
Journal of Systems Engineering and Electronics ›› 2022, Vol. 33 ›› Issue (3): 497-510.doi: 10.23919/JSEE.2022.000050
• ELECTRONICS TECHNOLOGY • Next Articles
Keyi LI( ), Zhengkun GUO(), Gongjian ZHOU*()
), Zhengkun GUO(), Gongjian ZHOU*()
Received:2021-03-06
Accepted:2022-01-14
Online:2022-06-18
Published:2022-06-24
Contact:
Gongjian ZHOU
E-mail:likeyi@hit.edu.cn;guozkbetter@163.com;zhougj@hit.edu.cn
About author:Supported by:Keyi LI, Zhengkun GUO, Gongjian ZHOU. State estimation in range coordinate using range-only measurements[J]. Journal of Systems Engineering and Electronics, 2022, 33(3): 497-510.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks

Fig 1
Ground truth and measurements in the example with the initial heading perpendicular to the radial direction and the initial speed of 300 m/s"
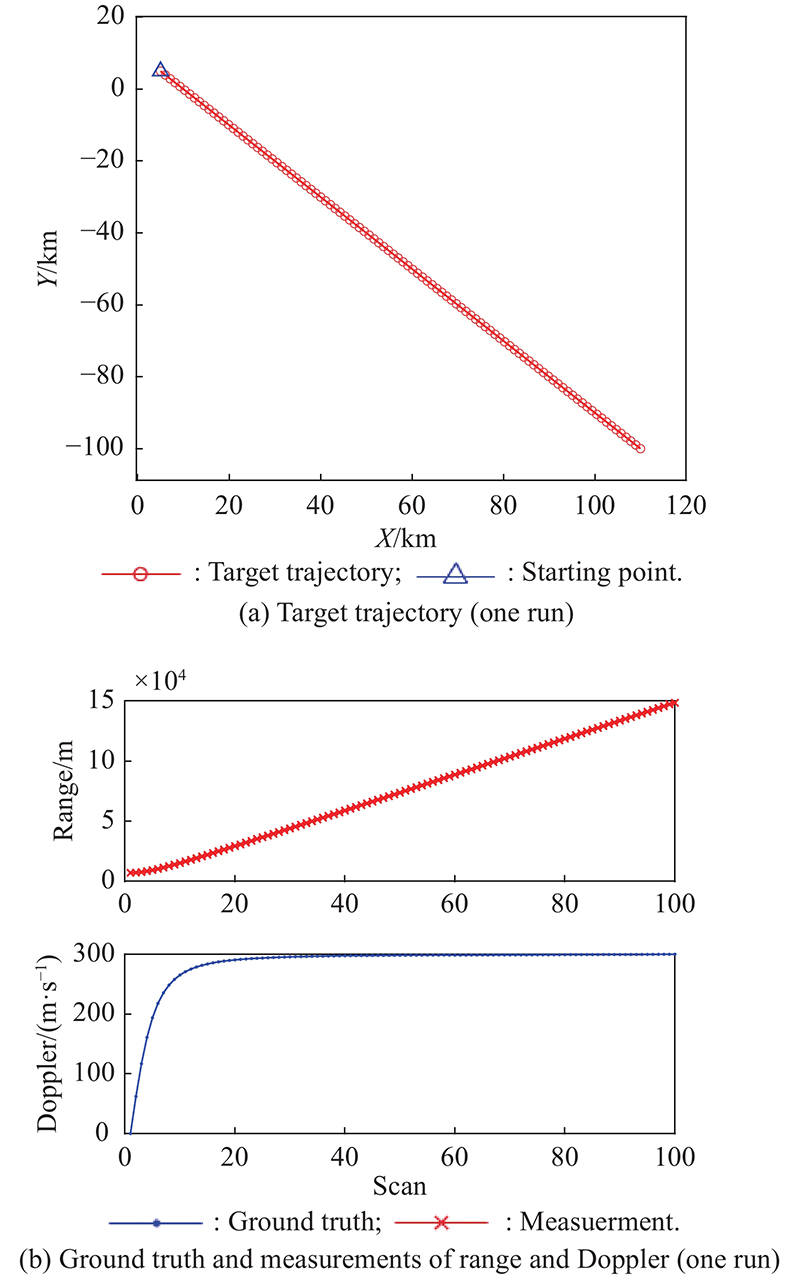

Fig 2
Comparison of filter RMSEs in the example with the initial heading perpendicular to the radial direction and the initial speed of 300 m/s"
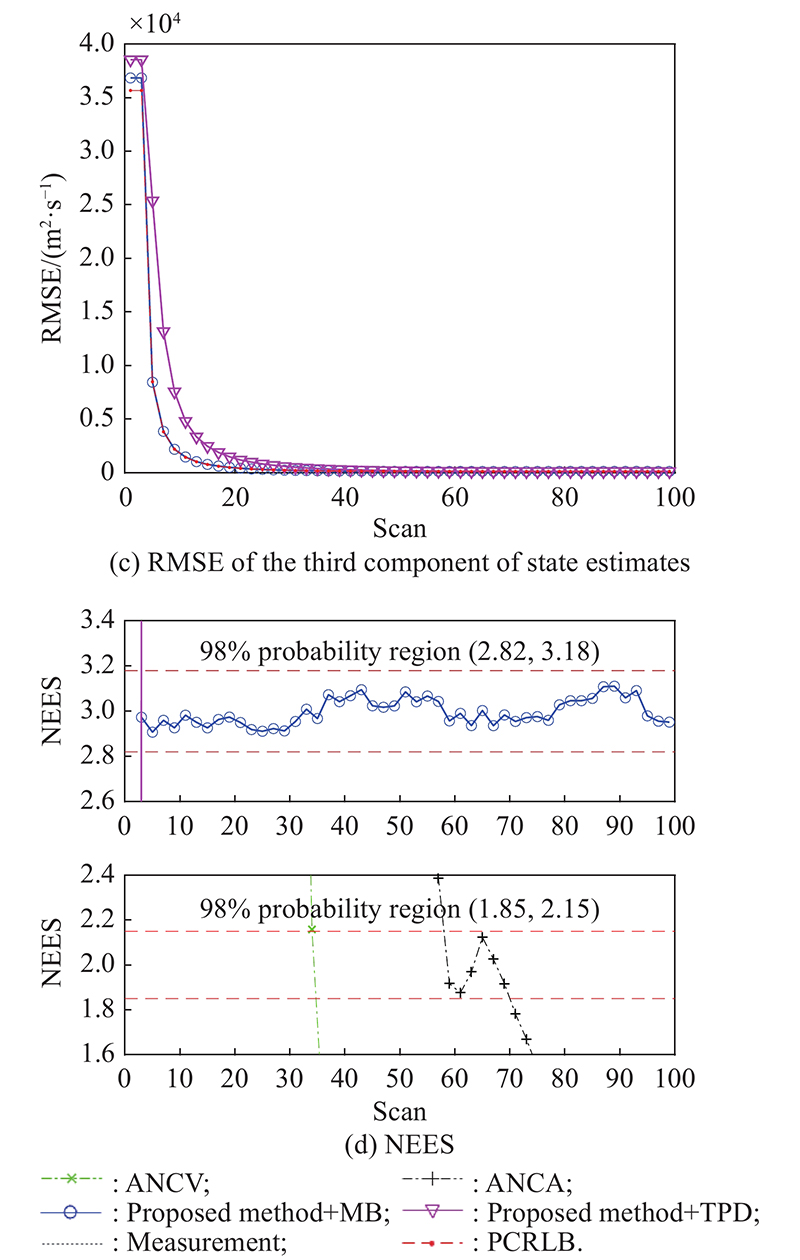

Fig 2
"
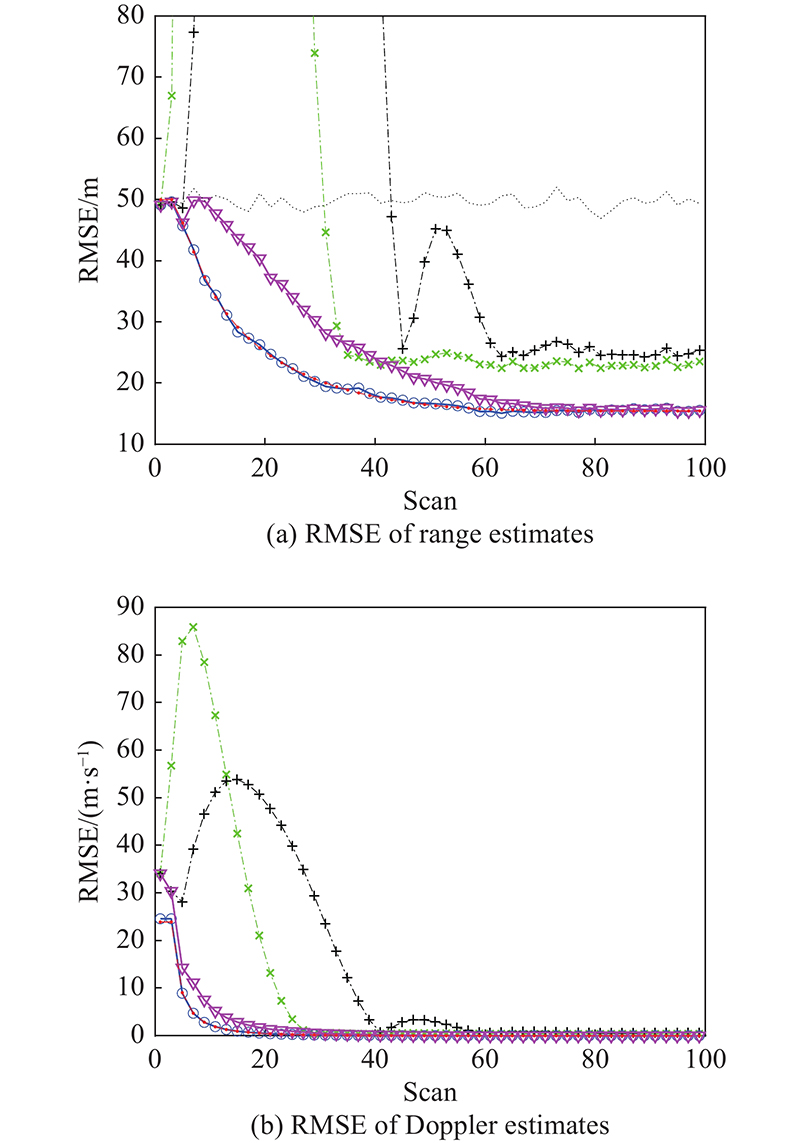
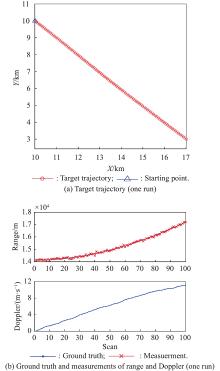
Fig 3
Ground truth and measurements in the example with the initial heading perpendicular to the radial direction and the initial speed of 20 m/s"
