
Journal of Systems Engineering and Electronics ›› 2021, Vol. 32 ›› Issue (6): 1509-1526.doi: 10.23919/JSEE.2021.000127
• CONTROL THEORY AND APPLICATION • Previous Articles Next Articles
Yue LI1( ), Xianghua WEN2,*(), Wei LI2(), Lan WEI2(), Qunli XIA1()
), Xianghua WEN2,*(), Wei LI2(), Lan WEI2(), Qunli XIA1()
Received:2020-06-16
Online:2022-01-05
Published:2022-01-05
Contact:
Xianghua WEN
E-mail:liyue627167955@163.com;495460738@qq.com;lion_lee1994@126.com;389968247@qq.com;1010@bit.edu.cn
About author:Supported by:Yue LI, Xianghua WEN, Wei LI, Lan WEI, Qunli XIA. Influence of roll-pitch seeker DRR and parasitic loop on Lyapunov stability of guidance system[J]. Journal of Systems Engineering and Electronics, 2021, 32(6): 1509-1526.
Fig 1
Motion of roll-pitch seeker’s optical axis"

Fig 2
Model of roll-pitch seeker’s stabilized and tracking loops"
Fig 3
Motion of roll-pitch seeker’s optical axis affected by scale deviation"
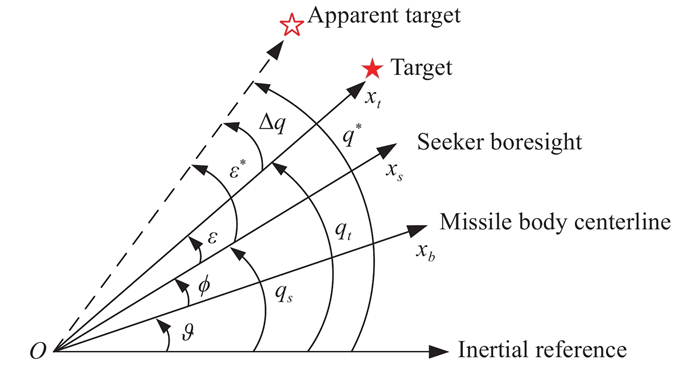
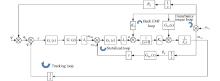
Fig 4
Model of roll-pitch seeker affected by DRR"
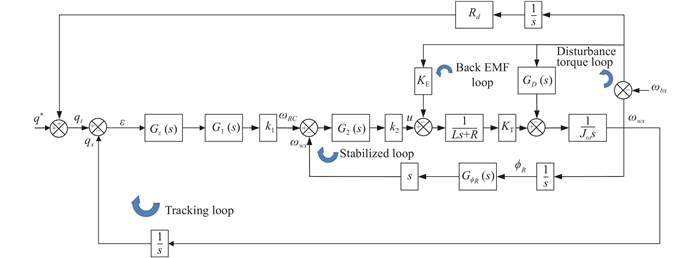
Fig 5
