
Journal of Systems Engineering and Electronics ›› 2022, Vol. 33 ›› Issue (1): 11-21.doi: 10.23919/JSEE.2022.000002
• ELECTRONICS TECHNOLOGY • Previous Articles Next Articles
Shengming XU1( ), Shan LU2(), Yueyang HOU2(), Shengxian SHI1,*()
), Shan LU2(), Yueyang HOU2(), Shengxian SHI1,*()
Received:2020-04-14
Accepted:2021-11-26
Online:2022-01-18
Published:2022-02-22
Contact:
Shengxian SHI
E-mail:xsm0911@sjtu.edu.cn;9175393@qq.com;houyueyang_hit@163.com;kirinshi@sjtu.edu.cn
About author:Shengming XU, Shan LU, Yueyang HOU, Shengxian SHI. Accurate 3D geometry measurement for non-cooperative spacecraft with an unfocused light-field camera[J]. Journal of Systems Engineering and Electronics, 2022, 33(1): 11-21.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks

Fig 1
Light-field representation"
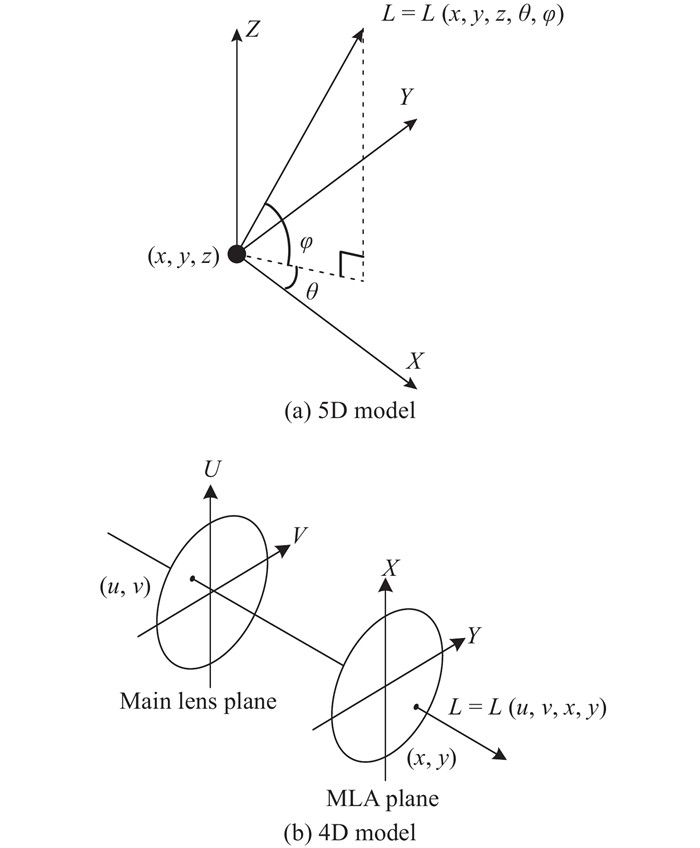

Fig 2
Schematic diagram of a light-field camera"
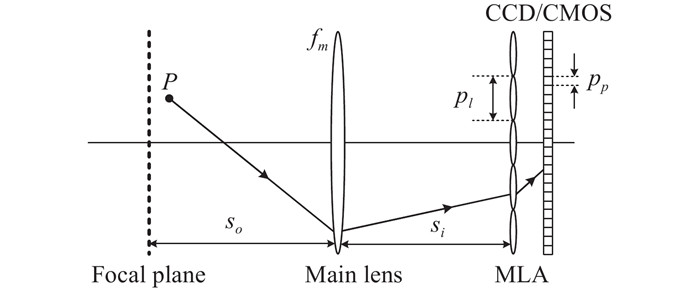
Fig 3
Flow chart of applying light-field imaging in navigation and proximity operations"
