
Journal of Systems Engineering and Electronics ›› 2022, Vol. 33 ›› Issue (3): 706-715.doi: 10.23919/JSEE.2022.000065
• CONTROL THEORY AND APPLICATION • Previous Articles Next Articles
Shang SHI1,2( ), Guosheng ZHANG1(), Huifang MIN3,*(), Yinlong HU1(), Yonghui SUN1()
), Guosheng ZHANG1(), Huifang MIN3,*(), Yinlong HU1(), Yonghui SUN1()
Received:2020-12-12
Online:2022-06-18
Published:2022-06-24
Contact:
Huifang MIN
E-mail:shishangshang@foxmail.com;zgs15295770291@163.com;jiejie1043640772@126.com;yinlonghu@outlook.com;sunyonghui168@163.com
About author:Supported by:Shang SHI, Guosheng ZHANG, Huifang MIN, Yinlong HU, Yonghui SUN. Exact uncertainty compensation of linear systems by continuous fixed-time output-feedback controller[J]. Journal of Systems Engineering and Electronics, 2022, 33(3): 706-715.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
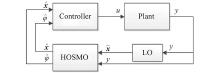
Fig 1
Controller design block diagram"
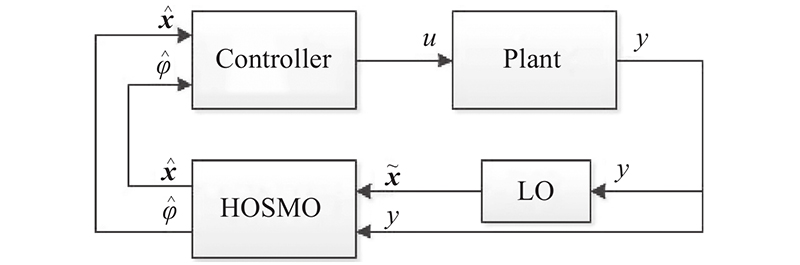
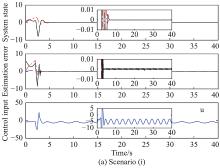
Fig 2
"
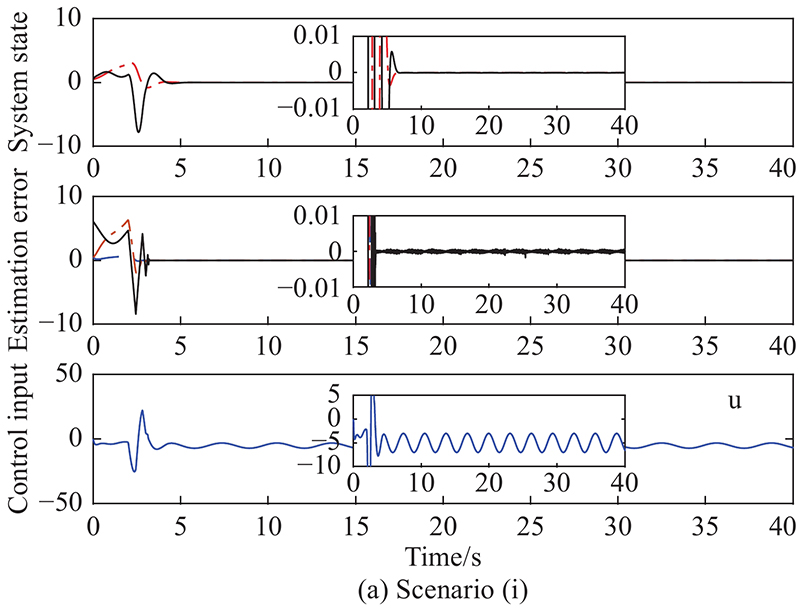
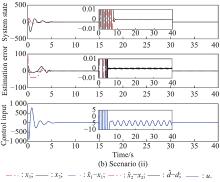
Fig 2
Curves under proposed fixed-time output-feedback controller (40)"
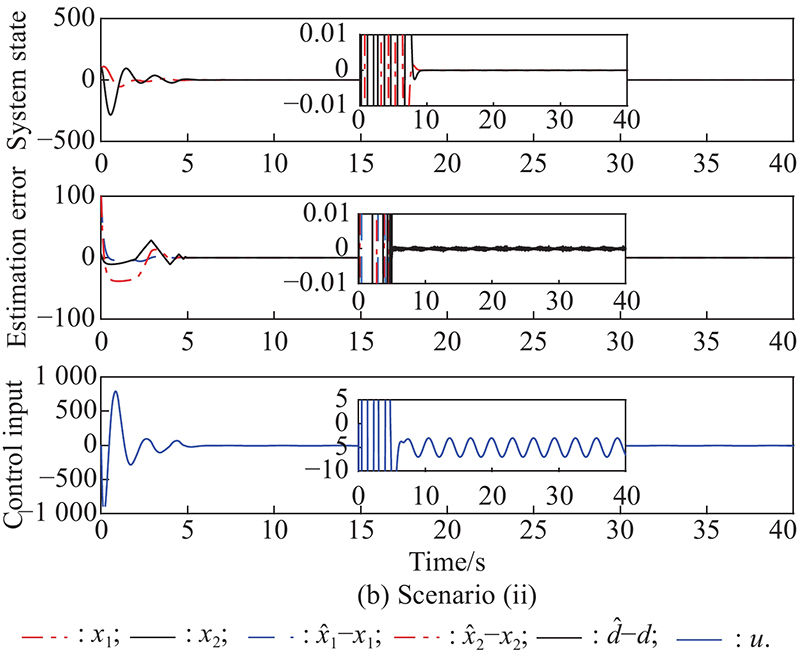
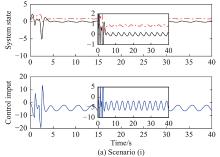
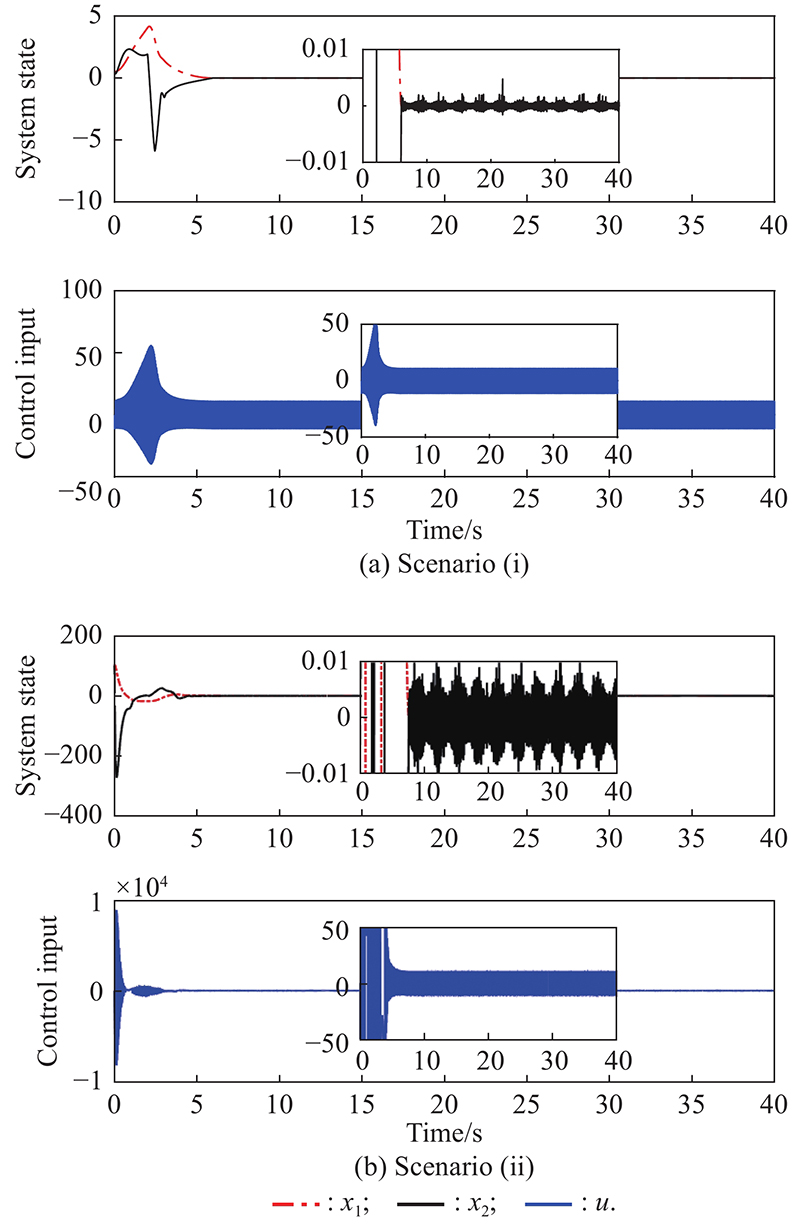
Fig 3
"
