4 | HUMPHREYS T E, LEDVINA B M, PSIAKI M L, et al Assessing the spoofing threat. GPS World, 2009, 20 (1): 28. |
| 5 | HARTMANN K, STEUP C The vulnerability of UAVs to cyber attacks: an approach to the risk assessment. Proc. of the 5th International Conference on Cyber Conflict, 2013, 1- 23. |
| 6 | WARNER J S, JOHNSTON R G A simple demonstration that the global positioning system (GPS) is vulnerable to spoofing. Journal of Security Administration, 2002, 25 (2): 19- 27. |
| 7 | SHEPARD D P, BHATTI J A, HUMPHREYS T E, et al Evaluation of smart grid and civilian UAV vulnerability to GPS spoofing attacks. Proc. of the GNSS Conference, 2012, 3591- 3605. |
| 8 |
KERNS A J, SHEPARD D P, BHATTI J A, et al Unmanned aircraft capture and control via GPS spoofing. Journal of Field Robotics, 2014, 31 (4): 617- 636.
doi: 10.1002/rob.21513 |
| 9 | GUO Y, WU M P, TANG K H, et al. Position deceptive tracking controller and parameters analysis via error characteristics for unmanned aerial vehicle. International Journal of Advanced Robotic Systems, 2019. DOI: 10.1177/1729881418825407. |
| 10 | LI M H, KOU Y H, XU Y, et al Design and field test of a GPS spoofer for UAV trajectory manipulation. Proc. of the 9th China Satellite Navigation Academic Conference-S03 Satellite Navigation Signals and Anti-Interference Technology, 2018, 161- 173. |
| 11 | SAHAWNEH L, JARRAH M A Development and calibration of low cost MEMS IMU for UAV applications. Proc. of the International Symposium on Mechatronics & its Applications, 2008, 1- 9. |
| 12 |
YANG D C, WU Q Q, ZENG Y, et al Energy trade-off in ground-to-UAV communication via trajectory design. IEEE Trans. on Vehicular Technology, 2018, 67 (7): 6721- 6726.
doi: 10.1109/TVT.2018.2816244 |
| 13 |
GUO Y, WU M P, TANG K H, et al Covert spoofing algorithm of UAV based on GPS/INS-integrated navigation. IEEE Trans. on Vehicular Technology, 2019, 68 (7): 6557- 6564.
doi: 10.1109/TVT.2019.2914477 |
| 14 | LIU J Z, WANG L New solution bounds of the continuous algebraic Riccati equation and their applications in redundant control input systems. Science China Information Sciences, 2019, 62 (10): 69- 85. |
| 15 |
MAITY S, SAHU P K Modeling and analysis of a fast and robust module-integrated analog photovoltaic MPP tracker. IEEE Trans. on Power Electronics, 2016, 31 (1): 280- 291.
doi: 10.1109/TPEL.2015.2402281 |
| 16 | MIDDLETON R H, MILLER D E. On the achievable delay margin using LTI control for unstable plants. IEEE Trans. on Automatic Control, 2007, 52(7): 1194−1207. |
| 17 | YANG Y X, REN X, XU Y Major advances in the theory and application of adaptive robust filtering. Journal of Navigation and Positioning, 2013, 1 (1): 9- 15. |
| 18 |
TUGNAIT J K Pilot spoofing attack detection and countermeasure. IEEE Trans. on Communications, 2018, 66 (5): 2093- 2106.
doi: 10.1109/TCOMM.2018.2797989 |
| 19 | LI C, WANG X D Jamming research of the UAV GPS/INS integrated navigation system based on trajectory cheating. Proc. of the 9th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics, 2016, 1113- 1117. |
| 20 |
LEE H, EOM S, PARK J, et al UAV-aided secure communications with cooperative jamming. IEEE Trans. on Vehicular Technology, 2018, 67 (10): 9385- 9392.
