
Journal of Systems Engineering and Electronics ›› 2022, Vol. 33 ›› Issue (2): 406-425.doi: 10.23919/JSEE.2022.000042
• CONTROL THEORY AND APPLICATION • Previous Articles Next Articles
Yangyang JIANG1( ), Yan GAO2(), Wenqi SONG2(), Yue LI2(), Quan QUAN2,*()
), Yan GAO2(), Wenqi SONG2(), Yue LI2(), Quan QUAN2,*()
Received:2021-08-24
Online:2022-05-06
Published:2022-05-06
Contact:
Quan QUAN
E-mail:yangyang@buaa.edu.cn;buaa_gaoyan@buaa.edu.cn;jnswqno1@163.com;liyue9556@buaa.edu.cn;qq_buaa@buaa.edu.cn
About author:Yangyang JIANG, Yan GAO, Wenqi SONG, Yue LI, Quan QUAN. Bibliometric analysis of UAV swarms[J]. Journal of Systems Engineering and Electronics, 2022, 33(2): 406-425.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks

Fig 1
Main research projects and strategic plans of the USA and European Union"
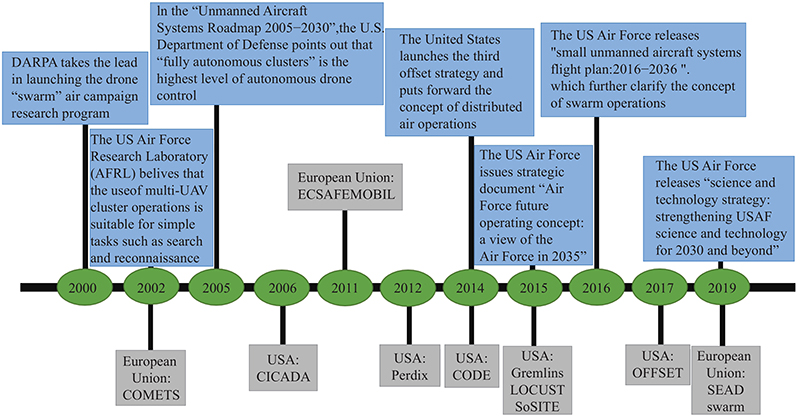
Table 1
Major research projects"
| Country/Organization | Project | Description |
| USA | 2006:CICADA | Close-in covert autonomous disposable aircraft |
| 2012:Perdix | Collective decision making, adaptive formation flying, and self-healing | |
| 2014:CODE | Collaborative operations in denied environment system | |
| 2015:Gremlins | Develop and demonstrate the ability to air-launch and air-recover up to drones | |
| 2015:LOCUST | Low-cost UAV swarming technology | |
| 2015:SoSITE | System of systems integration technology and experimentation | |
| 2015:LCAAT | Low-cost attritable aircraft technology | |
| 2017:OFFSET | Offensive swarm-enabled tactics | |
| European Union | 2002:COMETS | Real-time coordination and control of multiple heterogeneous UAVs |
| 2011:ECSAFEMOBIL | The estimation and control project of the high mobility collaborative industrial system for secure wireless | |
| 2019:SEAD Swarm | Suppression of enemy air defenses | |
| Russia | 2019:Launched “Flock-93” combat demonstration system | “Flock-93” will be flying wings and have vertical take-off and landing capability, promising both flexibility and target range of around 95 miles |
| 2019:Tsentr-2019 | Orlan-10 unmanned aircraft, as well as other variants of that drone with sensor and electronic warfare payloads, to locate and try to destroy critical air defense systems, command posts, communications nodes | |
| 2020: “Grom” UAV | Performing intelligence, surveillance, strike, and electronic warfare missions either on its own, as a loyal wing working together with a manned aircraft, or in a networked autonomous swarm | |
| China | 2016:67 fixed-wing UAV swarms test | It broke the previous record of 50 fixed-wing UAV clusters held by the US Navy |
| 2017:119 fixed-wing UAV swarms test | Dense ejection take-off, air assembly, multi-target grouping, formation encirclement, swarm operation |

Fig 2
Collective behaviors"

Table 2
Basic keywords"
| Searching formula | Topic search |