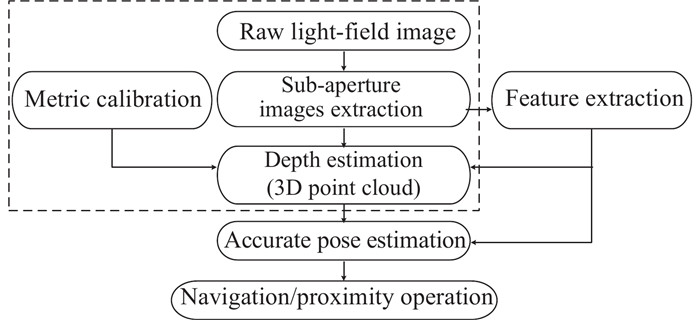
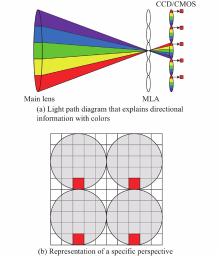
Fig 4
Representation of positional and directional information acquired by a light-field camera"
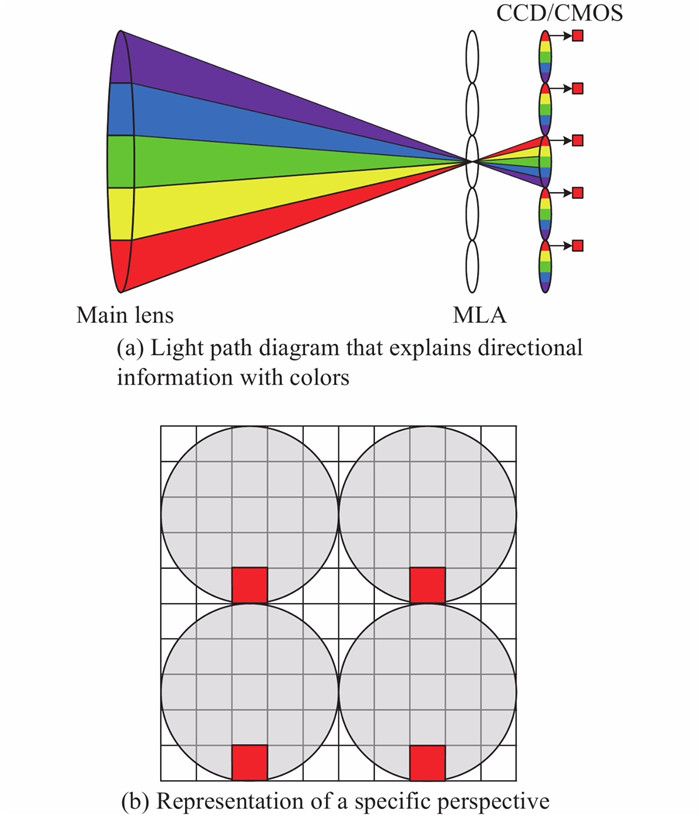
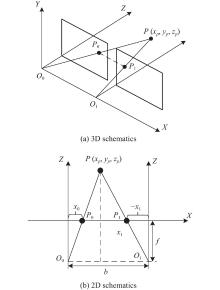
Fig 5
Schematics of parallax in a binocular system"
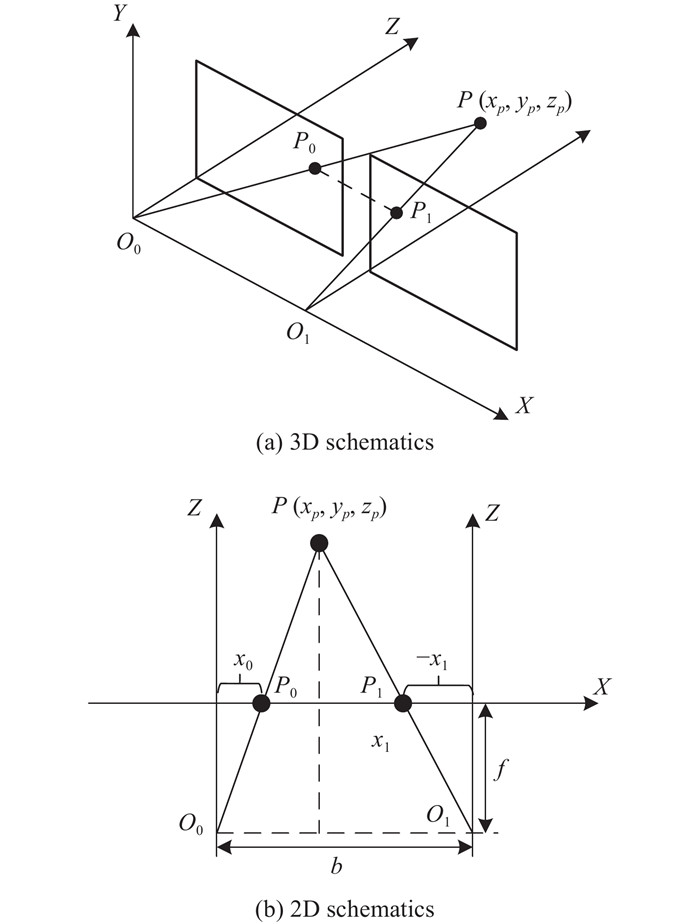

Fig 6
Sub-aperture images and an EPI extracted from them"
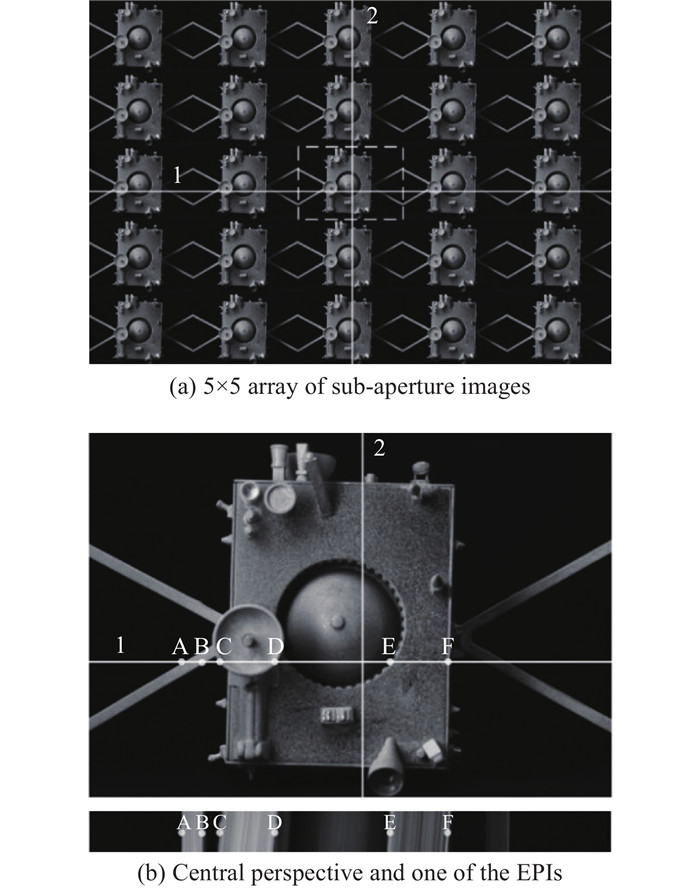