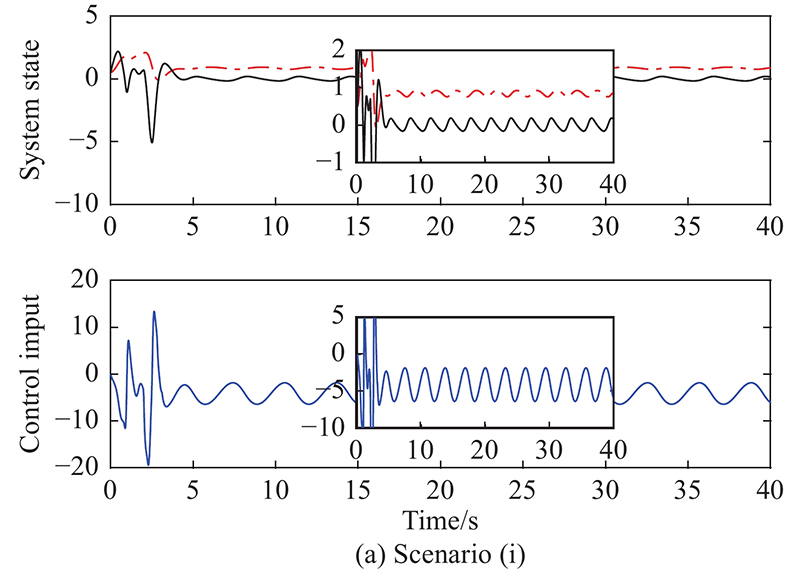
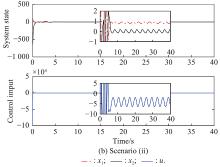
Fig 3
Curves under the fixed-time attractive controller (41) proposed in [19] "
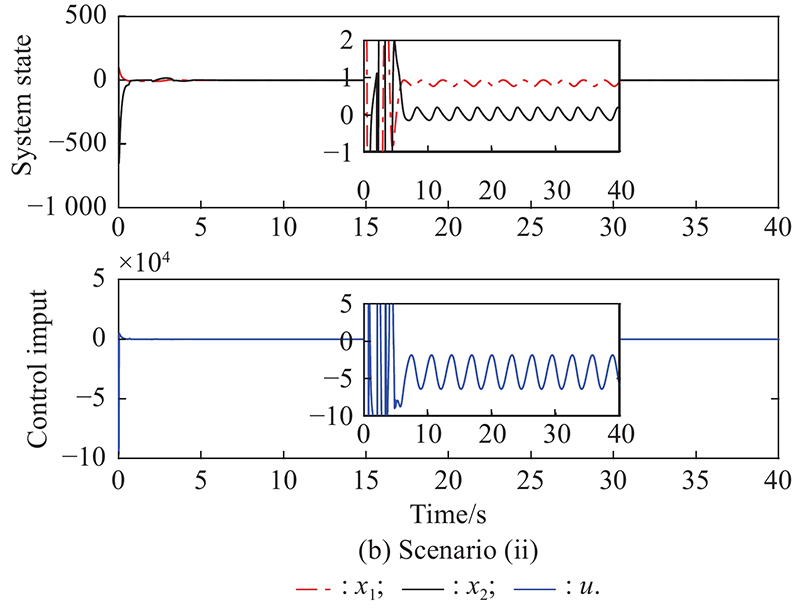

Fig 4
Curves under the discontinuous fixed-time controller (42) proposed in [19] "
| 1 | GONG X, FU Y B, JIANG L X, et al Application of super-twisting extended state observer in fault reconfiguration of quadrotor aircraft. Systems Engineering and Electronics, 2020, 42 (9): 2077- 2084. |
| 2 |
ZHAO Y, DONG L L Adaptive back-stepping control on container ships for path following. Journal of Systems Engineering and Electronics, 2020, 31 (4): 780- 791.