| Formula 1 | TS = “swarm UAV*” OR “UAV swarm” OR “swarm drone*” OR “drone swarm” OR “swarm robot*” OR “robot* swarm” OR “swarm vehicle*” OR “vehicle swarm” OR “formation UAV*” OR “UAV formation” OR “drone formation” OR “formation drone*” OR “formation robot*” OR “robot* formation” OR “formation vehicle*” OR “vehicle formation” OR “team UAV*” OR “UAV team” OR “drone team” OR “team robot*” OR “robot* team” OR “team vehicle*” OR “vehicle team” OR “multi-UAV*” OR “multi-drone*” OR “multi-robot*” OR “multi-vehicle*” OR “multiple UAV” OR “multiple drone*” OR “multiple robot*” OR “multiple vehicle*” OR “distributed UAV*” OR “distributed drone*” OR “distributed robot*” OR “distributed vehicle*” OR “collective UAV*” OR “collective robot*” OR “collective vehicle*” |
| Formula 2 | TS = “swarm UAV*” OR “UAV swarm” OR “swarm drone*” OR “drone swarm” OR “swarm robot*” OR “robot* swarm” OR “formation UAV*” OR “UAV formation” OR “drone formation” OR “formation drone*” OR “formation robot*” OR “robot* formation” OR “team UAV*” OR “UAV team” OR “drone team” OR “team robot*” OR “robot* team” OR “multi-UAV*” OR “multi-drone*” OR “multi-robot*” OR “multiple UAV” OR “multiple drone*” OR “multiple robot*” OR “distributed UAV*” OR “distributed drone*” OR “distributed robot*” |
| Formula 3 | TS = “Swarm UAV*” OR “UAV swarm” OR “swarm drone*” OR “drone swarm” OR “formation UAV*” OR “UAV formation” OR “drone formation” OR “formation drone*” OR “team UAV*” OR “UAV team” OR “drone team” OR “multi-UAV*” OR “multi-drone*” OR “multiple UAV” OR “multiple drone*” OR “distributed UAV*” OR “distributed drone*” |
Fig 3
Number of documents published from 2000 to 2021"
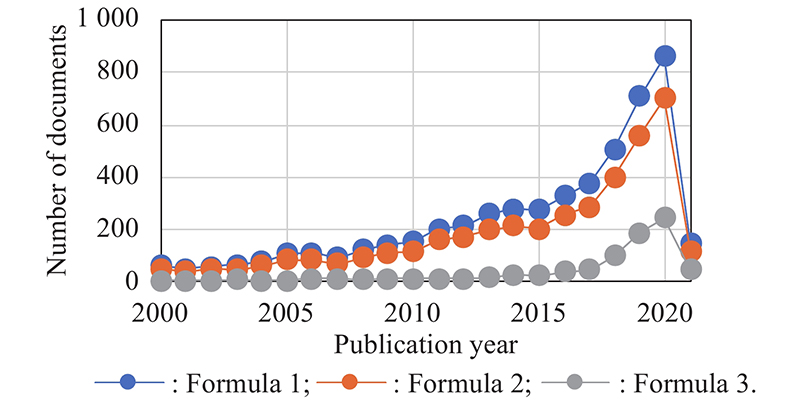
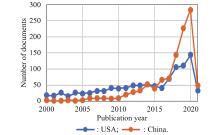
Fig 4
Number of documents published in the USA and China"
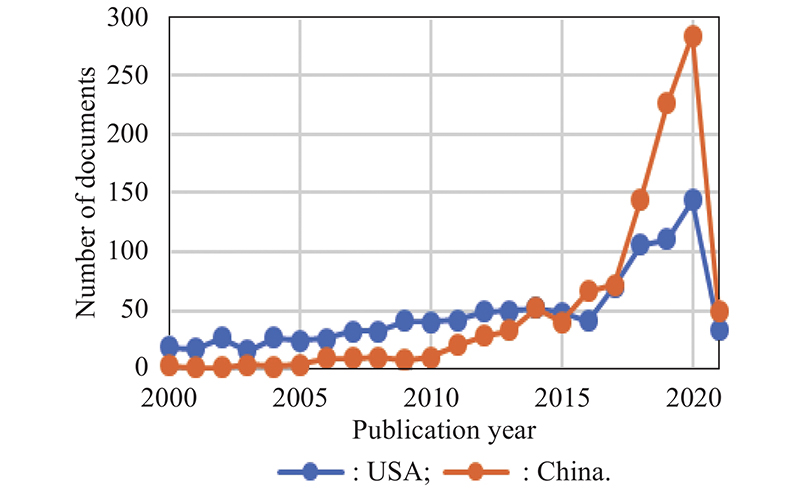
Table 3
TOP 9 countries with the strongest citation bursts"
| Countries | Strength | Begin | End |
| USA | 4.72 | 2010 | 2010 |
| Portugal | 8.74 | 2011 | 2016 |
| Germany | 5.98 | 2011 | 2013 |
| Spain | 4.14 | 2013 | 2013 |
| Switzerland | 2.97 | 2014 | 2014 |
| Russia | 2.58 | 2015 | 2015 |
| Brazil | 4.76 | 2016 | 2017 |
| Saudi Arabia | 3.02 | 2020 | 2021 |
| Finland | 2.69 | 2020 | 2021 |
Table 4
The most productive countries/regions"
| Rank | Country/region | Document | Citation | Total link strength | Link |
| 1 | China | 1017 | 10279 | 393 | 46 |
| 2 | USA | 780 | 14237 | 396 | 50 |
| 3 | Spain | 212 | 3150 | 121 | 30 |
| 4 | England | 188 | 2700 | 176 | 35 |
| 5 | Italy | 182 | 2640 | 164 | 34 |
| 6 | South Korea | 182 | 1712 | 66 | 15 |
| 7 | Canada | 150 | 2143 | 131 | 27 |
| 8 | India | 139 | 1497 | 70 | 28 |
| 9 | Germany | 133 | 2136 | 121 | 30 |
| 10 | Japan | 113 | 1083 | 64 | 20 |

Fig 5
Co-author analysis of countries/regions"
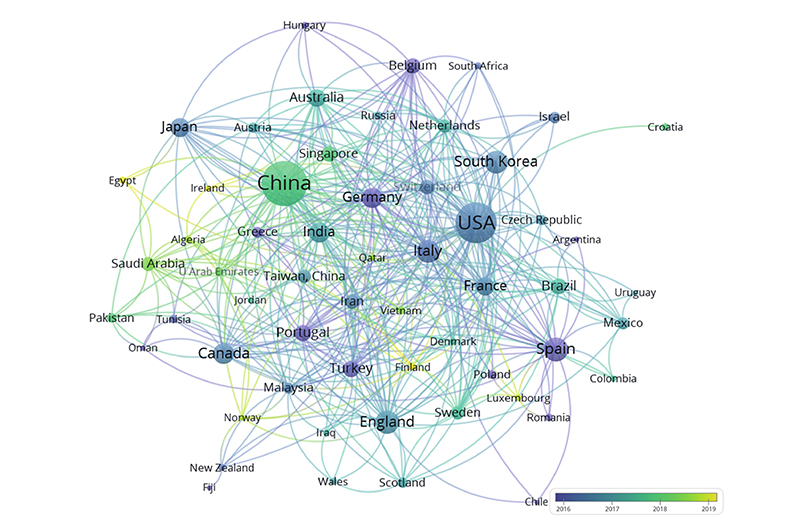

Fig 6
Co-author analysis of countries/regions with China"
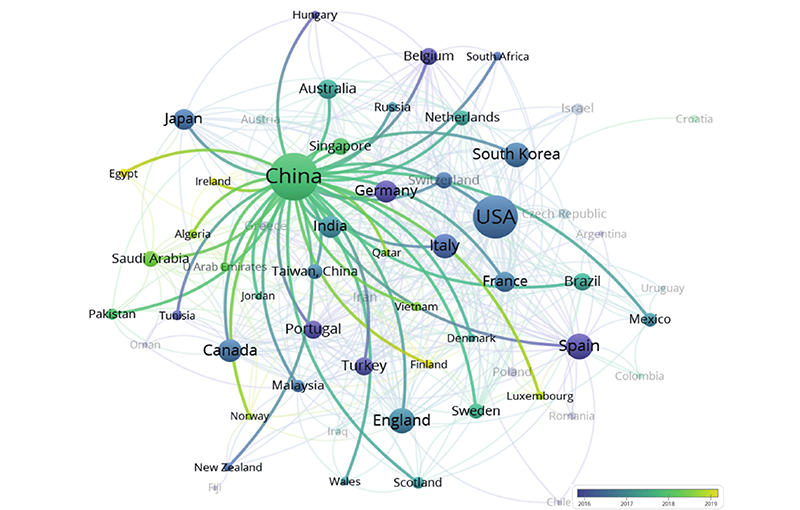

Fig 7
Co-author analysis of countries/regions with the USA"
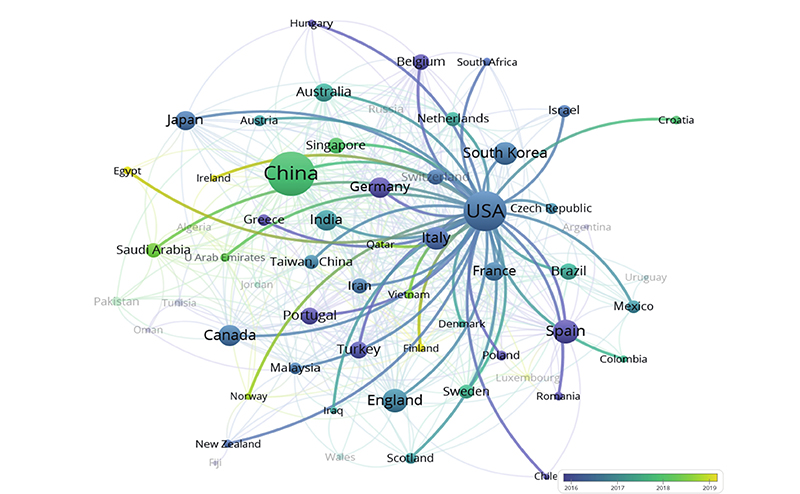
Table 5
Institutions"