Simplified model of roll-pitch seeker with disturbances"
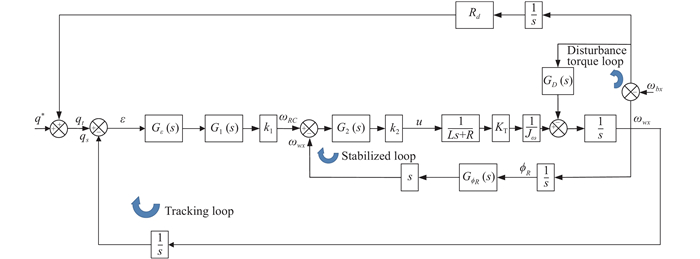
Fig 6
Simplified model of roll-pitch seeker without semi-strapdown calculation"
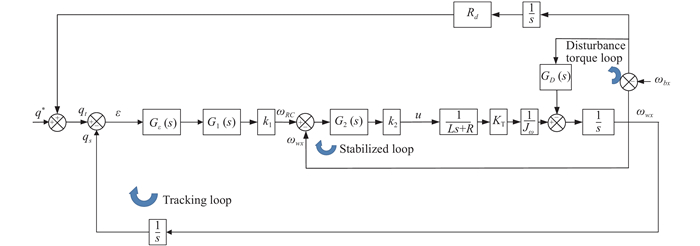

Fig 7
Simplified model of roll-pitch seeker affected by DRR"
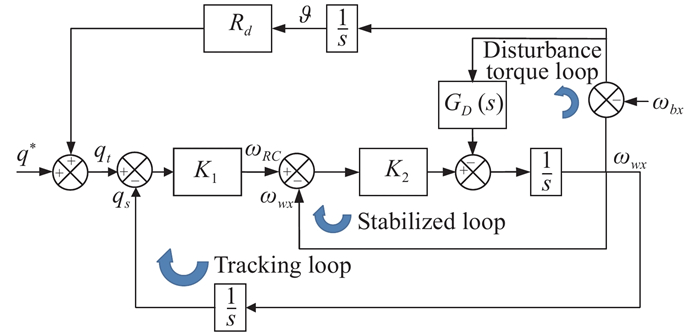
Table 1
Simplified first-order model of roll-pitch seeker’s DRRTF"
| Disturbance torque | DRRTF | Equivalent coefficient |
| Spring torque | | |
| Damping torque | | |

Fig 8
Guidance system model of roll-pitch seeker with parasitic loop"
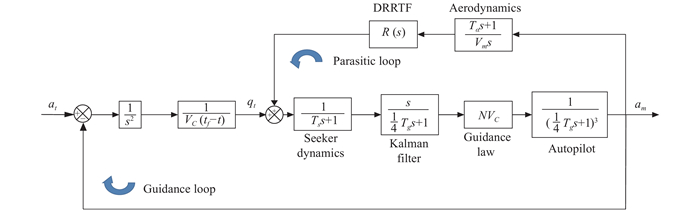

Fig 9
Dimensionless guidance system model"

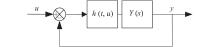
Fig 10
Feedback connection"
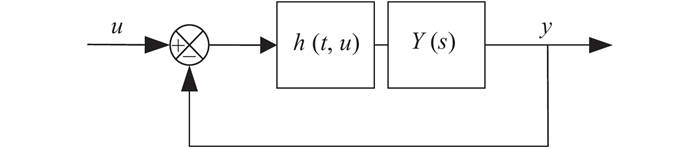
Fig 11
Equivalent feedback connection"
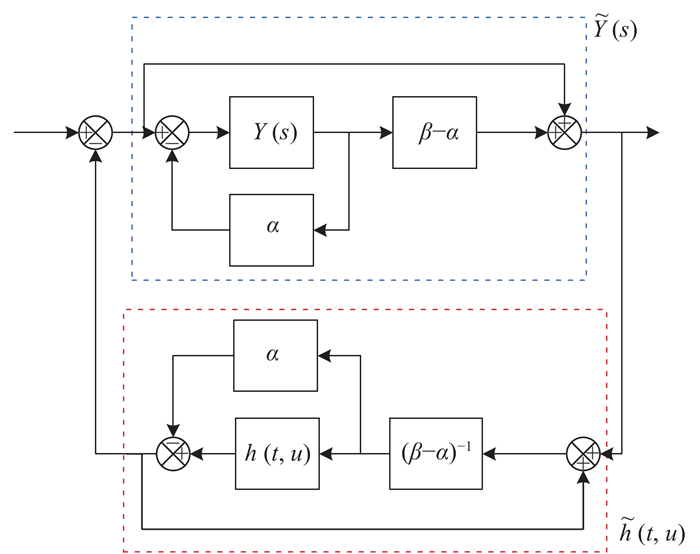
Table 2
Parameters that affect the stability of the guidance system"
| Parameter | Physical meaning | Parameter type | Values range |
| | Dimensionless equivalent time constant | Constant | 0.01 |
| | Proportional guidance coefficient | Constant | 4 |
| | The ratio of relative velocity to missile velocity | Constant | 1.5 |