doi: 10.23919/JSEE.2020.000053 |
| 3 |
MIN H F, XU S Y, ZHANG Z Q Adaptive finite-time stabilization of stochastic nonlinear systems subject to full-state constraints and input saturation. IEEE Trans. on Automatic Control, 2021, 66 (3): 1306- 1313.
doi: 10.1109/TAC.2020.2990173 |
| 4 |
MIN H F, XU S Y, ZHANG B Y, et al Globally adaptive control for stochastic nonlinear time-delay systems with perturbations and its application. Automatica, 2019, 102, 105- 110.
doi: 10.1016/j.automatica.2019.01.004 |
| 5 | UTKIN V, Sliding modes in control and optimization. Berlin: Springer-Verlag, 1992. |
| 6 |
LEVANT A Higher-order sliding modes, differentiation and output-feedback control. International Journal of Control, 2003, 76 (9/10): 924- 941.
doi: 10.1080/0020717031000099029 |
| 7 |
DING S H, LEVANT A, LI S H Simple homogeneous sliding-mode controller. Automatica, 2016, 67, 22- 32.
doi: 10.1016/j.automatica.2016.01.017 |
| 8 |
SHI S, XU S Y, GU J, et al Global high-order sliding mode controller design subject to mismatched terms: application to buck converter. IEEE Trans. on Circuits Systems-I: Regular Papers, 2019, 66 (12): 4840- 4849.
doi: 10.1109/TCSI.2019.2933164 |
| 9 |
MIN H F, XU S Y, MA Q, et al Composite-observer-based output-feedback control for nonlinear time-delay systems with input saturation and its application. IEEE Trans. on Industrial Electronics, 2018, 65 (7): 5856- 5863.
doi: 10.1109/TIE.2017.2784347 |
| 10 | MIN H F, XU S Y, ZHANG B Y, et al Output-feedback control for stochastic nonlinear systems subject to input saturation and time-varying delay. IEEE Trans. on Automatic Control, 2018, 64 (1): 359- 364. |
| 11 |
BEJARANO F, FRIDMAN L, POZNYAK A Exact state estimation for linear systems with unknown inputs based on hierarchical super-twisting algorithm. International Journal of Robust Nonlinear Control, 2007, 17 (18): 1734- 1753.
doi: 10.1002/rnc.1190 |
| 12 |
LOZA A, BEJARANO F, FRIDMAN L Unmatched uncertainties compensation based on high-order sliding mode observation. International Journal of Robust Nonlinear Control, 2013, 23 (7): 754- 764.
doi: 10.1002/rnc.2795 |
| 13 | FERREIRA A, BEJARANO F, FRIDMAN L Robust control with exact uncertainties compensation: with or without chattering? IEEE Trans. on Control Systems Technology, 2011, 19 (5): 965- 975. |
| 14 | BASIN M, PANATHULA C, SHTESSEL Y, et al Continuous finite-time higher order output regulators for systems with unmatched unbounded disturbances. IEEE Trans. on Industrial Electronics, 2016, 63 (8): 5036- 5043. |
| 15 |
SHI S, XU S Y, YU X, et al Robust output-feedback finite-time regulator of systems with mismatched uncertainties bounded by positive functions. IET Control Theory and Application, 2017, 11 (17): 3107- 3114.
doi: 10.1049/iet-cta.2017.0291 |
| 16 | MIN H F, XU S Y, ZHANG B Y, et al Practically finite-time control for nonlinear systems with mismatching conditions and application to a robot system. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2020, 50 (2): 2168- 2216. |
| 17 |
YANG R M, PEI W H, HAN Y Z, et al Finite-time adaptive robust simultaneous stabilization of nonlinear delay systems by the Hamiltonian function method. Science China: Information Science, 2021, 64 (6): 169201.