| Rank | Organization | Document | Citation | Total link strength | Link |
| 1 | NUDT | 79 | 266 | 69 | 46 |
| 2 | Beihang University | 75 | 936 | 84 | 65 |
| 3 | MIT | 70 | 1477 | 109 | 79 |
| 4 | Northwestern Polytechnical University | 63 | 444 | 69 | 42 |
| 5 | Beijing Institute of Technology | 46 | 468 | 54 | 42 |
| 6 | Tsinghua University | 45 | 973 | 91 | 59 |
| 7 | Université Libre de Bruxelles | 43 | 1535 | 62 | 46 |
| 8 | Carnegie Mellon University | 41 | 1255 | 54 | 43 |
| 9 | Chinese Academy of Sciences | 41 | 235 | 96 | 60 |
| 10 | Nanyang Technological University | 39 | 393 | 45 | 34 |
Fig 8
Top three institutions"
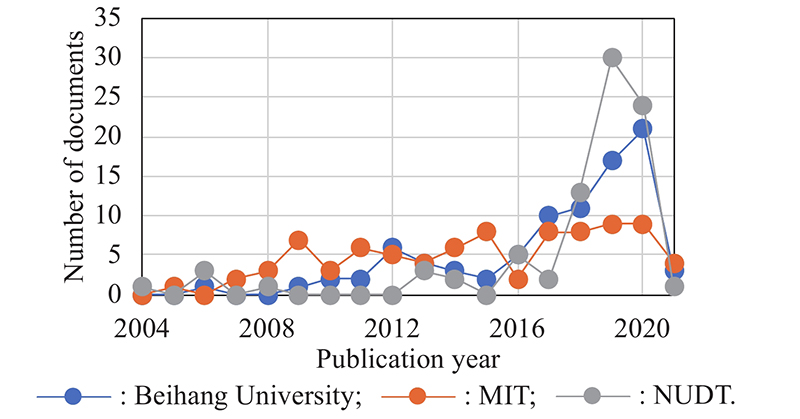

Fig 9
Collaborative network of institutions"
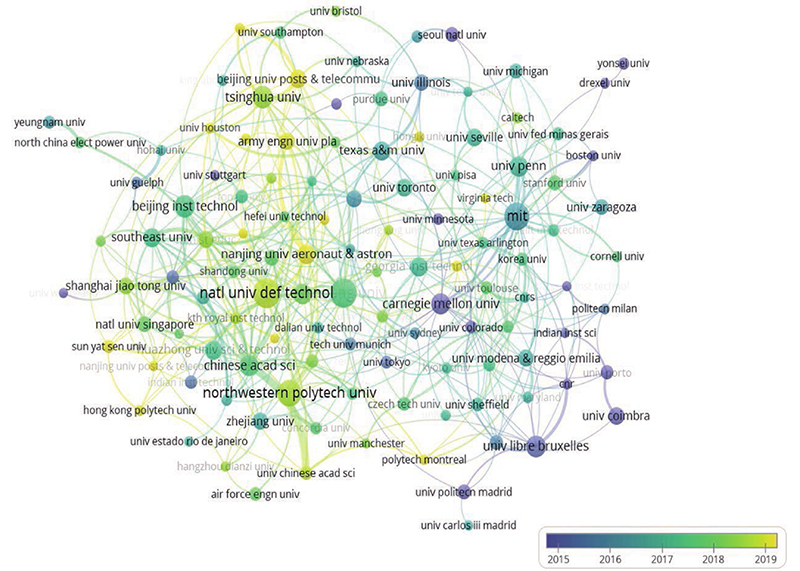
Table 6
Research fields"
| Rank | Subject | Document |
| 1 | Computer science | 1420 |
| 2 | Engineering | 1330 |
| 3 | Robotics | 1164 |
| 4 | Automation control systems | 697 |
| 5 | Telecommunications | 440 |
| 6 | Instruments instrumentation | 310 |
| 7 | Chemistry | 194 |
| 8 | Mathematics | 157 |
| 9 | Physics | 146 |
| 10 | Materials science | 98 |
| 11 | Operations research management science | 94 |
| 12 | Science technology (other topics) | 90 |
| 13 | Transportation | 51 |
| 14 | Mechanics | 37 |
| 15 | Psychology | 27 |
| 16 | Neurosciences neurology | 21 |
| 17 | Construction building technology | 13 |
| 18 | Environmental sciences ecology | 12 |
| 19 | Oceanography | 12 |
| 20 | Social sciences (other topics) | 12 |
Table 7
Journals"
| Rank | Journal | Document | 2020 impact factor | JCR partition |
| 1 | IEEE Access | 192 | 3.367 | Q2 |
| 2 | IEEE Robotics and Automation Letters | 157 | 3.741 | Q2 |
| 3 | Robotics and Autonomous Systems | 148 | 3.12 | Q2 |
| 4 | Journal of Intelligent Robotic Systems | 136 | 2.646 | Q2 |
| 5 | IET Control Theory and Applications | 125 | 3.527 | Q1 |
| 6 | Autonomous Robots | 115 | 3.0 | Q2 |
| 7 | Sensors | 113 | 3.576 | Q1 |
| 8 | International Journal of Robotics Research | 108 | 4.703 | Q1 |
| 9 | International Journal of Advanced Robotic Systems | 97 | 1.652 | Q4 |
| 10 | IEEE Transactions on Robotics | 76 | 5.567 | Q1 |
| 11 | Applied Sciences Basel | 67 | 2.679 | Q2 |
| 12 | Robotica | 63 | 2.088 | Q3 |
| 13 | Swarm Intelligence | 52 | 2.143 | Q3 |
| 14 | International Journal of Robotics Automation | 40 | 0.796 | Q4 |
| 15 | Advanced Robotics | 34 | 1.699 | Q4 |
| 16 | IEEE Transactions on Vehicular Technology | 34 | 5.978 | Q1 |
| 17 | Neurocomputing | 32 | 5.719 | Q1 |
| 18 | Applied Soft Computing | 29 | 6.725 | Q1 |
| 19 | International Journal of Control Automation and Systems | 26 | 3.314 | Q2 |
| 20 | Intelligent Service Robotics | 25 | 2.246 | Q3 |
Table 8
Conferences"
| Rank | Conference | Document |
| 1 | IEEE International Conference on Robotics and Automation | 547 |
| 2 | IEEE International Conference on Intelligent Robots and Systems | 319 |
| 3 | Lecture Notes in Computer Science | 317 |