| | Dimensionless angle of attack time constant | Variable | 1?3 |
| | Dimensionless terminal guidance time | Variable | 6?15 |
| | Spring torque equivalent coefficient | Variable | 0?0.01 |
| | Damping torque equivalent coefficient | Variable | 0?0.01 |
| | DRR equivalent coefficient | Variable | ?0.03?0.03 |
Fig 12
Nyquist plot of different Kr with spring torque "
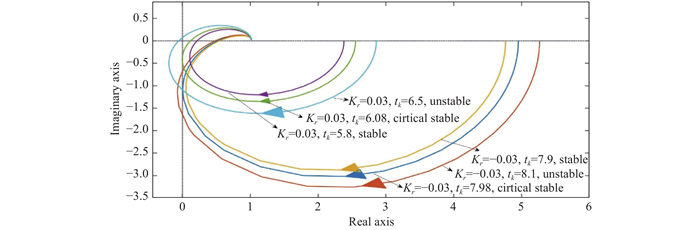
Fig 13
Nyquist plot of different Kr with damping torque "
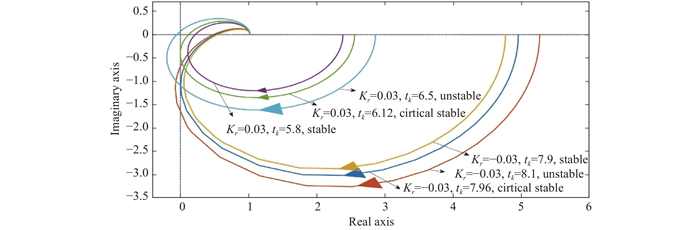
Fig 14
Nyquist plot of invariant tk with spring torque "
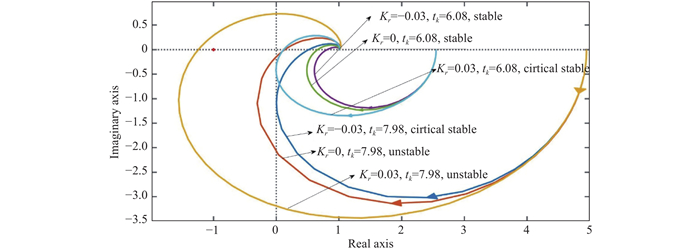
Fig 15
Nyquist plot of invariant tk with spring torque "
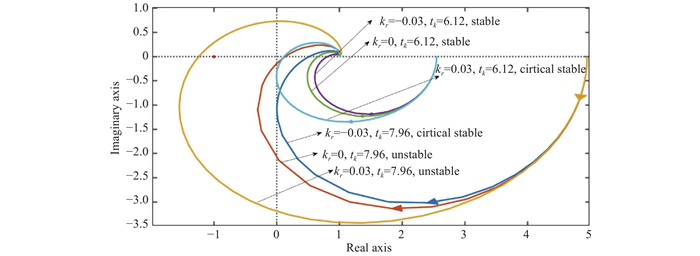
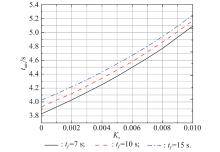
Fig 16
Relationship between the unstable interval and Ks (Kr=0.03) "
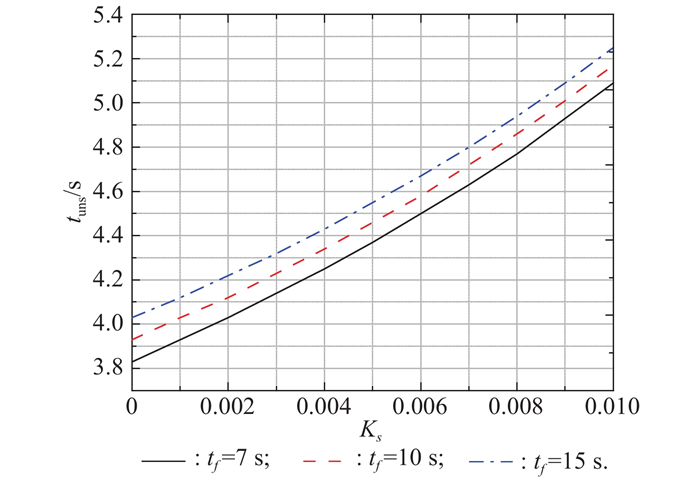
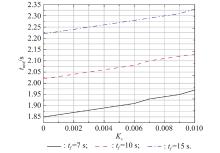
Fig 17
Relationship between the unstable interval and Ks (Kr=?0.03) "
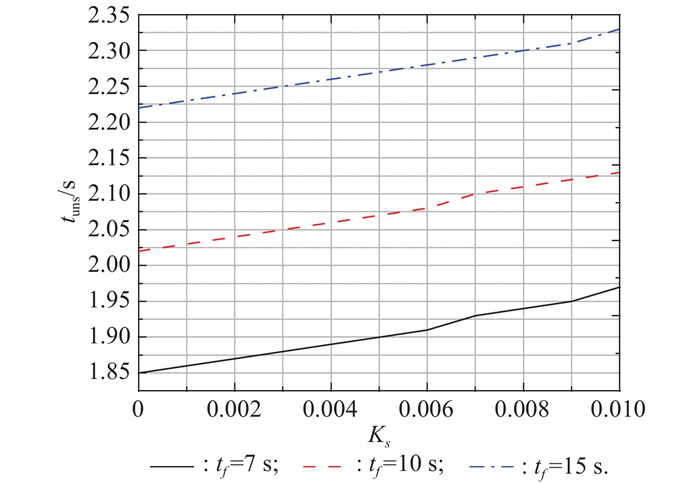
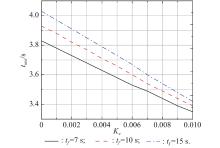
Fig 18
Relationship between the unstable interval and Kv (Kr=0.03 ) "