doi: 10.1109/TVT.2018.2853723 |
| 21 | MOHAMMAD M, ALIREZA E, HAMID K Prediction-discrepancy based on innovative particle filter for estimating UAV true position in the presence of the GPS spoofing Attacks. IET Radar, Sonar & Navigation, 2020, 14 (6): 887- 897. |
| [1] | Honghong ZHANG, Xusheng GAN, Shuangfeng LI, Zhiyuan CHEN. UAV safe route planning based on PSO-BAS algorithm [J]. Journal of Systems Engineering and Electronics, 2022, 33(5): 1151-1160. |
| [2] | Yuan ZENG, Wenbin LU, Bo YU, Shifei TAO, Haosu ZHOU, Yu CHEN. Improved IMM algorithm based on support vector regression for UAV tracking [J]. Journal of Systems Engineering and Electronics, 2022, 33(4): 867-876. |
| [3] | Dongju CAO, Wendong YANG, Hui CHEN, Yang WU, Xuanxuan TANG. Energy efficiency maximization for buffer-aided multi-UAV relaying communications [J]. Journal of Systems Engineering and Electronics, 2022, 33(2): 312-321. |
| [4] | Yangyang JIANG, Yan GAO, Wenqi SONG, Yue LI, Quan QUAN. Bibliometric analysis of UAV swarms [J]. Journal of Systems Engineering and Electronics, 2022, 33(2): 406-425. |
| [5] | Jinqiang HU, Husheng WU, Renjun ZHAN, Rafik MENASSEL, Xuanwu ZHOU. Self-organized search-attack mission planning for UAV swarm based on wolf pack hunting behavior [J]. Journal of Systems Engineering and Electronics, 2021, 32(6): 1463-1476. |
| [6] | Ziquan YU, Youmin ZHANG, Bin JIANG. PID-type fault-tolerant prescribed performance control of fixed-wing UAV [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1053-1061. |
| [7] | Juan Antonio VAZQUEZ TREJO, Adrien GUENARD, Manuel ADAM-MEDINA, Jean-Christophe PONSART, Laurent CIARLETTA, Damiano ROTONDO, Didier THEILLIOL. Event-triggered leader-following formation control for multi-agent systems under communication faults: application to a fleet of unmanned aerial vehicles [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1014-1022. |
| [8] | Tao YE, Zongyang ZHAO, Jun ZHANG, Xinghua CHAI, Fuqiang ZHOU. Low-altitude small-sized object detection using lightweight feature-enhanced convolutional neural network [J]. Journal of Systems Engineering and Electronics, 2021, 32(4): 841-853. |
| [9] | Gaofeng WU, Kaifang WAN, Xiaoguang GAO, Xiaowei FU. Placement of unmanned aerial vehicles as communication relays in two-tiered multi-agent system: clustering based methods [J]. Journal of Systems Engineering and Electronics, 2020, 31(2): 231-242. |
| [10] | Zhen XU, Enze ZHANG, Qingwei CHEN. Rotary unmanned aerial vehicles path planning in rough terrain based on multi-objective particle swarm optimization [J]. Journal of Systems Engineering and Electronics, 2020, 31(1): 130-141. |
| [11] | Min ZHANG, Chenming ZHENG, Kun HUANG. Fixed-wing UAV guidance law for ground target over-flight tracking [J]. Journal of Systems Engineering and Electronics, 2019, 30(2): 384-392. |
| [12] | Zhiqiang JIAO, Peiyang YAO, Jieyong ZHANG, Yun ZHONG, Xun WANG. MAV/UAV task coalition phased-formation method [J]. Journal of Systems Engineering and Electronics, 2019, 30(2): 402-414. |
| [13] | Liang ZHANG, Yi LU, Shida XU, Han FENG. Multiple UAVs cooperative formation forming control based on back-stepping-like approach [J]. Journal of Systems Engineering and Electronics, 2018, 29(4): 816-822. |
| [14] | Qian WANG, Chuanding ZHANG, Deyong XIAN. Multi-channel signal parameters joint optimization for GNSS terminals [J]. Journal of Systems Engineering and Electronics, 2018, 29(1): 39-47. |
| [15] | Rongling Lang, Xinyue Li, Fei Gao, and Liang Yang. Re-scaling and adaptive stochastic resonance as a tool for weak GNSS signal acquisition [J]. Journal of Systems Engineering and Electronics, 2016, 27(2): 290-296. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||