| 4 | Lecture Notes in Artificial Intelligence | 274 |
| 5 | Proceedings of SPIE | 147 |
| 6 | IEEE International Conference on Systems, Man and Cybernetics | 137 |
| 7 | Proceedings of the American Control Conference | 126 |
| 8 | Springer Tracts in Advanced Robotics | 115 |
| 9 | Chinese Control Conference | 112 |
| 10 | IEEE Conference on Decision and Control | 109 |
Table 9
Behavior distribution with 18 keywords"
| Behavior | Total | China | USA | |||||
| Document | Proportion/% | Document | Proportion/% | Document | Proportion/% | |||
| Formation | 593 | 27.45 | 248 | 30.88 | 96 | 21.57 | ||
| Consensus | 387 | 17.92 | 215 | 26.77 | 70 | 15.73 | ||
| Coverage | 303 | 14.03 | 92 | 11.46 | 85 | 19.10 | ||
| Exploration | 272 | 12.59 | 40 | 4.98 | 62 | 13.93 | ||
| Synchronization | 141 | 6.53 | 70 | 8.72 | 27 | 6.07 | ||
| Searching | 95 | 4.40 | 47 | 5.85 | 14 | 3.15 | ||
| Transport | 87 | 4.03 | 17 | 2.12 | 23 | 5.17 | ||
| Aggregation | 70 | 3.24 | 16 | 1.99 | 6 | 1.35 | ||
| Self-organization | 70 | 3.24 | 12 | 1.49 | 16 | 3.60 | ||
| Rendezvous | 40 | 1.85 | 13 | 1.62 | 10 | 2.25 | ||
| Pattern formation | 28 | 1.30 | 8 | 1.00 | 8 | 1.80 | ||
| Self-assembly | 28 | 1.30 | 15 | 1.87 | 10 | 2.25 | ||
| Patrol | 25 | 1.16 | 6 | 0.75 | 11 | 2.47 | ||
| Morphogenesis | 16 | 0.74 | 2 | 0.25 | 7 | 1.57 | ||
| Forage | 4 | 0.19 | 2 | 0.25 | 0 | 0.00 | ||
| Chain formation | 1 | 0.05 | 0 | 0.00 | 0 | 0.00 | ||
| Connected movement | 0 | 0.00 | 0 | 0.00 | 0 | 0.00 | ||
| Self-organized construction | 0 | 0.00 | 0 | 0.00 | 0 | 0.00 | ||
| Total | 2160 | 100.00 | 803 | 100.00 | 445 | 100.00 | ||
Table 10
Function distribution with 15 keywords"
| Function | Document | Proportion/% | China | USA | |||
| Document | Proportion/% | Document | Proportion/% | ||||
| Control | 1437 | 28.01 | 494 | 32.33 | 331 | 26.95 | |
| Communication | 914 | 17.81 | 307 | 20.09 | 212 | 17.26 | |
| Planning | 651 | 12.69 | 151 | 9.88 | 195 | 15.88 | |
| Tracking | 499 | 9.73 | 224 | 14.66 | 81 | 6.60 | |
| Localization | 384 | 7.48 | 94 | 6.15 | 94 | 7.65 | |
| Navigation | 339 | 6.61 | 47 | 3.08 | 75 | 6.11 | |
| Task allocation | 244 | 4.76 | 68 | 4.45 | 66 | 5.37 | |
| Mapping | 206 | 4.01 | 34 | 2.23 | 64 | 5.21 | |
| Surveillance | 158 | 3.08 | 32 | 2.09 | 43 | 3.50 | |
| Monitoring | 155 | 3.02 | 29 | 1.90 | 36 | 2.93 | |
| Security | 87 | 1.70 | 35 | 2.29 | 15 | 1.22 | |
| Fault detection | 23 | 0.45 | 6 | 0.39 | 3 | 0.24 | |
| Target detection | 16 | 0.31 | 4 | 0.26 | 8 | 0.65 | |
| Diagnosis | 15 | 0.29 | 2 | 0.13 | 4 | 0.33 | |
| Risk assessment | 3 | 0.06 | 1 | 0.07 | 1 | 0.08 | |
| Total | 5131 | 100.00 | 1528 | 100.00 | 1228 | 100.00 | |
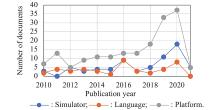
Fig 10
Number of documents related to the simulator, language, and platform"
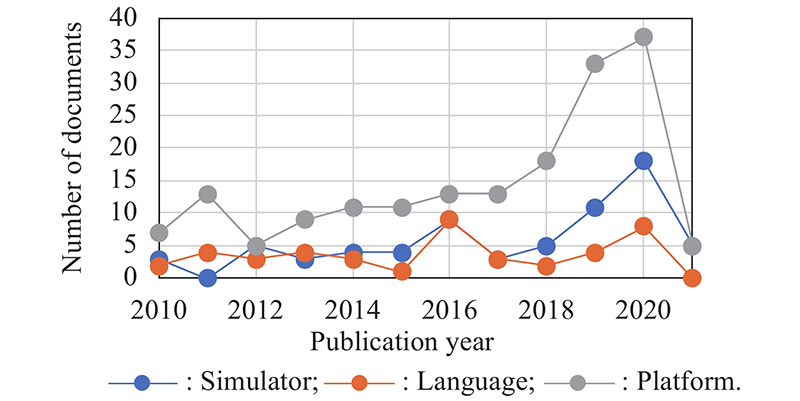
Fig 11
Region distribution of documents related to the simulator, language, and platform"
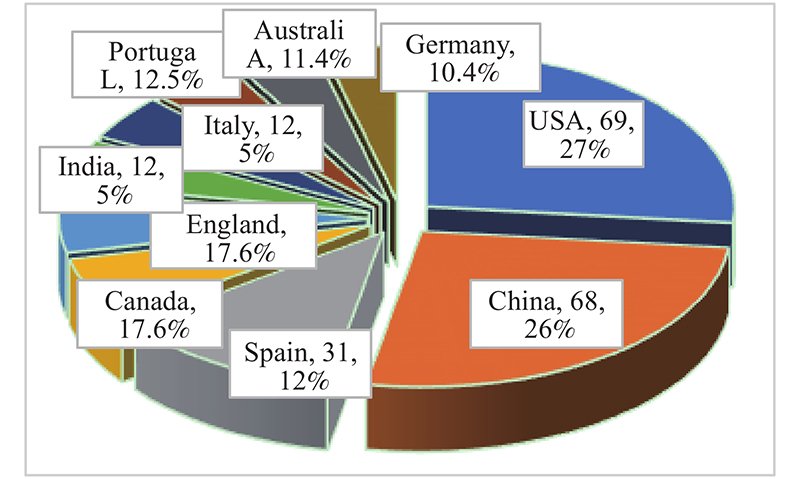

Fig 12