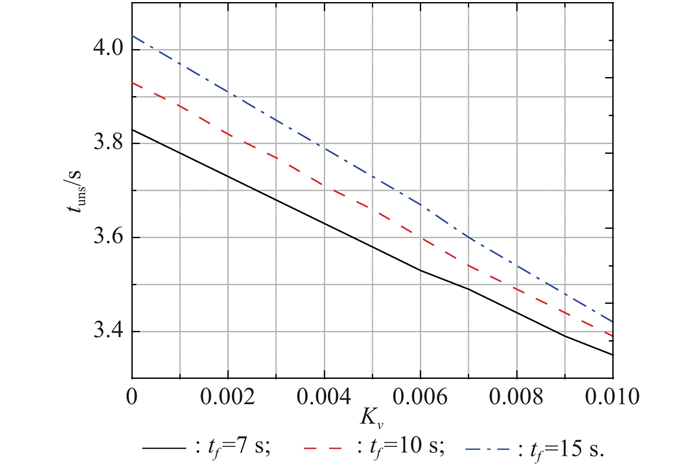
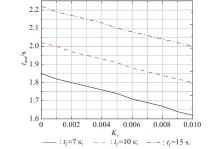
Fig 19
Relationship between the unstable interval and Kv (Kr=?0.03 ) "
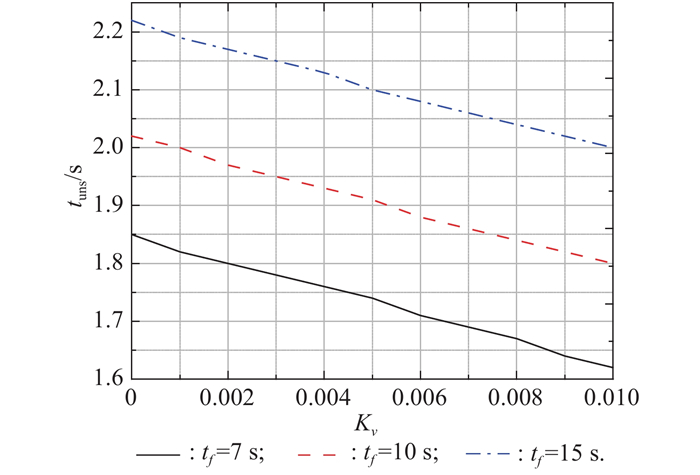
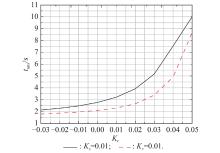
Fig 20
Relationship between unstable interval and Kr (tf=10 s) "
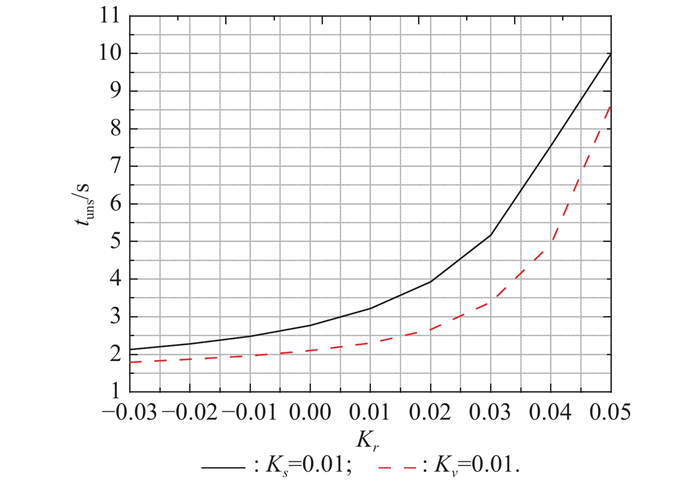
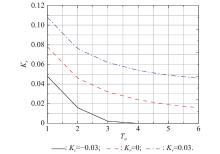
Fig 21
Relationship between Ks and Tα "
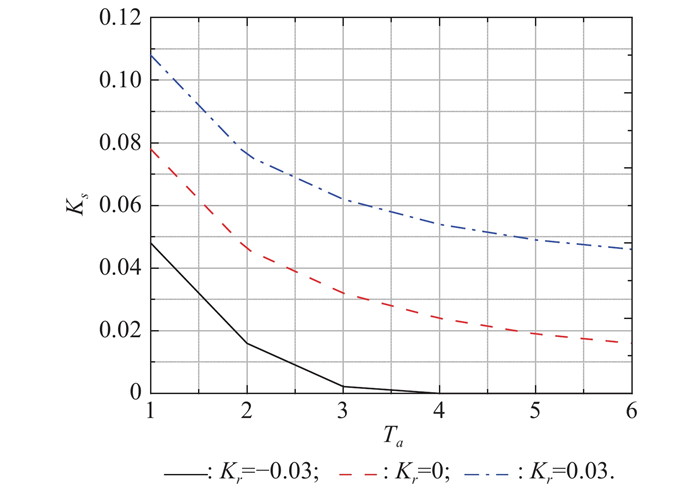
Fig 22
Relationship between Kv and Tα "
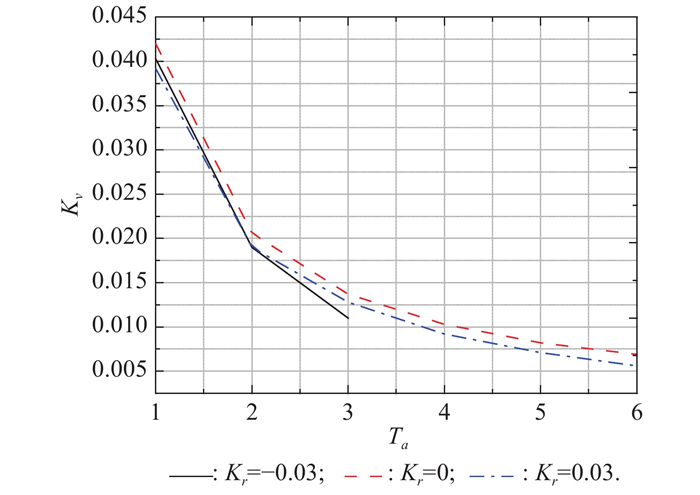

Fig 23
Guidance system with error inputs"
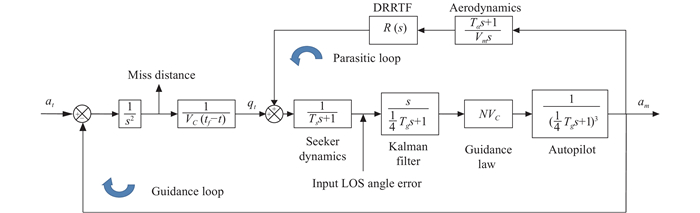
Table 3
Parameters for simulation of guidance system"
| Figure | Torque | Parameter | Description |
| Spring | | Verify Conclusion 1: the influence of | |
| Damping | | ||
| Spring | | Verify Conclusion 2: the influence of | |
| Spring | | ||
| Damping | | Verify Conclusion 2: the influence of | |
| Damping | | ||
| Spring | | Verify Conclusion 3: the influence of | |
| Spring | | ||
| Damping | | Verify Conclusion 3: the influence of | |
| Damping | |
Fig 24
Dimensionless miss distance with different Kr under spring and damping torques "
