
Journal of Systems Engineering and Electronics ›› 2022, Vol. 33 ›› Issue (1): 197-209.doi: 10.23919/JSEE.2022.000020
• CONTROL THEORY AND APPLICATION • Previous Articles Next Articles
Wenyu CHEN*( ), Lei SHAO, Humin LEI()
), Lei SHAO, Humin LEI()
Received:2020-06-23
Online:2022-01-18
Published:2022-02-22
Contact:
Wenyu CHEN
E-mail:lorilouto_cwy@163.com;hmleinet@21cn.com
About author:Supported by:Wenyu CHEN, Lei SHAO, Humin LEI. On-line trajectory generation of midcourse cooperative guidance for multiple interceptors[J]. Journal of Systems Engineering and Electronics, 2022, 33(1): 197-209.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
Fig 1
On-line trajectory generation block diagram"
Fig 3
Change of ballistic inclination"
Fig 4
Change of flight speed"
Fig 5
Change of attack angle"
Fig 2
Trajectories in longitudinal plane"
Fig 6
Trajectories in longitudinal plane under 50 simulations"
Fig 7
Change of ballistic inclination under 50 simulations"
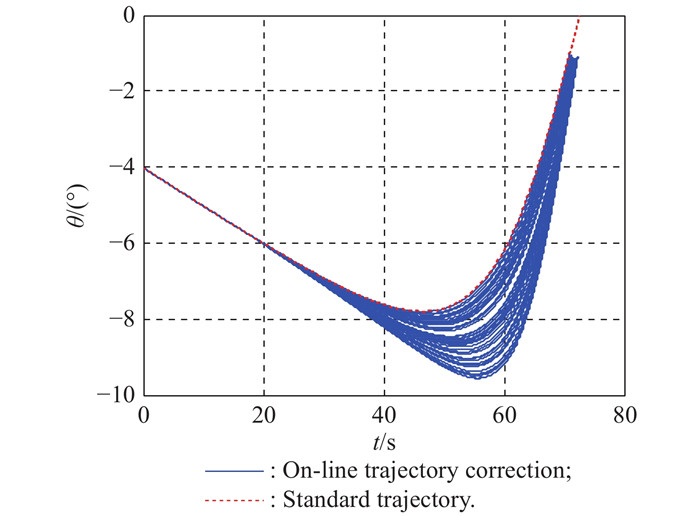
Fig 8
Change of flight speed under 50 simulations"
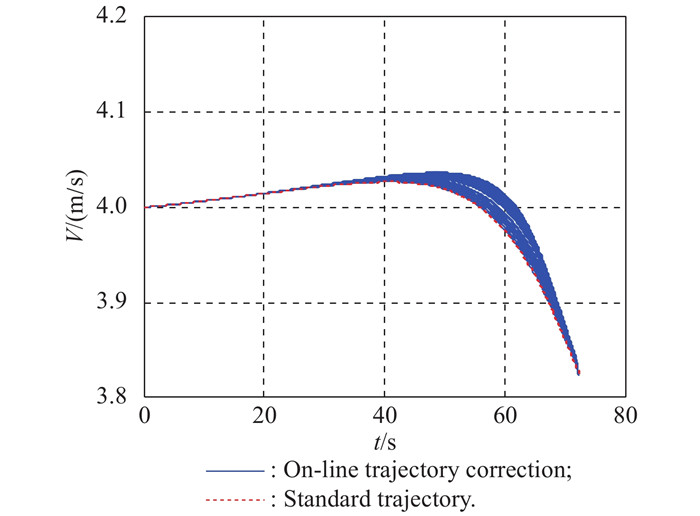
Fig 9
Change of attack angle under 50 simulations"
Fig 10
Terminal error of on-line trajectories generation under 50 simulations"
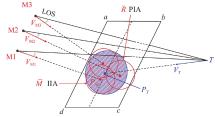
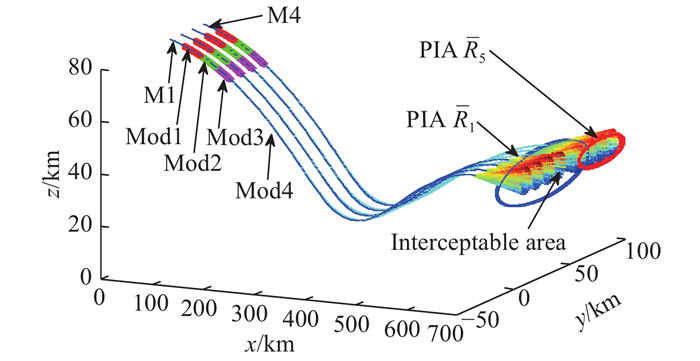
Fig 11
PIA of target and IIA of multiple interceptors"
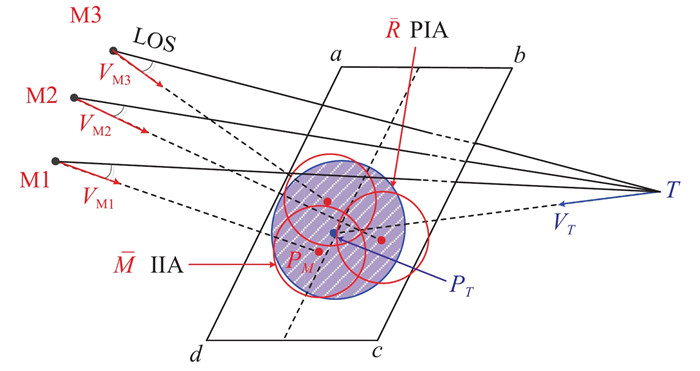
Table 1
Initial condition setting of medium guidance reference trajectory"
| | | | | |
| 3000 | 0 | 80 | ?3 | 0 |
Table 2
Terminal condition setting of medium guidance reference trajectory"
| Missile | | | | | | |
| M1 | Max | 600 | 20 | 42.07 | 0 | 0 |
| M2 | Max | 600 | 20 | 35 | 0 | 0 |
| M3 | Max | 600 | 27.07 | 35 | 0 | 0 |
| M4 | Max | 600 | 27.07 | 42.07 | 0 | 0 |
Table 3
Terminal condition setting of medium guidance correction trajectory"