Fig 7
Diagram of the spinning parallelogram operator and the cost value as a function of index"
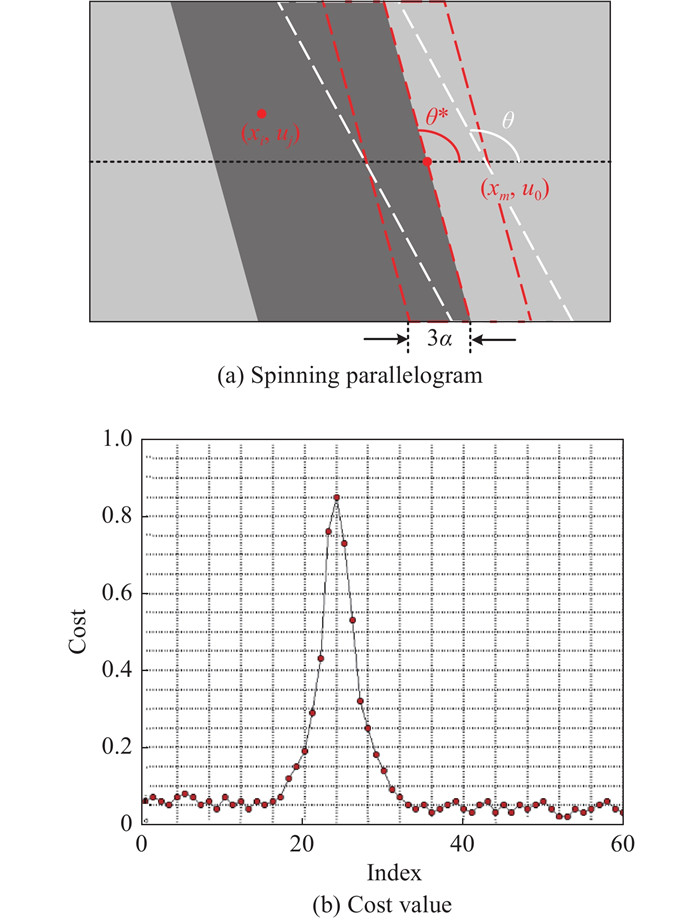

Fig 8
Validation test for camera metric calibration"
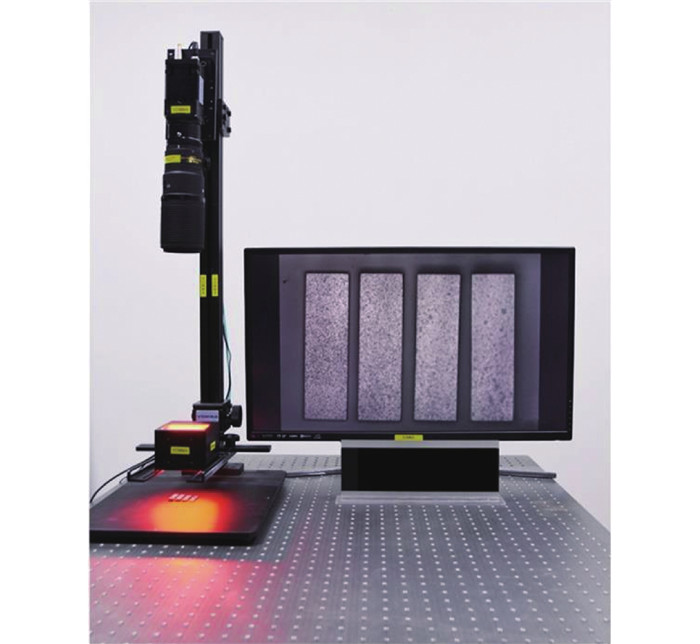

Fig 9
"
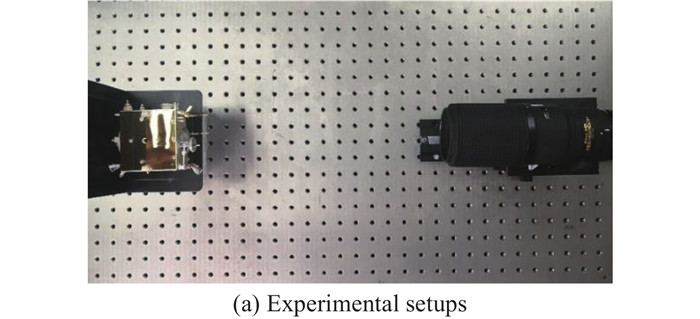

Fig 9
Test rigs and results"
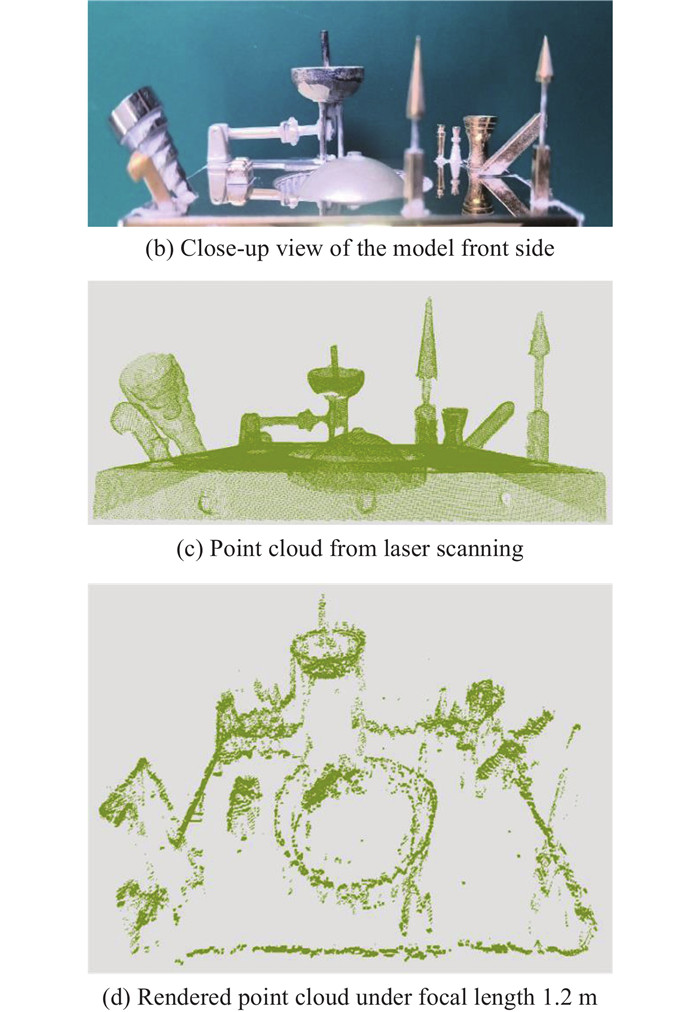
Table 1
Parameters of experimental cases"
| | FOV /mm | Repeated times | Number of points | /mm |
| 1.0 | 69×52 | 1 | 57 000 | 0.837 |