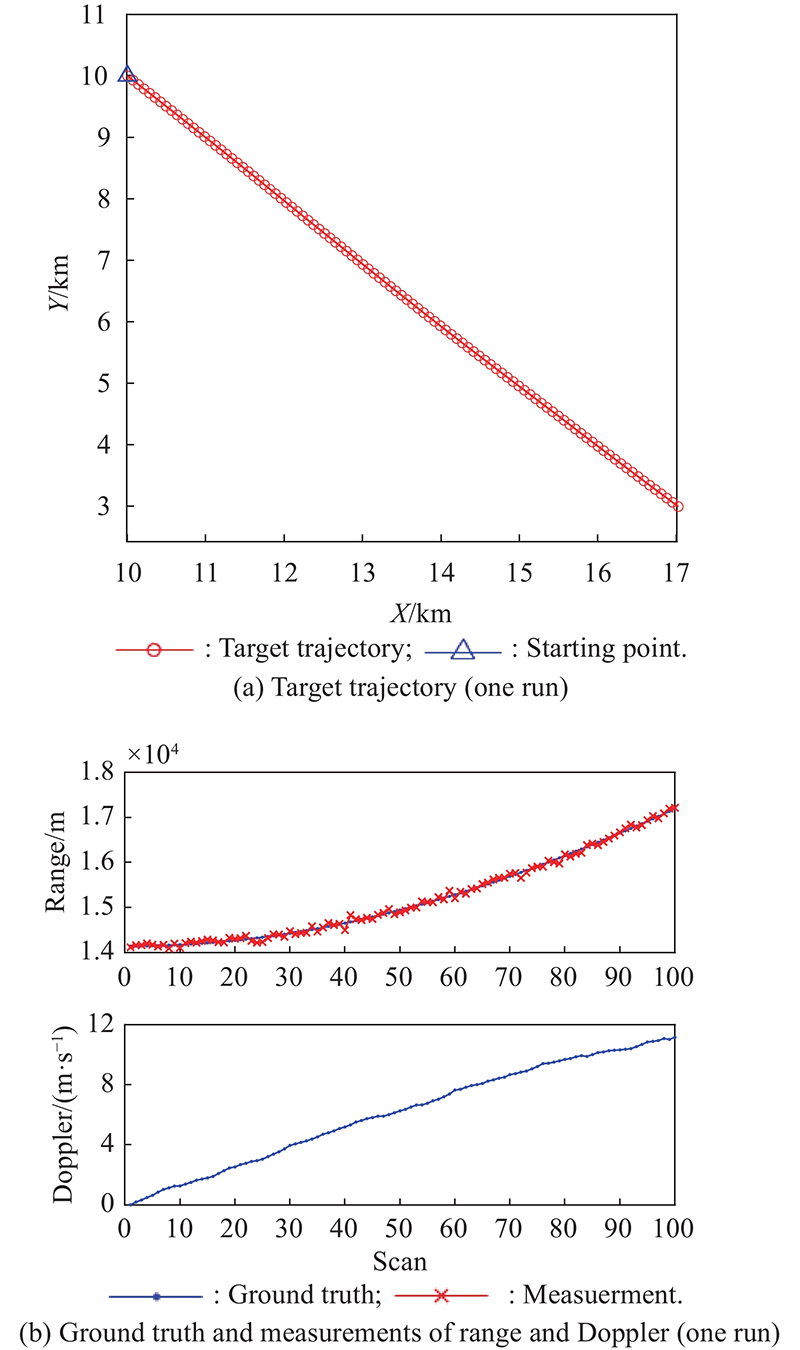
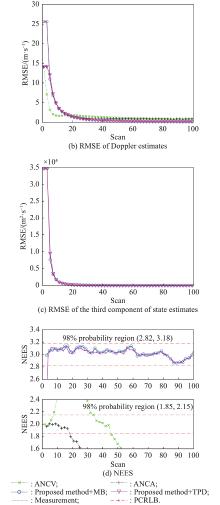
Fig 4
Comparison of filter RMSEs in the example with the initial heading perpendicular to the radial direction and the initial speed of 20 m/s"
Fig 4
"
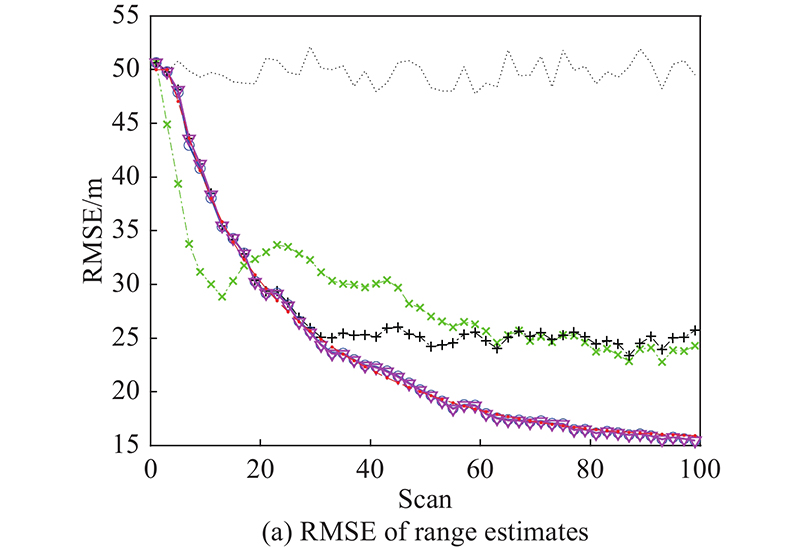
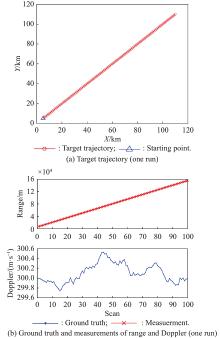
Fig 5
Ground truth and measurements in the example with the initial heading in the radial direction and the initial speed of 300 m/s"
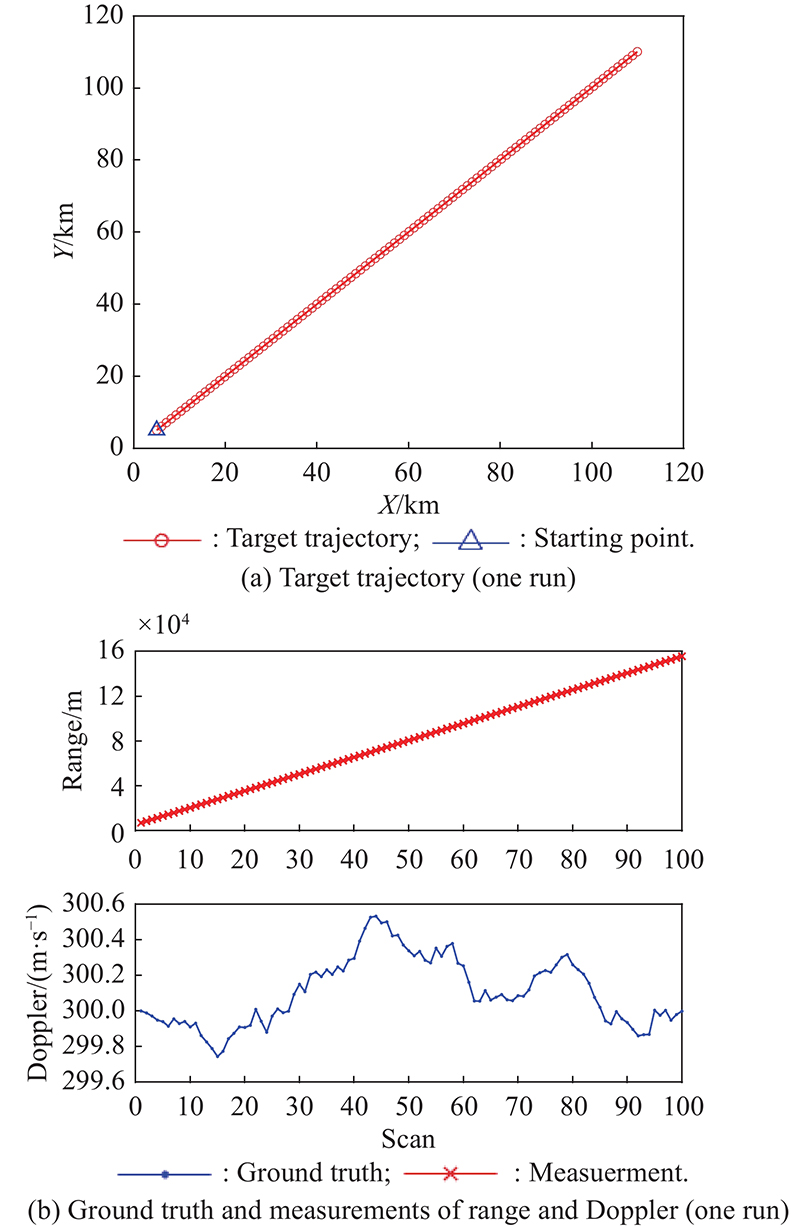
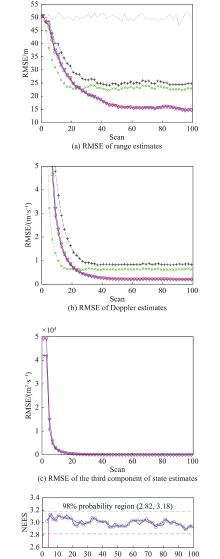
Fig 6
"