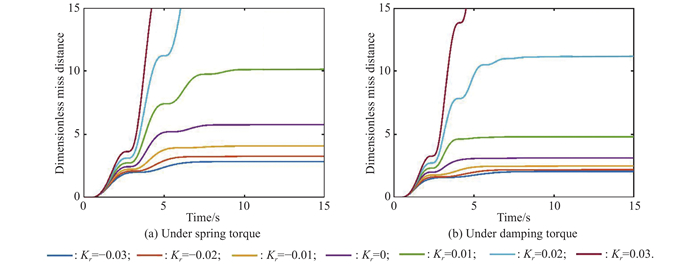
Fig 25
Dimensionless miss distance with different Ks under spring torque "
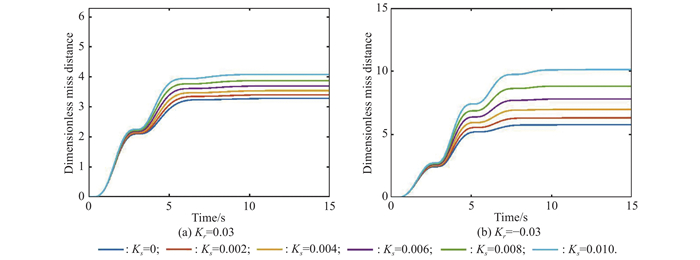
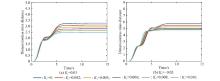
Fig 26
Dimensionless miss distance with different Kv under damping torque "
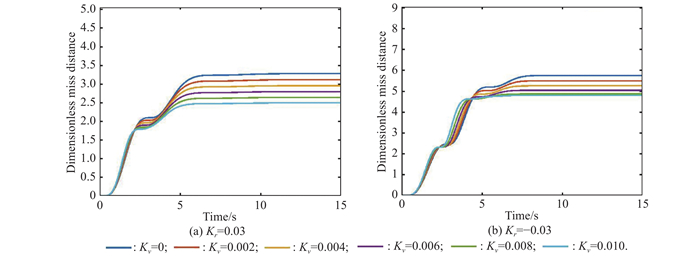
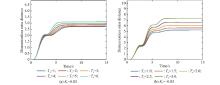
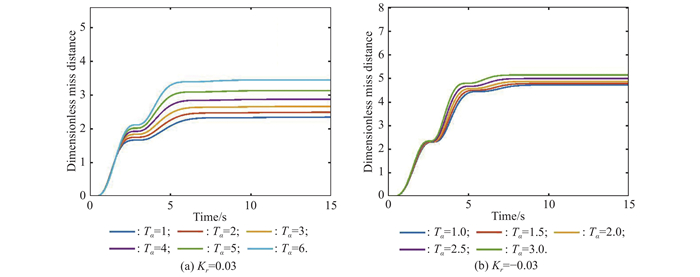
Fig 27
Dimensionless miss distance with differentTα under damping torque "
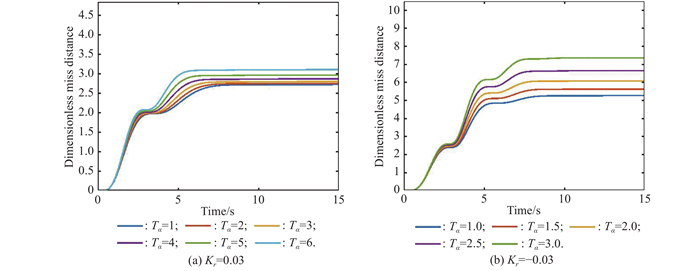
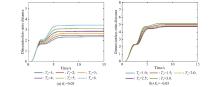
Fig 28
Dimensionless miss distance with different Tα under damping torque "
| 1 |
GUO Y, GUO J H, LIU X, et al Finite-time blended control for air-to-air missile with lateral thrusters and aerodynamic surfaces. Aerospace Science and Technology, 2020, 97, 105638.
doi: 10.1016/j.ast.2019.105638 |
| 2 |
HUI Y L, NAN Y, CHEN S D, et al Dynamic attack zone of air-to-air missile after being launched in random wind field. Chinese Journal of Aeronautics, 2015, 28 (5): 1519- 1528.
doi: 10.1016/j.cja.2015.08.013 |
| 3 |