| 1.2 | 102×77 | 1 | 68 000 | 0.743 |
| 1.2 | 102×77 | 30 | 70 000 Average | 0.750 |
| 1.5 | 131×99 | 1 | 37 000 | 0.973 |

Fig 10
An example of the spacecraft model"
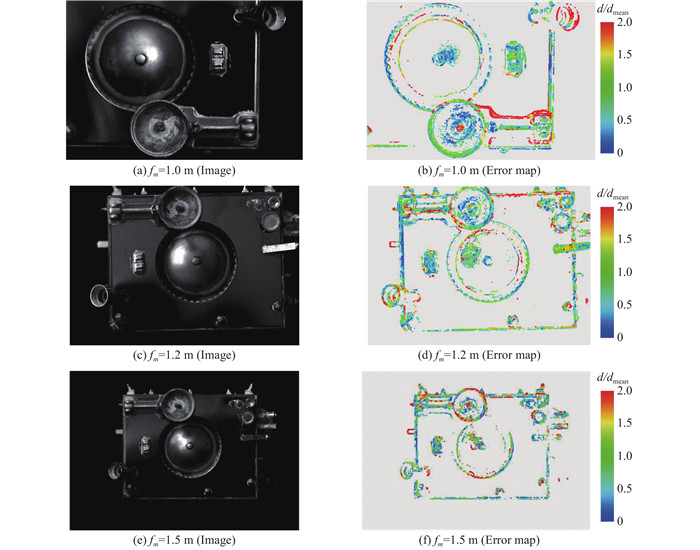
Fig 11
Central perspective images under different focal lengths"
| 1 | CelesTrak. SATCAT Boxscore. http://www.celestrak.com/satcat/boxscore.php. Accessed on 14th Feb, 2020. |
| 2 |
HOWARD R T, BRYAN T C DART AVGS flight results. Sensors and Systems for Space Applications, 2007, 6555, 65550L.