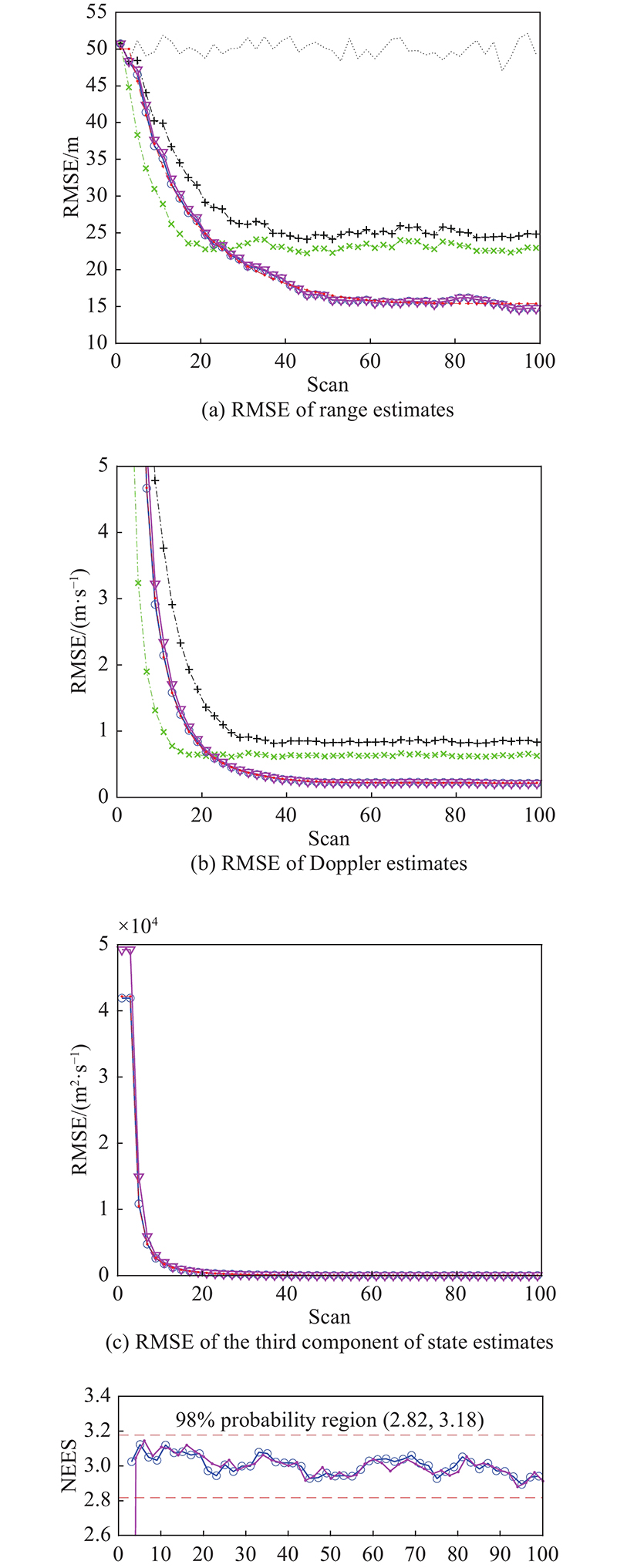
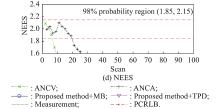
Fig 6
Comparison of filter RMSEs in the example with the initial heading in the radial direction and the initial speed of 300 m/s"
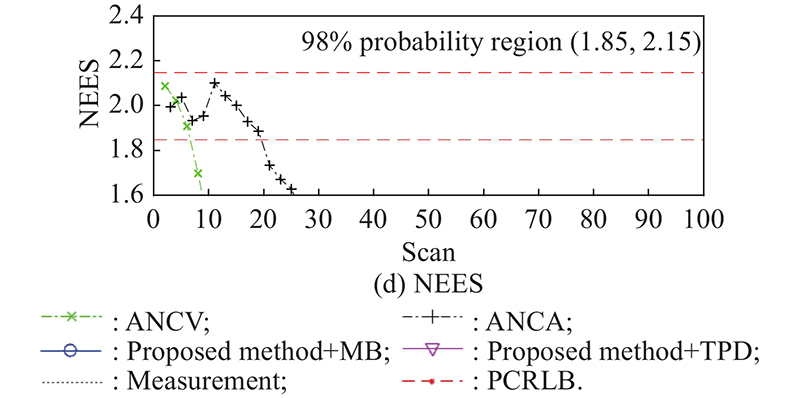
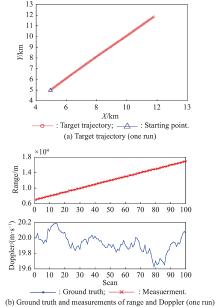
Fig 7
Ground truth and measurements in the example with the initial heading in the radial direction and the initial speed of 20 m/s"
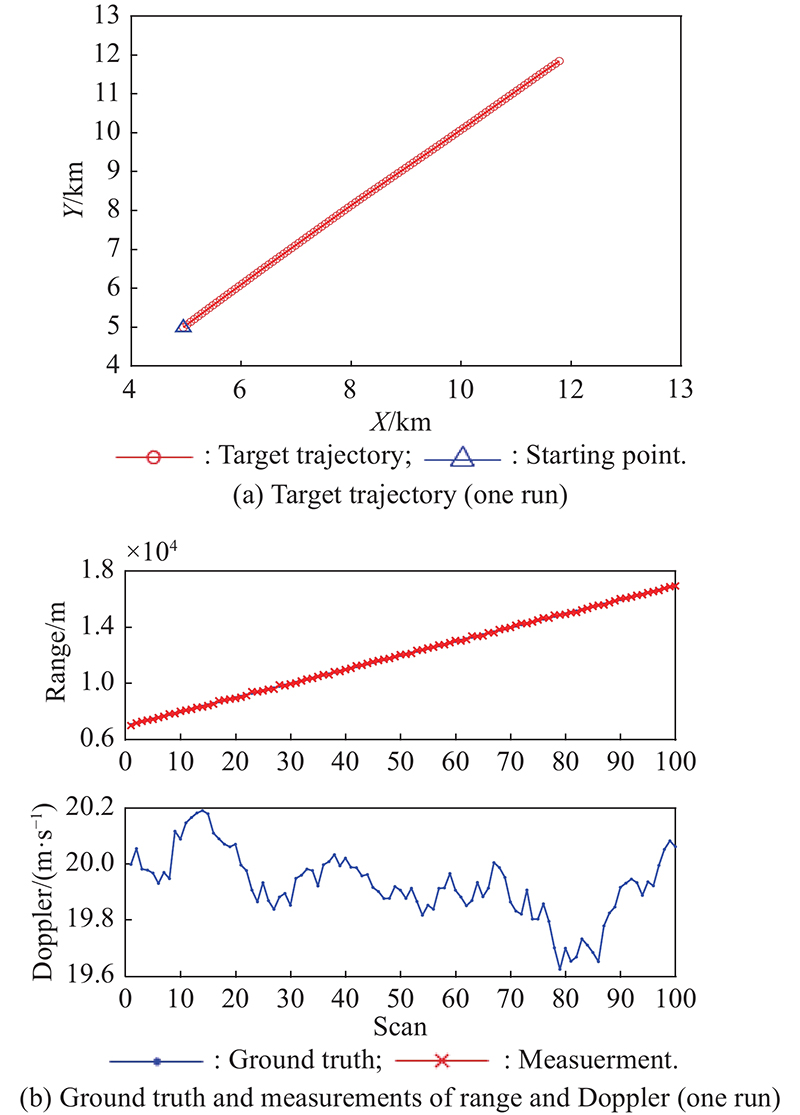
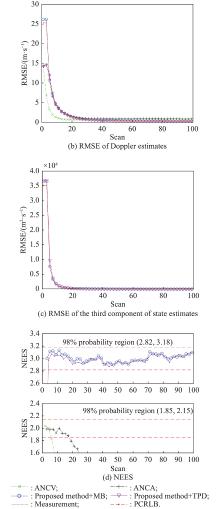
Fig 8
Comparison of filter RMSEs in the example with the initial heading in the radial direction and the initial speed of 20 m/s"