Keywords co-occurrence network map with a timeline view"
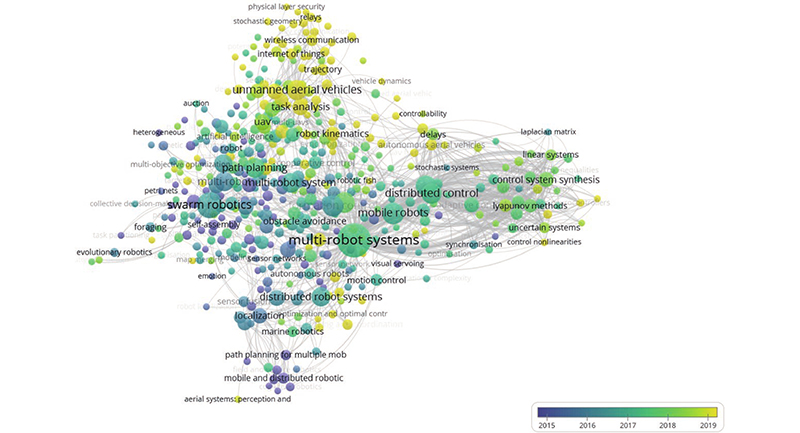
Table 11
TOP 30 keywords with strongest citation bursts"
| Keyword | Strength | Begin | End |
| Self-organization | 7.61 | 2010 | 2014 |
| Self-assembly | 5.43 | 2010 | 2012 |
| Mobile and distributed robotics slam | 5.03 | 2010 | 2015 |
| Multi-robot | 4.83 | 2010 | 2012 |
| Cooperative robot | 3.81 | 2010 | 2012 |
| Field and service robotics | 3.46 | 2010 | 2012 |
| Robotics | 3.37 | 2010 | 2016 |
| Motion planning | 7.23 | 2011 | 2016 |
| Multiple robot | 5.32 | 2011 | 2014 |
| Modular robot | 3.97 | 2011 | 2014 |
| Mapping | 3.67 | 2011 | 2012 |
| Mobile robotics | 3.47 | 2011 | 2014 |
| Distributed robotics | 3.45 | 2011 | 2012 |
| Networked robot | 6.06 | 2012 | 2015 |
| Multi-robot cooperation | 4.88 | 2012 | 2015 |
| Task allocation | 4.35 | 2012 | 2013 |
| SLAM | 4.03 | 2012 | 2013 |
| Simulation | 3.95 | 2012 | 2013 |
| Communication | 3.83 | 2013 | 2016 |
| Multi-agent | 3.75 | 2013 | 2015 |
| Swarm robotics | 6.34 | 2014 | 2016 |
| Aerial robotics | 3.45 | 2014 | 2018 |
| Formation control | 5.15 | 2015 | 2016 |
| Quadrotor | 4.06 | 2015 | 2017 |
| Multiagent system | 4.63 | 2017 | 2018 |
| UAV swarm | 4.18 | 2018 | 2021 |
| UAV | 7.46 | 2019 | 2021 |
| Routing | 4.1 | 2019 | 2021 |
| Topology | 3.85 | 2019 | 2021 |
| Sensor | 3.59 | 2019 | 2021 |

Fig 13
Cluster visualization mapping of co-citation network about the swarm"
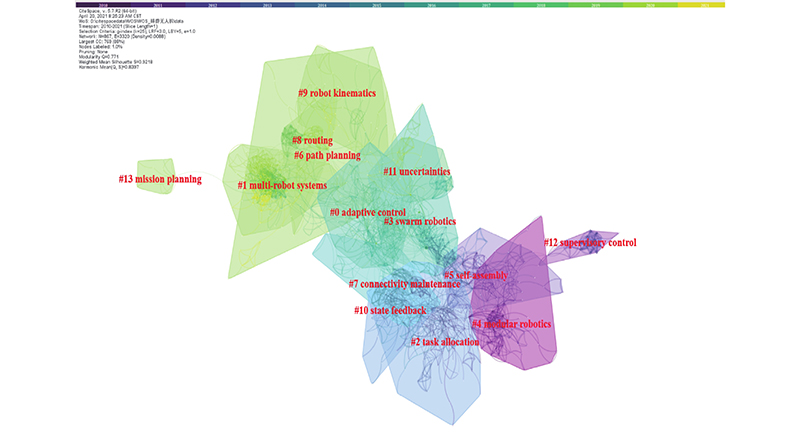
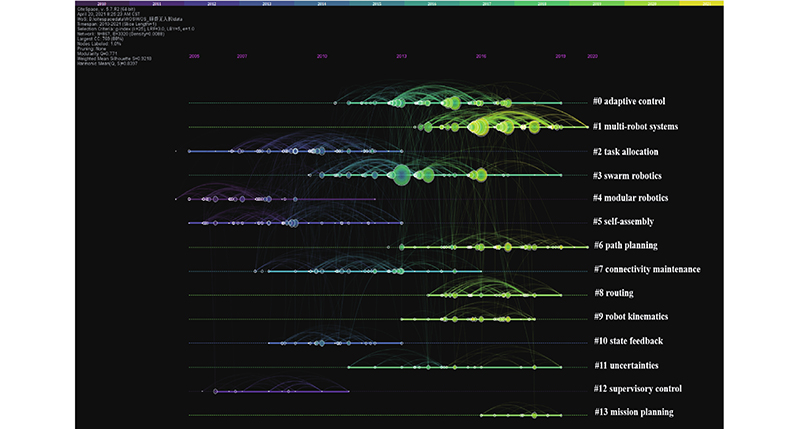
Table 12
TOP 30 keywords with strongest citation bursts"
| Cluster ID | Size | Silhouette | Average/year | Cluster ID | Size | Silhouette | Average/year | |
| #0(C0) | 112 | 0.829 | 2014 | #7(C7) | 47 | 0.92 | 2011 | |
| #1(C1) | 110 | 0.926 | 2017 | #8(C8) | 33 | 0.992 | 2016 | |
| #2(C2) | 106 | 0.909 | 2009 | #9(C9) | 30 | 0.986 | 2016 | |
| #3(C3) | 74 | 0.914 | 2013 | #10(C10) | 26 | 0.97 | 2010 | |
| #4(C4) | 60 | 0.979 | 2006 | #11(C11) | 20 | 0.972 | 2014 | |
| #5(C5) | 60 | 0.882 | 2008 | #12(C12) | 17 | 0.982 | 2008 | |
| #6(C6) | 50 | 0.953 | 2016 | #13(C13) | 11 | 1 | 2017 |

Fig 14
Timeline visualization mapping of co-citation network about the swarm"
| 1 | DONG Y, GAO M, ZHANG Y, et al Research progress and development trends of U.S. army swarm drones. Aerodynamic Missile Journal, 2020, 9, 37- 42. |
| 2 | ARQUILLA J, RONFELDT D. Swarming and the future of conflict. Santa Monica: RAND National Security Research Institute, 2000. |
| 3 | YUAN C, ZHENG Y Overview of the research progress of foreign advanced military aviation technology in 2018. Aerodynamic Missile Journal, 2019, 4, 22- 28. |
| 4 | US Air Force. Air Force future operating concept: a view of the Air Force in 2035. https://www.af.mil/News/Paper-Display/Paper/617301/af-releases-future-operating-concept. |
| 5 | US Air Force. Small unmanned aircraft systems (SUAS) flight plan: 2016-2036. https://dronebusiness.center/usafsuas-flight-plan-2016-2036-10529. |