| Missile | | | | | |
| M1 | 600 | 20 | 37.07 | 0 | 0 |
| M2 | 600 | 20 | 30 | 0 | 0 |
| M3 | 600 | 27.07 | 30 | 0 | 0 |
| M4 | 600 | 27.07 | 37.07 | 0 | 0 |
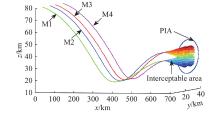
Fig 12
Generation of four interceptors’ standard trajectories"
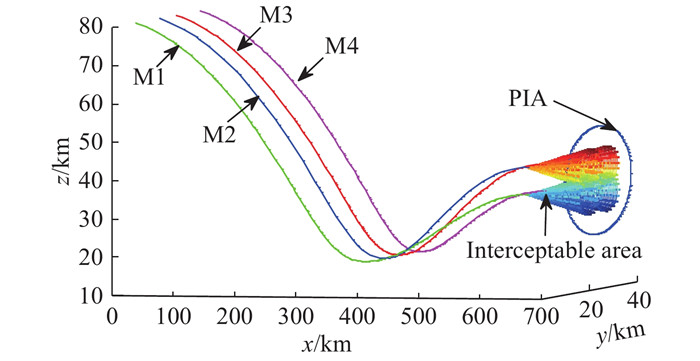
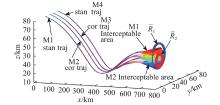
Fig 13
Generation of four interceptors’ correctional trajectories"
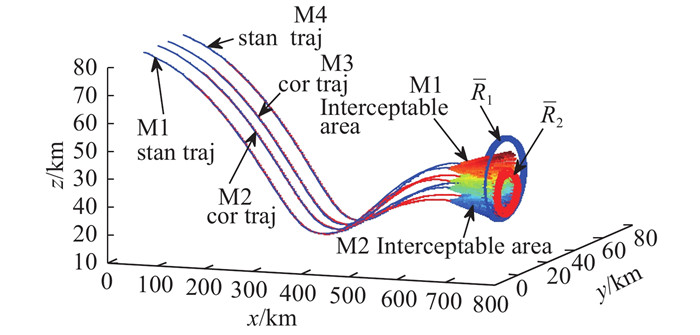
Table 4
Initial and terminal condition settings of medium guidance reference trajectory"
| | | | | |
| 3000 | 0 | 80 | ?3 | 0 |
| | | | | |
| Max | 600 | 40 | 0 | 0 |
Table 5
Terminal condition setting of medium guidance correction trajectory"
| Variable | Correction 1 | Correction 2 | Correction 3 | Correction 4 |
| | 10 | 10 | 10 | 8 |
| | 2 | 2 | 2 | 2 |
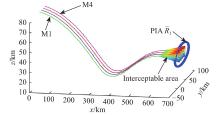
Fig 14
Generation of four interceptors’ standard trajectories"
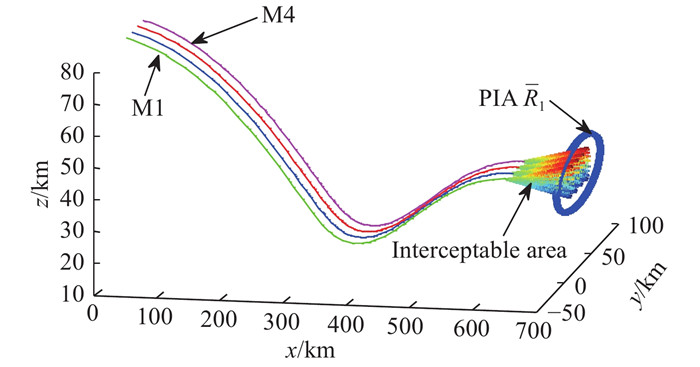
Fig 15
Generation of four interceptors’ correctional trajectories"
| 1 |
DWIVEDI P N, BHATTACHARYA A, PADHI R Suboptimal midcourse guidance of interceptors for high-speed targets with alignment angle constraint. Journal of Guidance, Control, and Dynamics, 2011, 34 (3): 860- 877.
doi: 10.2514/1.50821 |
| 2 |
HALBE O, RAJA R, PADHI R G Robust reentry guidance of a reusable launch vehicle using model predictive static programming. Journal of Guidance, Control, and Dynamics, 2014, 37 (1): 134- 148.
doi: 10.2514/1.61615 |
| 3 |
INDIG N, BEN-ASHER J Z, FARBER N Near optimal spatial midcourse guidance law with angular constraint. Journal of Guidance, Control, and Dynamics, 2014, 37 (1): 214- 223.
doi: 10.2514/1.60356 |
| 4 | INDIG N, BEN-ASHER J Z, SIGAL E Near-optimal minimum time guidance under a spatial angular constraint in atmospheric flight. Proc. of the AIAA Guidance, Navigation, and Control Conference, 2015, 5- 9. |