doi: 10.1117/12.720242 |
| 3 | BODIN P, NOTEBORN R, LARSSON R, et al The prisma formation flying demonstrator: overview and conclusions from the nominal mission. Advances in the Astronautical Sciences, 2012, 144, 441- 460. |
| 4 |
KAISER C, SJOlBERG F, DELCURA J, et al SMART-OLEV—an orbital life extension vehicle for servicing commercial spacecrafts in GEO. Acta Astronautica, 2008, 63, 400- 410.
doi: 10.1016/j.actaastro.2007.12.053 |
| 5 |
SHAN M H, GUO J, GILL E Review and comparison of active space debris capturing and removal methods. Progress in Aerospace Sciences, 2016, 80, 18- 32.
doi: 10.1016/j.paerosci.2015.11.001 |
| 6 |
BONNAL C, RUAULT J, DESJEAN M Active debris removal: recent progress and current trends. Acta Astronautica, 2013, 85, 51- 60.
doi: 10.1016/j.actaastro.2012.11.009 |
| 7 |
OPROMOLLA R, FASANO G, RUFINO G, et al A review of cooperative and uncooperative spacecraft pose determination techniques for close-proximity operations. Progress in Aerospace Sciences, 2017, 93, 53- 72.
doi: 10.1016/j.paerosci.2017.07.001 |
| 8 | ALDOMA A, VINCZE M, BLODOW N, et al. CAD-model recognition and 6DOF pose estimation using 3D cues. Proc. of the IEEE International Conference on Computer Vision Workshops, 2011: 585−592. |
| 9 | ALDOMA A, MARTON Z, TOMBARI F, et al Three-dimensional object recognition and 6 DOF pose estimation. IEEE Robotics & Automation Magazine, 2012, 19 (3): 80- 91. |
| 10 | KEHOE B, MATSUKAWA A, CANDIDO S, et al. Cloud-based robot grasping with the Google object recognition engine. Proc. of the IEEE International Conference on Robotics and Automation, 2013: 4263−4270. |
| 11 |
MATTHIES L, KANADE T, SZELISKI R Kalman filter-based algorithms for estimating depth from image sequences. International Journal of Computer Vision, 1989, 3, 209- 238.
doi: 10.1007/BF00133032 |
| 12 | YE M, WANG X W, YANG R G, et al. Accurate 3D pose estimation from a single depth image. Proc. of the International Conference on Computer Vision, 2011: 731−738. |
| 13 | CHRISTIAN J A, CRYAN S. A survey of LIDAR technology and its use in spacecraft relative navigation. Proc. of the AIAA Guidance, Navigation, and Control Conference, 2013: 4641. |
| 14 | DURRANT-WHYTE H, BAILEY T Simultaneous localization and mapping: part I. IEEE Robotics & Automation Magazine, 2006, 13 (2): 99- 110. |
| 15 |
SUBBARAO M, SURYA G Depth from defocus: a spatial domain approach. International Journal of Computer Vision, 1994, 13 (3): 271- 294.