| 6 | US Air Force. Science and technology strategy: strengthening USAF science and technology for 2030 and beyond. https://www.af.mil/Portals/1/documents/2019%20SAF%20story%20attachments/Air%20Force%20Science%20and%20Technology%20Strategy.pdf?ver=2019-04-17-13-131216-723. |
| 7 | MCCULLOUGH A. The looming swarm. Air Force Magzine. http://www.airforcemag.com/article/the-looming-swarm. |
| 8 | OLLERO A, LACROIX S, MERINO L, et al Multiple eyes in the skies, architecture and perception issues in the COMETS unmanned air vehicles project. IEEE Robotics & Automation Magazine, 2005, 12 (2): 46- 57. |
| 9 | BONABEAU E, DORIGO M, THERAULAZ G. Swarm intelligence: from natural to artificial systems. New York: Oxford University Press, 1999. |
| 10 | REYNOLDS C W Flocks, herds and schools: a distributed behavioral model. Proc. of the 14th Annual Conference on Computer Graphics and Interactive Techniques, 1987, 25- 34. |
| 11 |
VICSEK T, CZIROK A, BEN J E, et al Novel type of phase transition in a system of self-driven particles. Physical Review Letters, 1995, 75 (6): 1226- 1229.
doi: 10.1103/PhysRevLett.75.1226 |
| 12 |
STEPHEN W Statistical mechanics of cellular automata. Reviews of Modern Physics, 1983, 55 (3): 601- 644.
doi: 10.1103/RevModPhys.55.601 |
| 13 | TONER J, TU Y Flocks, herds, and schools: a quantitative theory of flocking. Physical Review E, 1999, 58, 4828- 4858. |
| 14 |
BRAMBILLA M, FERRANTE E, BIRATTARI M, et al Swarm robotics: a review from the swarm engineering perspective. Swarm Intelligence, 2013, 7 (1): 1- 41.
doi: 10.1007/s11721-012-0075-2 |
| 15 | EBERHART R C, SHI Y, KENNEDY J. Swarm intelligence. San Francisco: Morgan Kaufmann Publishers, 2001. |
| 16 | DORIGO M, SAHIN E Special issue on swarm robotics. Autonomous Robots, 2004, 17 (2/3): 111- 246. |
| 17 | SAHIN E Swarm robotics: from sources of inspiration to domains of application. Proc. of the First International Workshop on Swarm Robotics, 2005, 3342, 10- 20. |
| 18 |
SPEZZANO G Editorial: special issue “swarm robotics”. Applied Sciences, 2019, 9 (7): 1474.
doi: 10.3390/app9071474 |
| 19 | DAUTENHAHN K Embodiment and interaction in socially intelligent life-like agents. Computation for Metaphors, Analogy and Agent, 1999, 1562, 102- 142. |
| 20 | KAZADI S. Swarm engineering. Pasadena: California Institute of Technology, 2000. |
| 21 | WINFIELD A F T, HARPER C J, NEMBRINI J Towards dependable swarms and a new discipline of swarm engineering. Proc. of the International Workshop on Simulation of Adaptive Behavior, 2004, 342, 126- 142. |
| 22 | LI J. Principles and applications of mapping knowledge domains. Beijing: Higher Education Press, 2018. |
| 23 | LI J, CHEN C M. CiteSpace: text mining and visualization in scientific literature. Beijing: Capital University of Economics and Trade Press, 2017. |
| 24 |
ECK N J V, WALTMAN L Software survey: VOSviewer, a computer program for bibliometric mapping. Scientometrics, 2010, 84 (2): 523- 538.