| 5 | PONTANI M, CECCHETTI G, TEOFILATTO P Variable-time-domain neighboring optimal guidance, Part 1: algorithm structure. Journal of Optimal Theory Application, 2015, 166, 76- 92. |
| 6 | PONTANI M, CECCHETTI G, TEOFILATTO P Variable-time-domain neighboring optimal guidance, Part 2: application to lunar decent and soft landing. Journal of Optimal Theory Application, 2015, 166, 93- 114. |
| 7 | PONTANI M, CECCHETTI G, TEOFILATTO P Variable-time-domain neighboring optimal guidance applied to space trajectories. Acta Astronautica, 2015, 115, 102- 120. |
| 8 | HUI Y, FAHROO F, ROSS M I. Real-time computation of neighboring optimal control laws. Proc. of the AIAA Guidance, Navigation, and Control Conference and Exhibit, 2002: 1−7. |
| 9 | TIAN B L, ZONG Q Optimal guidance law for reentry vehicles based on indirect Legendre pseudospectral method. Acta Astronautica, 2011, 68 (7/8): 1176- 1184. |
| 10 |
WILLIAMS P Application of pseudospectral methods for receding horizon control. Journal of Guidance, Engineering Notes, 2004, 27 (2): 310- 314.
doi: 10.2514/1.5118 |
| 11 | WU X Z. Guidance and control method of glider reentry. Beijing: Beijing University of Technology, 2015. (in Chinese) |
| 12 | YANG L, ZHOU H, CHEN W C Application of linear Gauss pseudospectral method in model predictive control. Acta Astronautica, 2014, 96, 175- 187. |
| 13 | ZHOU J, LEI H M, SHAO L, et al Generation of optimal ballistic cluster for midcourse guidance of interceptors. Journal of National University of Defense Science and Technology, 2017, 39 (5): 171- 177. |
| 14 |
ZHOU J, LEI H M, ZHAI D L, et al Optimal midcourse trajectory cluster generation and trajectory modification for hypersonic interceptions. Journal of Systems Engineering and Electronics, 2017, 28 (6): 1162- 1173.