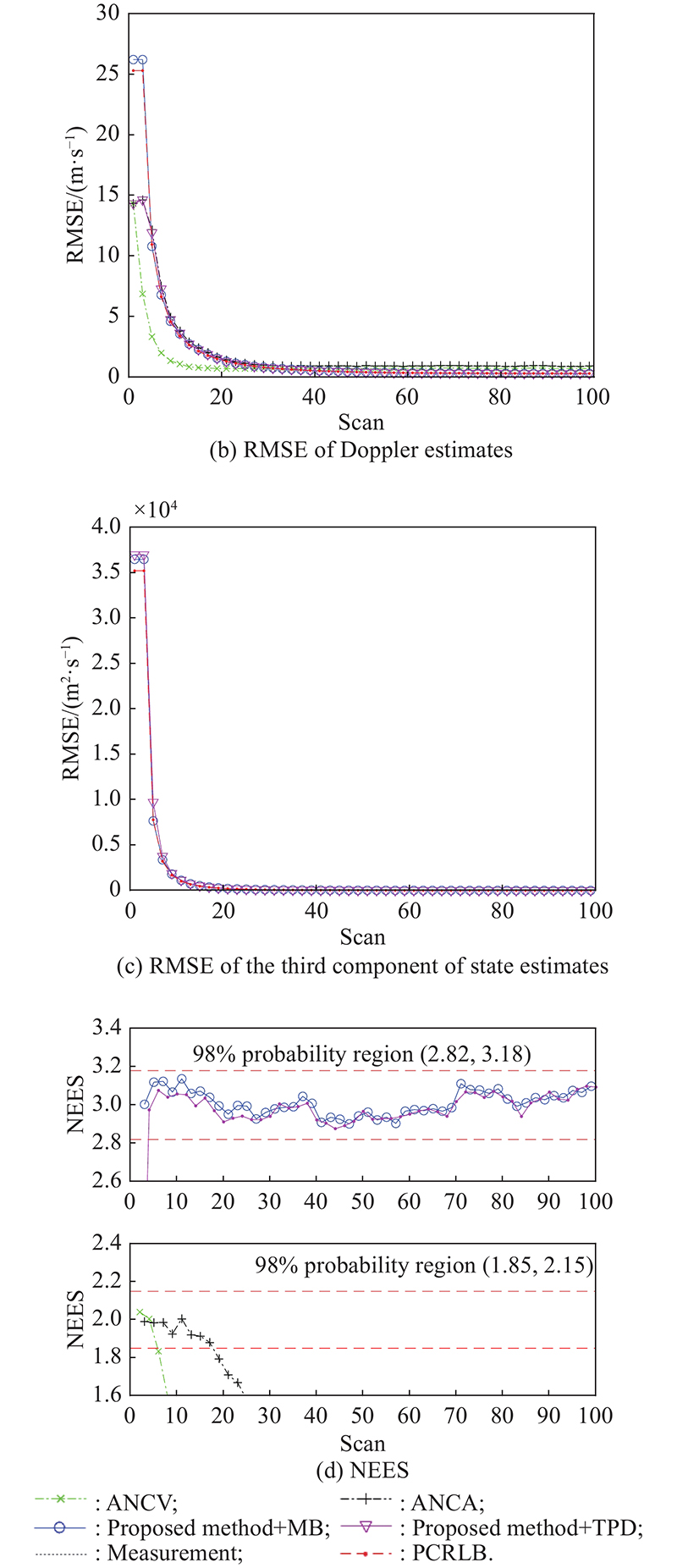
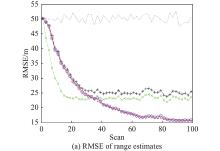
Fig 8
"
| 1 |
BRANKO R, SANJEEV A, JAMES M Target motion analysis using range-only measurements: algorithms, performance and application to ISAR data. Signal Processing, 2002, 82 (2): 273- 296.
doi: 10.1016/S0165-1684(01)00187-6 |
| 2 | ZHOU G J, ZHOU J F, FU T J, et al Multisensor-multitarget tracking based on hierarchical association only using range-Doppler measurements. Proc. of the IET International Radar Conference, 2013, 327- 340. |
| 3 | TOBIAS M, LANTERMAN A D A probability hypothesis density-based multitarget tracker using multiple bistatic range and velocity measurements. Proc. of the 36th Southeastern Symposium on System Theory, 2004, 205- 209. |
| 4 | JAUFFRET C, PEREZ A, PILLON D. Observability: range-only versus bearings-only target motion analysis when the observer maneuvers smoothly. IEEE Trans. on Aerospace and Electronic Systems, 2017, 53(6): 2814–2832. |
| 5 |
PILLON D, PEREZ-PIGNOL A, JAUFFRET C Observability: range-only vs. bearings-only target motion analysis for a leg-by-leg observers trajectory. IEEE Trans. on Aerospace and Electronic Systems, 2016, 52 (4): 1667- 1678.