doi: 10.1007/s11192-009-0146-3 |
| 25 | MANATHARA J G, SUJIT P B, BEARD R W Multiple UAV coalitions for a search and prosecute mission. Journal of Intelligent & Robotic Systems, 2011, 62 (1): 125- 158. |
| 26 | GEORGE J, SUJIT P B, SOUSA J B Search strategies for multiple UAV search and destroy missions. Journal of Intelligent & Robotic Systems, 2011, 61 (1–4): 355- 367. |
| 27 |
FRANCHI A, SECCHI C, SON H I, et al Bilateral teleoperation of groups of mobile robots with time-varying topology. IEEE Trans. on Robotics, 2012, 28 (5): 1019- 1033.
doi: 10.1109/TRO.2012.2196304 |
| 28 |
SCHWAGER M, JULIAN B J, ANGERMANN M Eyes in the sky: decentralized control for the deployment of robotic camera networks. Proceedings of the IEEE, 2011, 99 (9): 1541- 1561.
doi: 10.1109/JPROC.2011.2158377 |
| 29 | CHEN C M. CiteSpace: a practical guide for mapping scientific literature. Hauppauge: Nova Science Publishers, 2016. |
| 30 |
OLFATI-SABER R, FAX J A, MURRAY R M Consensus and cooperation in networked multi-agent systems. Proceedings of the IEEE, 2007, 95 (1): 215- 233.
doi: 10.1109/JPROC.2006.887293 |
| 31 |
OLFATI-SABER R Flocking for multi-agent dynamic systems: algorithms and theory. IEEE Trans. on Automatic Control, 2006, 51 (3): 401- 420.
doi: 10.1109/TAC.2005.864190 |
| 32 |
TANNER H G, JADBABAIE A, PAPPAS G J Flocking in fixed and switching networks. IEEE Trans. on Automatic Control, 2007, 52 (5): 863- 868.
doi: 10.1109/TAC.2007.895948 |
| 33 |
KERNBACH S, THENIUS R, KERNBACH O, et al Re-embodiment of honeybee aggregation behavior in an artificial micro-robotic system. Adaptive Behavior, 2009, 17 (3): 237- 259.
doi: 10.1177/1059712309104966 |
| 34 |
BERMAN S, HALASZ A, HSIEH M A, et al Optimized stochastic policies for task allocation in swarms of robots. IEEE Trans. on Robotics, 2009, 25 (4): 927- 937.
doi: 10.1109/TRO.2009.2024997 |
| 35 |
DIAS M B, ZLOT R, KALRA N, et al Market-based multirobot coordination: a survey and analysis. Proceedings of the IEEE, 2006, 94 (7): 1257- 1270.
doi: 10.1109/JPROC.2006.876939 |
| 36 |
CHEN J, SUN D, YANG J, et al Leader-follower formation control of multiple non-holonomic mobile robots incorporating a receding-horizon scheme. The International Journal of Robotics Research, 2010, 29 (6): 727- 747.
doi: 10.1177/0278364909104290 |
| 37 |
CHOI H L, BRUNET L, HOW J P Consensus-based decentralized auctions for robust task allocation. IEEE Trans. on Robotics, 2009, 25 (4): 912- 926.
doi: 10.1109/TRO.2009.2022423 |
| 38 |
SUN D, WANG C, SHANG W, et al A synchronization approach to trajectory tracking of multiple mobile robots while maintaining time-varying formations. IEEE Trans. on Robotics, 2009, 25 (5): 1074- 1086.
doi: 10.1109/TRO.2009.2027384 |
| 39 |
GIL S, KUMAR S, KATABI D, et al Adaptive communication in multi-robot systems using directionality of signal strength. The International Journal of Robotics Research, 2015, 34 (7): 946- 968.
doi: 10.1177/0278364914567793 |
| 40 | MARTIN A, EMAMI M R Just-in-time cooperative simultaneous localization and mapping: a robust paper filter approach. International Journal of Robotics and Automation, 2014, 29 (2): 119- 132. |
| 41 |
LEE D, FRANCHI A, SON H I, et al Semi-autonomous haptic teleoperation control architecture of multiple unmanned aerial vehicles. IEEE/ASME Trans. on Mechatronics, 2013, 18 (4): 1334- 1345.
doi: 10.1109/TMECH.2013.2263963 |
| 42 |
SABATTINI L, CHOPRA N, SECCHI C Decentralized connectivity maintenance for cooperative control of mobile robotic systems. The International Journal of Robotics Research, 2013, 32 (12): 1411- 1423.
doi: 10.1177/0278364913499085 |
| 43 |
GALCERAN E, CARRERAS M A survey on coverage path planning for robotics. Robotics and Autonomous Systems, 2013, 61 (12): 1258- 1276.
doi: 10.1016/j.robot.2013.09.004 |
| 44 | VAN H H, GUEZ A, SILVER D. Deep reinforcement learning with double q-learning. Proc. of the AAAI Conference on Artificial Intelligence, 2016, 30(1): 2094–2100. |
| 45 |
RUBENSTEIN M, CORNEJO A, NAGPAL R Programmable self-assembly in a thousand-robot swarm. Science, 2014, 345 (6198): 795- 799.
doi: 10.1126/science.1254295 |
| 46 | DORIGO M, FLOREANO D, GAMBARDELLA L M, et al Swarmanoid: a novel concept for the study of heterogeneous robotic swarms. IEEE Robotics & Automation Magazine, 2013, 20 (4): 60- 71. |
| 47 |
OH K K, PARK M C, AHN H S A survey of multi-agent formation control. Automatica, 2015, 53, 424- 440.