LIU H Q, YU L, RUAN C W, et al Tracking air-to-air missile using proportional navigation model with genetic algorithm particle filter. Mathematical Problems in Engineering, 2016.
doi: 10.1155/2016/3921608 |
| 4 |
MORTAZAVI M R, ALMASGANJ F Optimal midcourse guidance of an air-to-air missile via SVM and RVM. Soft Computing, 2019, 23 (15): 6603- 6616.
doi: 10.1007/s00500-018-3308-5 |
| 5 |
LI S Y, YANG K, MA J, et al Anti-interference recognition method of aerial infrared targets based on the Bayesian network. Journal of Optics, 2021, 50 (2): 264- 277.
doi: 10.1007/s12596-021-00701-2 |
| 6 | LEONID A B, SERGEY A L, VLADLENA V O Air-to-air missile guidance For nonmaneuverable target interception at maximum distance. TsAGI Science Journal, 2019, 49 (7): 753- 770. |
| 7 | DONG Z W, GAO F, SUN L, et al. Research on fault intelligent reasoning and diagnosis of air-to-air missile weapon system of a certain armed helicopter. Proc. of the 11th International Conference on Machine Learning and Computing 2019: 147−150. |
| 8 |
LI J Q, LI J, QIN L, et al Optimal design and analysis on high overload buffer structure of passive semi-strapdown inertial navigation system. Sensors, 2020.