doi: 10.1007/s11432-019-2804-2 |
| 18 |
ANDRIEU V, PRALY L, ASTOLFI A Homogeneous approximation, recursive observer and output feedback. SIAM Journal on Control and Optimization, 2008, 47 (4): 1814- 1850.
doi: 10.1137/060675861 |
| 19 |
POLYAKOV A Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans. on Automatic Control, 2012, 57 (8): 2106- 2110.
doi: 10.1109/TAC.2011.2179869 |
| 20 |
NING B D, HAN Q L Prescribed finite-time consensus tracking for multi-agent systems with nonholonomic chained-form dynamics. IEEE Trans. on Automatic Control, 2019, 64 (4): 1686- 1693.
doi: 10.1109/TAC.2018.2852605 |
| 21 |
ZUO Z Y, HAN Q L, NING B D, et al An overview of recent advances in fixed-time cooperative control of multiagent systems. IEEE Trans. on Industrial Electronics, 2018, 14 (6): 2322- 2334.
doi: 10.1109/TII.2018.2817248 |
| 22 | SHI S, GU J, XU S Y, et al Globally fixed-time high-order sliding mode control for new sliding mode systems subject to mismatched terms and its application. IEEE Trans. on Industrial Electronics, 2019, 67 (12): 10776- 10786. |
| 23 |
SHI S, MIN H F, DING S H Observer-based adaptive scheme for fixed-time frequency estimation of biased sinusoidal signals. Automatica, 2021, 127, 109559.
doi: 10.1016/j.automatica.2021.109559 |
| 24 |
BASIN M, SHTESSEL Y, ALDUKALI F Continuous finite-and fixed-time high-order regulators. Journal of the Franklin Institute, 2016, 353 (18): 5001- 5012.
doi: 10.1016/j.jfranklin.2016.09.026 |
| 25 |
TIAN B L, ZUO Z Y, YAN X M, et al Fixed-time output feedback control scheme for double integrator systems. Automatica, 2017, 80, 17- 24.
doi: 10.1016/j.automatica.2017.01.007 |
| 26 | NI J K, LIU L, LIU C X, et al Fast fixed-time nonsingular terminal sliding mode control and its application to chaos suppression in power system. IEEE Trans. on Circuits Systems-II: Express Briefs, 2016, 64 (2): 151- 155. |
| 27 |
CRUZ-ZAVALA E, MORENO J, FRIDMAN L Lyapunov-based design for a class of variable-gain 2nd-sliding controllers with the desired convergence rate. International Journal of Robust and Nonlinear Control, 2018, 28 (17): 5279- 5296.
doi: 10.1002/rnc.4310 |
| 28 | SHI S, GU J, XU S Y, et al Variable-gain second-order sliding mode controller with globally fixed-time stability guarantees. IEEE Trans. on Circuits Systems-II: Express Briefs, 2020, 67 (28): 1414- 1418. |
| 29 |
LOPEZ-RAMIREZ F, POLYAKOV A, EFIMOV D, et al Finite-time and fixed-time observer design: implicit Lyapunov function approach. Automatica, 2018, 87, 52- 60.
doi: 10.1016/j.automatica.2017.09.007 |
| 30 |
MENARD T, MOULAY E, PERRUQUETTI W Fixed-time observer with simple gains for uncertain systems. Automatica, 2017, 81, 438- 446.
doi: 10.1016/j.automatica.2017.04.009 |
| 31 |
RIOS H, TEEL A A hybrid fixed-time observer for state estimation of linear systems. Automatica, 2018, 87, 103- 112.
doi: 10.1016/j.automatica.2017.09.019 |
| 32 |
BHAT S, BERNSTEIN D Finite-time stability of continuous autonomous systems. SIAM Journal on Control and Optimization, 2000, 38 (3): 751- 766.