doi: 10.1109/TAES.2016.150016 |
| 6 | SONG T L. Observability of target tracking with range-only measurements. IEEE Journal of Oceanic Engineering, 1999, 24(3): 383–387. |
| 7 | COLEMAN D, BOPARDIKAR S D, TAN X, Observability-aware target tracking with range only measurement. Proc. of the American Control Conference, 2021: 1–8. |
| 8 | CLARK J M, KOUNTOURIOTIS P A, VINTER R B. A Gaussian mixture filter for range-only tracking. IEEE Trans. on Automatic Control, 2011, 56(3): 602–613. |
| 9 | MANOLAKIS D E. Efficient solution and performance analysis of 3-D position estimation by trilateration. IEEE Trans. on Aerospace and Electronic Systems, 1996, 32(4): 1239–1248. |
| 10 | DEMING R, SCHINDLER J, PERLOVSKY L. Multi-target/multi-sensor tracking using only range and Doppler measurements. IEEE Trans. on Aerospace and Electronic Systems, 2009, 45(2): 593–611. |
| 11 | MASHHADANI W A, DANOON L, BROWN A. Modeling range-only multistatic radar target detection with interval analysis in 3D. Proc. of the European Radar Conference, 2016: 173–176. |
| 12 | PETSIOS M N, ALIVIZATOS E G, UZUNOGLU N K. Manoeuvring target tracking using multiple bistatic range and range-rate measurements. Signal Processing, 2007, 87(4): 665–686. |
| 13 | YANG X S, ZHANG W A, LIU A D, et al. Linear fusion estimation for range-only target tracking with nonlinear transformation. IEEE Trans. on Industrial Informatics, 2020, 16(10): 6403–6412. |
| 14 | ZHAO Y S, HU D X, ZHAO Y J, et al. Moving target localization for multistatic passive radar using delay, Doppler and Doppler rate measurements. Journal of Systems Engineering and Electronics, 2020, 31(5): 939–949. |
| 15 | PACHOLSKA M, DUMBGEN F, SCHOLEFIELD A. Relax and recover: guaranteed range-only continuous localization. IEEE Robotics and Automation Letter, 2020, 5(2): 2248–2255. |
| 16 | SADEGHI M, BEHNIA F, AMIRI R. Optimal sensor placement for 2-D range-only target localization in constrained sensor geometry. IEEE Trans. on Signal Processing, 2020, 68: 2316–2327. |
| 17 | DASH D, JAYARAMAN V. A probabilistic model for sensor fusion using range-only measurements in multistatic radar. IEEE Sensors Letter, 2020, 4(6): 7500604. |
| 18 | MA H, ANTONIOU M, STOVE A G, et al. Target kinematic state estimation with passive multistatic radar. IEEE Trans. on Aerospace and Electronic Systems, 2021, 57(4): 2121–2134. |
| 19 | BARRICK D. History, present status, and future directions of HF surface-wave radars in the U S. Proc. of the International Conference on Radar, 2003, 652- 655. |
| 20 | GRIFFITHS H. Multistatic, MIMO and networked radar: the future of radar sensors Proc. of the 7th European Radar Conference, 2010, 81- 84. |
| 21 | ZHOU G J, GUO Z K, LI K Y, et al. Motion modeling and state estimation in range-Doppler plane. Aerospace Science and Technology, 2021, 115: 106792. |
| 22 | LI K Y, GUO Z K, ZHOU G J. Nearly constant acceleration model for state estimation in the range-Doppler plane. IET Radar, Sonar & Navigation, 2021, 15(12): 1687–1701. |
| 23 | JULIER S J, UHLMANN J K, DURRANT-WHYTE H F. A new method for nonlinear transformation of means and covariances in filters and estimates. IEEE Trans. on Automatic Control, 2000, 45(3): 477–482. |
| 24 | JULIER S J, UHLMANN J K. Unscented filtering and nonlinear estimation. Proceedings of the IEEE, 2004, 92(3): 401–422. |
| 25 | WAN E A, VAN D M R. The unscented Kalman filter for nonlinear estimation Proc. of IEEE Symposium on Adaptive Systems for Signal Processing, Communication and Control, 2000, 153- 158. |
| 26 |
LIU C Y, SHUI P L, WEI G, et al Modified unscented Kalman filter using modified filter gain and variance scale factor for highly maneuvering target tracking. Journal of Systems Engineering and Electronics, 2014, 25 (3): 380- 385.
doi: 10.1109/JSEE.2014.00043 |
| 27 |
DENG F, CHEN J, CHEN C Adaptive unscented Kalman filter for parameter and state estimation of nonlinear high-speed objects. Journal of Systems Engineering and Electronics, 2013, 24 (4): 655- 665.