doi: 10.1016/j.automatica.2014.10.022 |
| 48 | KHAMIS A, HUSSEIN A, ELMOGY A Multi-robot task allocation: a review of the state-of-the-art. Cooperative Robots and Sensor Networks, 2015, 604, 31- 51. |
| 49 | CAO X H, CHENG P, CHEN J M, et al An online optimization approach for control and communication codesign in networked cyber-physical systems. IEEE Trans. on Industrial Informatics, 2012, 9 (1): 439- 450. |
| 50 |
ERDELJ M, NATALIZIO E, CHOWDHURY K R, et al Help from the sky: leveraging UAVs for disaster management. IEEE Pervasive Computing, 2017, 16 (1): 24- 32.
doi: 10.1109/MPRV.2017.11 |
| 51 | KOLLING A, WALKER P, CHAKRABORTY N, et al Human interaction with robot swarms: a survey. IEEE Trans. on Human-Machine Systems, 2015, 46 (1): 9- 26. |
| 52 |
BEKMEZCI I, SAHINGOZ O K, TEMEL S Flying ad-hoc networks (FANETs): a survey. Ad Hoc Networks, 2013, 11 (3): 1254- 1270.
doi: 10.1016/j.adhoc.2012.12.004 |
| 53 |
MOTLAGH N H, TALEB T, AROUK O Low-altitude unmanned aerial vehicles-based Internet of Things services: comprehensive survey and future perspectives. IEEE Internet of Things Journal, 2016, 3 (6): 899- 922.
doi: 10.1109/JIOT.2016.2612119 |
| 54 | DORLING K, HEINRICHS J, MESSIER G G, et al Vehicle routing problems for drone delivery. IEEE Trans. on Systems, Man & Cybernetics Systems, 2017, 47 (1): 70- 85. |
| 55 |
MURRAY C C, CHU A G The flying sidekick traveling salesman problem: optimization of drone-assisted parcel delivery. Transportation Research Part C: Emerging Technologies, 2015, 54, 86- 109.
doi: 10.1016/j.trc.2015.03.005 |
| 56 |
ZENG Y, ZHANG R, LIM T J Wireless communications with unmanned aerial vehicles: opportunities and challenges. IEEE Communications Magazine, 2016, 54 (5): 36- 42.
doi: 10.1109/MCOM.2016.7470933 |
| 57 | GUPTA L, JAIN R, VASZKUN G Survey of important issues in UAV communication networks. IEEE Communications Surveys & Tutorials, 2015, 18 (2): 1123- 1152. |
| 58 |
WU Q Q, ZENG Y, ZHANG R Joint trajectory and communication design for multi-UAV enabled wireless networks. IEEE Trans. on Wireless Communications, 2018, 17 (3): 2109- 2121.
doi: 10.1109/TWC.2017.2789293 |
| 59 |
DORIGO M, THERAULAZ G, TRIANNI V Reflections on the future of swarm robotics. Science Robotics, 2020, 5 (49): eabe4385.
doi: 10.1126/scirobotics.abe4385 |
| 60 |
BIRATTARI M, LIGOT A, HASSELMANN K Disentangling automatic and semi-automatic approaches to the optimization-based design of control software for robot swarms. Nature Machine Intelligence, 2020, 2 (9): 494- 499.
doi: 10.1038/s42256-020-0215-0 |
| 61 |
SANCHEZ T, CHEN D T N, DECAMP S J, et al Spontaneous motion in hierarchically assembled active matter. Nature, 2012, 491, 431- 434.
doi: 10.1038/nature11591 |
| 62 |
MORIN A, DESREUMAUX N, CAUSSIN J B, et al Distortion and destruction of colloidal flocks in disordered environments. Nature Physics, 2017, 13 (1): 63- 67.
doi: 10.1038/nphys3903 |
| 63 |
MATEO D, HORSEVAD N, HASSANI V, et al Optimal network topology for responsive collective behavior. Science Advances, 2019, 5 (4): eaau0999.
doi: 10.1126/sciadv.aau0999 |
| 64 |
BASTIEN R, ROMANCZUK P A model of collective behavior based purely on vision. Science Advances, 2020, 6 (6): eaay0792.
doi: 10.1126/sciadv.aay0792 |
| 65 |
PETERSEN K H, NAPP N, STUART-SMITH R, et al A review of collective robotic construction. Science Robotics, 2019, 4 (28): eaau8479.
doi: 10.1126/scirobotics.aau8479 |
| 66 |
GARATTONI L, BIRATTARI M Autonomous task sequencing in a robot swarm. Science Robotics, 2018, 3 (20): eaat0430.
doi: 10.1126/scirobotics.aat0430 |
| 67 | CARBONE C, GARIBALDI O, KURT Z Swarm robotics as a solution to crops inspection for precision agriculture. KnE Engineering, 2018, 3 (2): 552- 562. |
| 68 | PLEVRIS V, KARLAFTIS M G, LAGAROS N D Sustainable and resilient critical infrastructure systems. Berlin: Springer, 2010, 201- 230. |
| 69 | SIMPSON A D, RAWASHDEH O A, SMITH S W, et al Big blue: high-altitude UAV demonstrator of Mars airplane technology. Proc. of the IEEE Aerospace Conference, 2005, 4461- 4471. |
| 70 | GALLEGO G, DELBRUCK T, ORCHARD G M, et al Event-based vision: a survey. IEEE Trans. on Pattern Analysis and Machine Intelligence, 2020, 44 (1): 154- 180. |
| 71 |
SHI C Y, WANG Y Y, LIU C Y, et al SCECam: a spherical compound eye camera for fast location and recognition of objects at a large field of view. Optics Express, 2017, 25 (26): 32333- 32345.
doi: 10.1364/OE.25.032333 |
| 72 |
CHUNG S J, PARANJAPE A A, DAMES P, et al A survey on aerial swarm robotics. IEEE Trans. on Robotics, 2018, 34 (4): 837- 855.
doi: 10.1109/TRO.2018.2857475 |
| 73 |
YANG G Z, BELLINGHAM J, DUPONT P E, et al The grand challenges of science robotics. Science Robotics, 2018, 3 (14): eaar7650.
doi: 10.1126/scirobotics.aar7650 |
| 74 | COPPOLA M, MCGUIRE K N, DE WAGTER C, et al. A survey on swarming with micro air vehicles: fundamental challenges and constraints. Frontiers in Robotics and AI, 2020, 7: 18. |
| [1] | Jinqiang HU, Husheng WU, Renjun ZHAN, Rafik MENASSEL, Xuanwu ZHOU. Self-organized search-attack mission planning for UAV swarm based on wolf pack hunting behavior [J]. Journal of Systems Engineering and Electronics, 2021, 32(6): 1463-1476. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||