doi: 10.3390/s20041131 |
| 9 |
JING Z Y, ZHENG T, LI J, et al Optimized design of an anti-rotation and anti-overload structure based on missile-borne semi-strap-down inertial navigation system. IEEE Access, 2019, 7, 179646- 179657.
doi: 10.1109/ACCESS.2019.2957452 |
| 10 | LIU F, WANG H, AUBRY R. The effects of matched filter on stable performance of semistrapdown inertially stabilized platform. Mathematical Problems in Engineering, 2016. DOI: 10.1155/2016/8389350. |
| 11 |
ZHOU X Y, JIA Y, ZHAO Q, et al Experimental validation of a compound control scheme for a two-axis inertially stabilized platform with multi-sensors in an unmanned helicopter-based airborne power line inspection system. Sensors, 2016, 16 (3): 366.
doi: 10.3390/s16030366 |
| 12 | XIE C J, WANG Z Q, WANG R, et al Feed forward compensation control of dual-axis photoelectric stabilized platform. Journal of Coastal Research, 2015, 2015 (73): 771- 775. |
| 13 |
ZHANG M Y, GUAN Y L, ZHAO W W Adaptive super-twisting sliding mode control for stabilization platform of laser seeker based on extended state observer. Optik-International Journal for Light and Electron Optics, 2019, 199, 163337.
doi: 10.1016/j.ijleo.2019.163337 |
| 14 |
FU C Y, TIAN Y T, HUANG H Y, et al Finite-time trajectory tracking control for a 12-rotor unmanned aerial vehicle with input saturation. ISA Transactions, 2018, 81, 52- 62.
doi: 10.1016/j.isatra.2018.08.005 |
| 15 |
PUNEET M, VINEET K, RANA K P A fractional order fuzzy PID controller for binary distillation column control. Expert Systems with Applications, 2015, 42 (22): 8533- 8549.
doi: 10.1016/j.eswa.2015.07.008 |
| 16 |
ZHANG M Y, LIU H, ZHANG H W, et al A hybrid control strategy for the optoelectronic stabilized platform of a seeker. Optik-International Journal for Light and Electron Optics, 2019, 181, 1000- 1012.
doi: 10.1016/j.ijleo.2018.12.168 |
| 17 |
ZHENG D, LIN D F, XU X H, et al Dynamic stability of rolling missile with proportional navigation & PI autopilot considering parasitic radome loop. Aerospace Science and Technology, 2017, 67, 41- 48.
doi: 10.1016/j.ast.2017.03.036 |
| 18 |
LIN S Y, WANG W, LIN W, et al The research of loop-shaping method to mitigate the total error effect in air-to-air missiles. Optik-International Journal for Light and Electron Optics, 2019, 181, 923- 932.
doi: 10.1016/j.ijleo.2018.12.162 |
| 19 |
TIAN S, LIN D F, WANG J, et al Dynamic stability of rolling missiles with angle-of-attack feedback three-loop autopilot considering parasitic effect. Aerospace Science and Technology, 2017, 71, 592- 602.
doi: 10.1016/j.ast.2017.10.023 |
| 20 |
LI W, WEN Q Q, YANG Y Stability analysis of spinning missiles induced by seeker disturbance rejection rate parasitical loop. Aerospace Science and Technology, 2019, 90, 194- 208.
doi: 10.1016/j.ast.2019.04.013 |
| 21 |
LIU S X, DU X, XIA Q L An on-line compensation method for the disturbance rejection rate of seekers. Optik-International Journal for Light and Electron Optics, 2018, 157, 1306- 1318.
doi: 10.1016/j.ijleo.2017.12.084 |
| 22 |
DU X, LV R, TU H F, et al The research on infrared seeker with disturbance rejection effect parasitic. Optik-International Journal for Light and Electron Optics, 2018, 170, 409- 419.
doi: 10.1016/j.ijleo.2018.05.107 |
| 23 | LIU S X, LU T Y, SHANG T, et al. Dynamic modeling and coupling characteristic analysis of two-axis rate gyro seeker. International Journal of Aerospace Engineering, 2018. DOI: 10.1155/2018/8513684. |
| 24 |
CHEN K W, XIA Q L, DU X, et al Influence of seeker disturbance rejection and Radome error on the Lyapunov stability of guidance systems. Mathematical Problems in Engineering, 2018.