doi: 10.1007/BF02028349 |
| 16 | SAXENA A, CHUNG S H, NG A Y Learning depth from single monocular images. Neural Information Processing Systems, 2005, 18, 1- 8. |
| 17 | XIAN K, SHEN C H, CAO Z G, et al. Monocular relative depth perception with web stereo data supervision. Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2018: 311−320. |
| 18 | LUKAC R. Computational photography: methods and applications. Boca Raton: CRC Press, 1991. |
| 19 | LINGENAUBER M, STROBL K H, OUMER N W, et al. Benefits of plenoptic cameras for robot vision during close range on-orbit servicing maneuvers. Proc. of the IEEE Aerospace Conference, 2017: 1−18. |
| 20 | YANG L, WANG B Q, ZHANG R H, et al Analysis on location accuracy for the binocular stereo vision system. IEEE Photonics Journal, 2017, 10 (1): 1- 16. |
| 21 | GEORGIEV T, LUMSDAINE A. Superresolution with plenoptic 2.0 cameras. Signal Recovery & Synthesis, 2009. DOI: 10.1364/SRS.2009.STuA6. |
| 22 | NG R, LEVOY M, BREDIF M, et al. Light field photography with a hand-held plenoptic camera. Stanford, US: Stanford University, 2005. |
| 23 | GEORGIEV T G, ZHENG K C, CURLESS B, et al. Spatio-angular resolution tradeoffs in integral photography. Rendering Techniques, 2016, 21: 263−272. |
| 24 | ADELSON E H, JAMES R. The plenoptic function and the elements of early vision. Massachusetts: Massachusetts Institute of Technology, 1991. |
| 25 | MCMILLAN L, BISHOP G. Plenoptic modeling: an image-based rendering system. Proc. of the 22nd annual Conference on Computer graphics and interactive techniques, 1995: 39−46. |
| 26 |
SHI S X, WANG J H, DING J F, et al Parametric study on light field volumetric particle image velocimetry. Flow Measurement and Instrumentation, 2016, 49, 70- 88.
doi: 10.1016/j.flowmeasinst.2016.05.006 |
| 27 |
BAY H, ESS A, TUYTEKAARS T, et al Speeded-up robust features (SURF). Computer Vision and Image Understanding, 2008, 110 (3): 346- 359.
doi: 10.1016/j.cviu.2007.09.014 |
| 28 |
XU W F, LIANG B, LI C, et al Autonomous rendezvous and robotic capturing of non-cooperative target in space. Robotica, 2010, 28 (5): 705- 718.
doi: 10.1017/S0263574709990397 |
| 29 | LIU J, DING H H, SHAHROUDY A, et al Feature boosting network for 3D pose estimation. IEEE Trans. on Pattern Analysis and Machine Intelligence, 2019, 42 (2): 494- 501. |
| 30 | ZHU K, XUE Y J, FU Q, et al Hyperspectral light field stereo matching. IEEE Trans. on Pattern Analysis and Machine Intelligence, 2018, 41 (5): 1131- 1143. |
| 31 | WU G C, ZHAO M D, WANG L Y, et al. Light field reconstruction using deep convolutional network on EPI. Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2017: 6319−6327. |
| 32 | LIN H T, CHEN C, KANG S B, et al. Depth recovery from light field using focal stack symmetry. Proc. of the IEEE International Conference on Computer Vision, 2015: 3451−3459. |
| 33 | JEON H G, PARK J, CHOE G M, et al Depth from a light field image with learning-based matching costs. IEEE Trans. on Pattern Analysis and Machine Intelligence, 2018, 41 (2): 297- 310. |
| 34 | RUZON M A, TOMASI C. Color edge detection with the compass operator. Proc. of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, 1999, 2: 160−166. |
| 35 |
ZHANG S, SHENG H, LI C, et al Robust depth estimation for light field via spinning parallelogram operator. Computer Vision and Image Understanding, 2016, 145, 148- 159.
doi: 10.1016/j.cviu.2015.12.007 |
| 36 |
WERMAN M, PELEG S, ROSENFELD A A distance metric for multidimensional histograms. Computer Vision, Graphics, and Image Processing, 1985, 32 (3): 328- 336.
doi: 10.1016/0734-189X(85)90055-6 |
| 37 |
SHI S X, DING J F, NEW T H, et al Volumetric calibration enhancements for single-camera light-field PIV. Experiments in Fluids, 2019, 60 (1): 21.
doi: 10.1007/s00348-018-2670-5 |
| No related articles found! |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||