doi: 10.1109/JSEE.2013.00076 |
| 28 | GUO Z K, ZHOU G J. State estimation from range-only measurements Proc. of the 23rd International Conference on Information Fusion, 2020, 367- 372. |
| 29 | ZHOU G J, PELLETIER M G, KIRUBARAJAN T, et al. Statically fused converted position and Doppler measurement Kalman filters. IEEE Trans. on Aerospace and Electronic Systems, 2014, 50(1): 300–318. |
| 30 | ZHOU G J, WU L G, XIE J H, et al. Constant turn model for statically fused converted measurement Kalman filters. Signal Processing, 2015, 108: 400–411. |
| 31 | ARASARATNAM I, HAYKIN S. Cubature Kalman filter. IEEE Trans. on Automatic Control, 2009, 54(6): 1254–1269. |
| 32 | SHI J, QI G Q, LI Y Y, et al. Stochastic convergence analysis of cubature Kalman filter with intermittent observations. Journal of Systems Engineering and Electronics, 2018, 29(4): 823–833. |
| 33 | ARULAMPALAM M S, MASKELL S, GORDON N, et al. A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking. IEEE Trans. on Signal Processing, 2002, 50(2): 174–188. |
| 34 | DAN C, DOUCET A. A survey of convergence results on particle filtering methods for practitioners. IEEE Trans. on Signal Processing, 2002, 50(3): 736–746. |
| 35 | ZHANG Y, WANG S F, LI J C. Improved particle filtering techniques based on generalized interactive genetic algorithm. Journal of Systems Engineering and Electronics, 2016, 27(1): 242–250. |
| 36 | ZUO J Y, ZHONG X P. Particle filter for nonlinear systems with multi-sensor asynchronous random delays. Journal of Systems Engineering and Electronics, 2017, 28(6): 1064–1071. |
| 37 | TICHAVSKY P, MURAVCHIK C H, NEHORAI A. Posterior Cramer-Rao bounds for discrete-time nonlinear filter. IEEE Trans. on Signal Processing, 1998, 46(5): 1386–1396. |
| 38 |
LI X R, JILKOV V P. Survey of maneuvering target tracking Part I: dynamic models. IEEE Trans. on Aerospace and Electronic Systems, 2003, 39 (4): 1333- 1364.
doi: 10.1109/TAES.2003.1261132 |
| 39 | BAR-SHALOM Y, LI X R, KIRUBARAJAN T. Estimation with applications to tracking and navigation: theory, algorithms, and software. New York: Wiley, 2001. |
| [1] | Zhuanhua ZHANG, Gongjian ZHOU. Maneuvering target state estimation based on separate modeling of target trajectory shape and dynamic characteristics [J]. Journal of Systems Engineering and Electronics, 2022, 33(5): 1195-1209. |
| [2] | Yuanshi ZHANG, Minghai PAN, Weijun LONG, Hua LI, Qinghua HAN. Joint waveform selection and power allocation algorithm in manned/unmanned aerial vehicle hybrid swarm based on chance-constraint programming [J]. Journal of Systems Engineering and Electronics, 2022, 33(3): 551-562. |
| [3] | Muhammad WASIM, Ahsan ALI. Airship aerodynamic model estimation using unscented Kalman filter [J]. Journal of Systems Engineering and Electronics, 2020, 31(6): 1318-1329. |
| [4] | Chen TIAN, Yang PEI, Peng HOU, Qian ZHAO. Multi-target tracking algorithm based on PHD filter against multi-range-false-target jamming [J]. Journal of Systems Engineering and Electronics, 2020, 31(5): 859-870. |
| [5] | Yang SU, Ting CHENG, Zishu HE, Xi LI, Yanxi LU. Adaptive resource management for multi-target tracking in co-located MIMO radar based on time-space joint allocation [J]. Journal of Systems Engineering and Electronics, 2020, 31(5): 916-927. |
| [6] | Haoran SHI, Faxing LU, Hangyu WANG, Junfei XU. Optimal observation configuration of UAVs based on angle and range measurements and cooperative target tracking in three-dimensional space [J]. Journal of Systems Engineering and Electronics, 2020, 31(5): 996-1008. |
| [7] | Zhichao BAO, Qiuxi JIANG, Fangzheng LIU. Multiple model efficient particle filter based track-before-detect for maneuvering weak targets [J]. Journal of Systems Engineering and Electronics, 2020, 31(4): 647-656. |
| [8] | Lili SUN, Yunhe CAO, Wenhua WU, Yutao LIU. A multi-target tracking algorithm based on Gaussian mixture model [J]. Journal of Systems Engineering and Electronics, 2020, 31(3): 482-487. |
| [9] | Haowei ZHANG, Junwei XIE, Jiaang GE, Zhaojian ZHANG, Wenlong LU. Finite sensor selection algorithm in distributed MIMO radar for joint target tracking and detection [J]. Journal of Systems Engineering and Electronics, 2020, 31(2): 290-302. |
| [10] | Haowei ZHANG, Junwei XIE, Junpeng SHI, Zhaojian ZHANG. Antenna selection in MIMO radar with collocated antennas [J]. Journal of Systems Engineering and Electronics, 2019, 30(6): 1119-1131. |
| [11] | Mahmoudreza HADAEGH, Hamid KHALOOZADEH, Mohammadtaghi BEHESHTI. Augmented input estimation in multiple maneuvering target tracking [J]. Journal of Systems Engineering and Electronics, 2019, 30(5): 841-851. |
| [12] | Hongwei ZHANG, Weixin XIE. Constrained auxiliary particle filtering for bearings-only maneuvering target tracking [J]. Journal of Systems Engineering and Electronics, 2019, 30(4): 684-695. |
| [13] | Na'e ZHENG, Yang SUN, Xiyu SONG, Song CHEN. Joint resource allocation scheme for target tracking in distributed MIMO radar systems [J]. Journal of Systems Engineering and Electronics, 2019, 30(4): 709-719. |
| [14] | Qiming YANG, Jiandong ZHANG, Guoqing SHI. Modeling of UAV path planning based on IMM under POMDP framework [J]. Journal of Systems Engineering and Electronics, 2019, 30(3): 545-554. |
| [15] | Zheng QIN, Yan'gang LIANG. Sensor management of LEO constellation based on covariance control [J]. Journal of Systems Engineering and Electronics, 2019, 30(2): 393-401. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||