doi: 10.1155/2018/1890426 |
| 25 | HE F X, DAI L, CHEN Q S, et al Three-dimensional stability analysis of robotic machining process. Industrial Robot: An International Journal, 2020, 47 (1): 82- 89. |
| 26 |
TOCINO A, SENOSIAIN M MS-stability of nonnormal stochastic differential systems. Journal of Computational and Applied Mathematics, 2020, 379, 112950.
doi: 10.1016/j.cam.2020.112950 |
| 27 |
BAI R, XIA Q L, DU X The study of guidance performance of a phased array seeker with platform. Optik-International Journal for Light and Electron Optics, 2017, 132, 9- 23.
doi: 10.1016/j.ijleo.2016.12.022 |
| 28 |
LI X D, YANG X Y Lyapunov stability analysis for nonlinear systems with state-dependent state delay. Automatica, 2020, 112, 108674.
doi: 10.1016/j.automatica.2019.108674 |
| 29 |
JOSINEY A S, LUANA H T Lyapunov stability for impulsive control affine systems. Journal of Differential Equations, 2018.
doi: 10.1016/j.jde.2018.09.033 |
| 30 |
LIU X, MO B, LIU F X Line-of-sight stabilization of roll-pitch seeker using differentiator-based disturbance compensation control. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2020, 234 (7): 1326- 1339.
doi: 10.1177/0954410020902665 |
| 31 | WANG X C, MO B, LI X, et al. Predictive functional control-based zenith pass controller design for roll-pitch seeker. International Journal of Aerospace Engineering, 2020. DOI: 10.1155/2020/9709341. |
| 32 | LIU S X. Application of roll-pitch seeker to air-to-air missile guidance system. Beijing: Beijing Institute of Technology, 2019. (in Chinese) |
| 33 | BAI R. Key technology of roll-pitch seeker and its application to air-to-air missile. Beijing: Beijing Institute of Technology, 2017. (in Chinese) |
| 34 | KHALIL H K. Nonlinear systems (third edition). New Jersey: Prentice-Hall, Inc, 2002. |
| 35 | MARYAM F, SOHEIL G, HEIDAR A T, et al A novel cooperative teleoperation framework for nonlinear time-delayed single-master/multi-slave system. Robotica, 2019, 38 (3): 475- 492. |
| [1] | Yue LI, Lei HE, Qunli XIA. Line-of-sight rates extraction of roll-pitch seeker under anti-infrared decoy state [J]. Journal of Systems Engineering and Electronics, 2021, 32(1): 178-196. |
| [2] | Wenjie ZHANG, Shengnan FU, Wei LI, Qunli XIA. An impact angle constraint integral sliding mode guidance law for maneuvering targets interception [J]. Journal of Systems Engineering and Electronics, 2020, 31(1): 168-184. |
| [3] | Jianguo GUO, Yuchao LIU, Jun ZHOU. Integral terminal sliding mode control for nonlinear systems [J]. Journal of Systems Engineering and Electronics, 2018, 29(3): 571-579. |
| [4] | Xiaojian Zhang, Mingyong Liu, and Yang Li. Sliding mode control and Lyapunov based guidance law with impact time constraints#br# [J]. Journal of Systems Engineering and Electronics, 2017, 28(6): 1186-1192. |
| [5] | Xu Zhu, Jianguo Yan, and Yaohong Qu. Distributed consensus algorithm for networked Euler-Lagrange systems with self-delays and uncertainties [J]. Journal of Systems Engineering and Electronics, 2012, 23(6): 898-905. |
| [6] | Farooq M, Wang Daobo & Dar N. U. Improved hybrid position/force controller design of a flexible robot manipulator using a sliding observer [J]. Journal of Systems Engineering and Electronics, 2009, 20(1): 146-158. |
| [7] | Zhang Yan, Qu Weidong, Xi Yugeng & Cai Zili. Stabilization and trajectory tracking of autonomous airship’s planar motion [J]. Journal of Systems Engineering and Electronics, 2008, 19(5): 974-981. |
| [8] | Su Weiwei & Chen Yiming. New results on the robust stability analysis of neural networks with discrete and distributed time delays [J]. Journal of Systems Engineering and Electronics, 2008, 19(3): 592-597. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||