doi: 10.1137/S0363012997321358 |
| 33 | FILIPPOV A F. Mathematics and its applications. Differential equations with discontinuous right-hand sides. ARSCott F M, ed. Dordrecht: Kluwer Academic Publishers, 1988. |
| 34 |
ANGULO M, MORENO J, FRIDMAN L Robust exact uniformly convergent arbitrary order differentiator. Automatica, 2013, 49 (8): 2489- 2495.
doi: 10.1016/j.automatica.2013.04.034 |
| [1] | Xinjian MA, Shiqian LIU, Huihui CHENG. Civil aircraft fault tolerant attitude tracking based on extended state observers and nonlinear dynamic inversion [J]. Journal of Systems Engineering and Electronics, 2022, 33(1): 180-187. |
| [2] | Steven Xianchuan DING, Linlin LI, Bin JIANG. Unified control and detection framework and its applications: a review, some new results, and future perspectives [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 995-1013. |
| [3] | Abdollah AZIZI, Mehdi FOROUZANFAR. Stabilizing controller design for nonlinear fractional order systems with time varying delays [J]. Journal of Systems Engineering and Electronics, 2021, 32(3): 681-689. |
| [4] | Sheng LIU, He LIAO, Jinjin XIE, Yufei XU, Yi XU, Zhongxin TANG, Chuang YAO. A non-contact spacecraft architecture with extended stochastic state observer based control for gravity mission [J]. Journal of Systems Engineering and Electronics, 2021, 32(2): 460-472. |
| [5] | Zhen SHI, Yaen XIE, Chengchen DENG, Kun ZHAO, Yushan HE, Yong HAO. Disturbance observer based finite-time coordinated attitude tracking control for spacecraft on SO(3) [J]. Journal of Systems Engineering and Electronics, 2020, 31(6): 1274-1285. |
| [6] | Hongwei WANG, Penglong FENG. Fuzzy modeling of multirate sampled nonlinear systems based on multi-model method [J]. Journal of Systems Engineering and Electronics, 2020, 31(4): 761-769. |
| [7] | Yiru ZOU, Chunsheng LIU, Ke LU. Extended state observer based smooth switching control for tilt-rotor aircraft [J]. Journal of Systems Engineering and Electronics, 2020, 31(4): 815-825. |
| [8] | Lixiong LIN, Qing WANG, Bingwei HE, Xiafu PENG. Evaluation of fault diagnosability for nonlinear uncertain systems with multiple faults occurring simultaneously [J]. Journal of Systems Engineering and Electronics, 2020, 31(3): 634-646. |
| [9] | Junjie LIU, Mingwei SUN, Zengqiang CHEN, Qinglin SUN. High AOA decoupling control for aircraft based on ADRC [J]. Journal of Systems Engineering and Electronics, 2020, 31(2): 393-402. |
| [10] | Yandong LI, Ling ZHU, Yuan GUO. Observer-based multivariable fixed-time formation control of mobile robots [J]. Journal of Systems Engineering and Electronics, 2020, 31(2): 403-414. |
| [11] | Tianqing CHANG, Quandong WANG, Lei ZHANG, Na HAO, Wenjun DAI. Battlefield dynamic scanning and staring imaging system based on fast steering mirror [J]. Journal of Systems Engineering and Electronics, 2019, 30(1): 37-56. |
| [12] | Ligang GONG, Qing WANG, Chaoyang DONG. Switching disturbance rejection attitude control of near space vehicles with variable structure [J]. Journal of Systems Engineering and Electronics, 2019, 30(1): 167-179. |
| [13] | Ping MA, Denghui ZHANG, Songyan WANG, Tao CHAO. Integrated guidance and control design method based on finite-time state observer [J]. Journal of Systems Engineering and Electronics, 2018, 29(6): 1251-1262. |
| [14] | Jiayi TIAN, Shifeng ZHANG. Active disturbance rejected predictive functional control for space vehicles with RCS [J]. Journal of Systems Engineering and Electronics, 2018, 29(5): 1022-1035. |
| [15] | Xiaoyan LIN, Lingmei CHEN, Dongyun LIN, Weiyao LAN. Output regulation of singular linear systems with input saturation by composite nonlinear feedback control [J]. Journal of Systems Engineering and Electronics, 2018, 29(4): 834-843. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||