doi: 10.21629/JSEE.2017.06.14 |
| 15 | LI N B, LEI H M, ZHOU J, et al Variable-time-domain online neighboring optimal trajectory modification for hypersonic interceptors. International Journal of Aerospace Engineering, 2017, 2017, 9456179. |
| 16 | LI N B, LEI H M, ZHOU J, et al Design of tracking guidance law based on neighborhood optimal control. Journal of Beijing University of Technology, 2018, 38 (1): 46- 51. |
| 17 | LEI H M, LI N B, ZHOU J, et al Optimal trajectory tracking guidance law of near space interceptor. Journal of National University of Defense Science and Technology, 2018, 40 (1): 24- 31. |
| 18 | LI N B, LEI H M, ZHOU J, et al Design of midcourse guidance trajectory online optimization for near space interceptor. Control and Decision, 2017, 32 (12): 2195- 2200. |
| 19 | ZHAI C, HE F H, HONG Y G Coverage-based interception algorithm of multiple interceptors against the target involving decoys. Journal of Guidance, Control, and Dynamics, 2016, 39 (7): 1646- 1652. |
| 20 | DIONNE D, MICHALSKA H, RABBATH C A Predictive guidance for pursuit-evasion engagements involving multiple decoys. Journal of Guidance, Control, and Dynamics, 2015, 30 (5): 1277- 1286. |
| 21 | SU W S, LI K B, CHEN L Coverage-based three-dimensional cooperative guidance strategy against high maneuvering target. Aerospace Science and Technology, 2019, 85, 556- 566. |
| 22 | MA L B, HE F H, YAO Y. A coverage-based guidance algorithm for the multiple-stage cooperative interception problem. Proc. of the 35th Chinese Control Conference, 2016. DOI:10.1109/ChiCC.2016.7554641. |
| 23 | WANG J W, HE F H, WANG L, et al. Cooperative guidance for multiple interceptors based on dynamic target coverage theory. Proc. of the 11th World Congress on Intelligent Control and Automation, 2014. DOI:10.1109/WCICA.2014.7053406. |
| 24 | LIU X , LIANG X G. Integrated guidance and control of multiple interceptor missiles based on improved distributed cooperative control strategy. Journal of Aerospace Technology and Management, 2019. DOI:10.5028/jatm.v11.1003. |
| 25 | WANG S J, WANG D C, YAN W Y, et al. Optimal system control. Beijing: Water Conservancy and Hydropower Press, 1985. (in Chinese) |
| 26 | LEI H M, LI J, HU X J, et al. Theory of guidance and control for missile. Beijing: National Defense Industry Press, 2018. (in Chinese) |
| 27 | BREAKWELL J V, SPEYER J L, BRYSON A E Optimization and control of nonlinear systems using the second variation. SIAM Journal on Control and Optimization, 1963, 1 (2): 193- 223. |
| 28 | BRYSON A E, HO Y C. Applied optimal control. New York: Halsted Press, 1975. |
| 29 | Department of Applied Mathematics, Tongji University. Linear algebra. Beijing: Higher Education Press, 2006. (in Chinese) |
| 30 | ZHAI D L, LEI H M, LI J, et al Trajectory prediction of hypersonic vehicle based on adaptive IMM. Acta Aeronautica et Astronautica Sinica, 2016, 37 (11): 3466- 3475. |
| [1] | Tao ZHANG, Jiong LI, Weimin LI, Huaji WANG, Humin LEI. Prescribed performance neural control to guarantee tracking quality for near space kinetic kill vehicle [J]. Journal of Systems Engineering and Electronics, 2019, 30(3): 573-586. |
| [2] | Ligang GONG, Qing WANG, Chaoyang DONG. Switching disturbance rejection attitude control of near space vehicles with variable structure [J]. Journal of Systems Engineering and Electronics, 2019, 30(1): 167-179. |
| [3] | Jing ZHAO, Bin JIANG, Fei XIE, Zhifeng GAO, Yufei XU. Adaptive sliding mode backstepping control for near space vehicles considering engine faults [J]. Journal of Systems Engineering and Electronics, 2018, 29(2): 343-351. |
| [4] | Yufei Xu, Bin Jiang, Zhifeng Gao, and Ke Zhang. Fault tolerant control for near space vehicle: a survey and some new results [J]. Journal of Systems Engineering and Electronics, 2011, 22(1): 88-94. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||