
Journal of Systems Engineering and Electronics ›› 2021, Vol. 32 ›› Issue (6): 1463-1476.doi: 10.23919/JSEE.2021.000124
• SYSTEMS ENGINEERING • Previous Articles Next Articles
Jinqiang HU1( ), Husheng WU1,*(), Renjun ZHAN1(), Rafik MENASSEL2(), Xuanwu ZHOU3()
), Husheng WU1,*(), Renjun ZHAN1(), Rafik MENASSEL2(), Xuanwu ZHOU3()
Received:2020-11-29
Online:2022-01-05
Published:2022-01-05
Contact:
Husheng WU
E-mail:hujinqiang002@163.com;wuhusheng0421@163.com;zhanrenjun@aliyun.com;r.menassel@univ-tebessa.dz;schwoodchow@163.com
About author:Supported by:Jinqiang HU, Husheng WU, Renjun ZHAN, Rafik MENASSEL, Xuanwu ZHOU. Self-organized search-attack mission planning for UAV swarm based on wolf pack hunting behavior[J]. Journal of Systems Engineering and Electronics, 2021, 32(6): 1463-1476.

Fig 1
Basic process of UAV swarm cooperative search-attack"
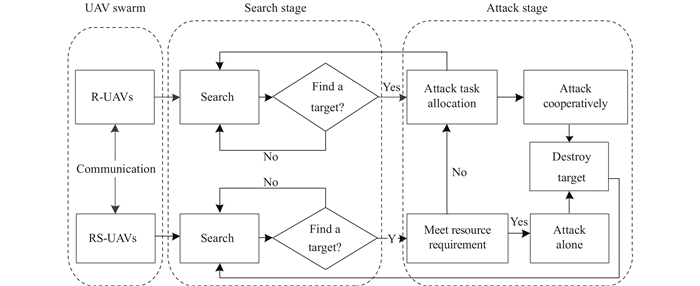
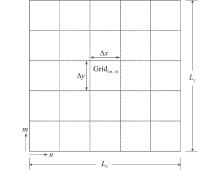
Fig 2
Grided search environment of scout wolves"
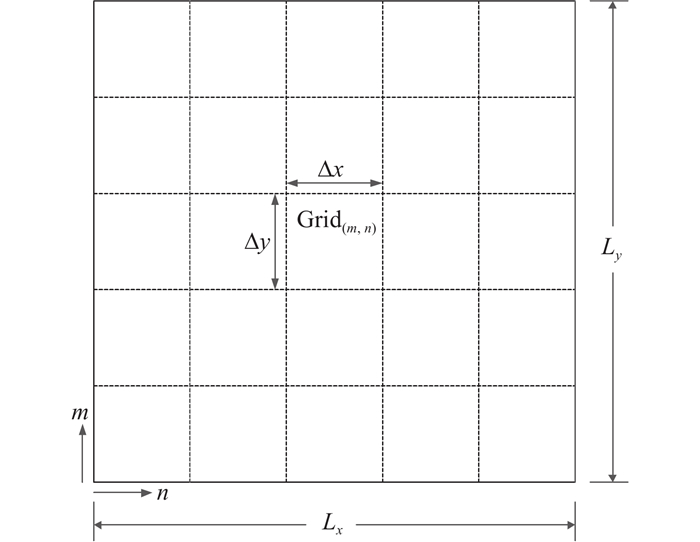

Fig 3
Relationship between the current course angle and the next optional course angle of UAVs"
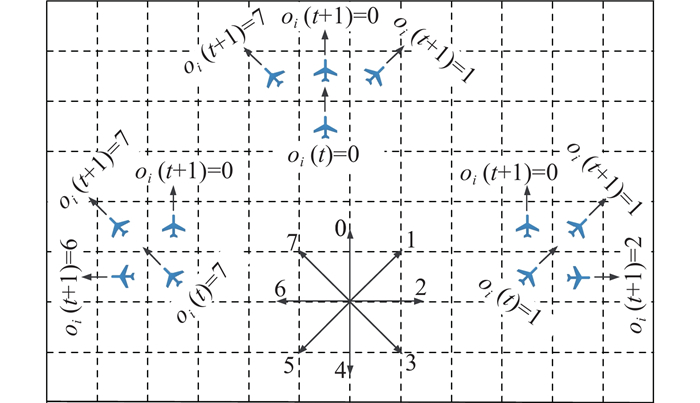
Fig 4
Search decision process of UAVs"
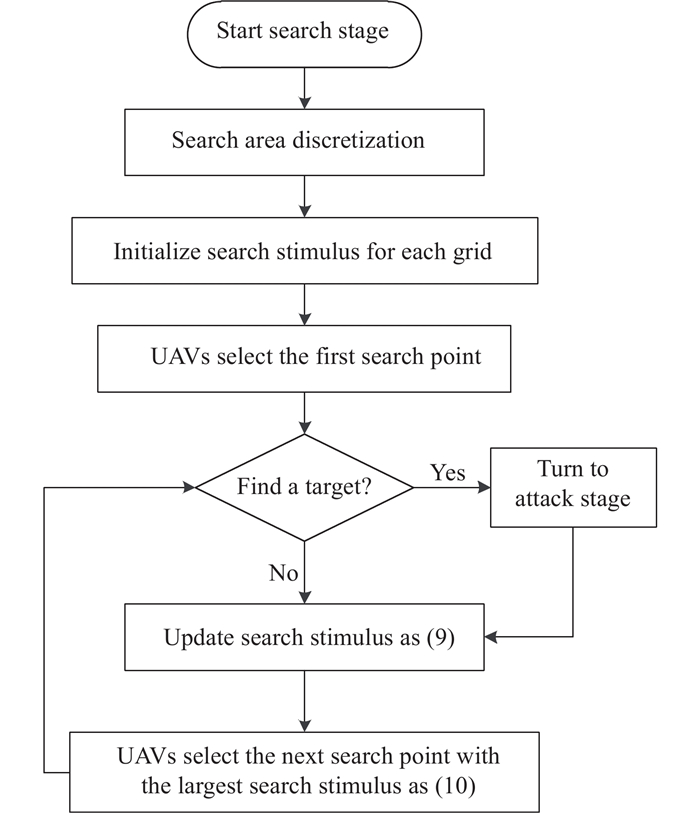

Fig 5
WPLDM"
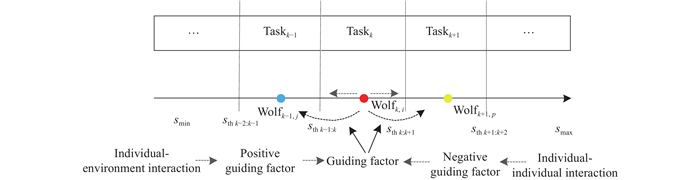
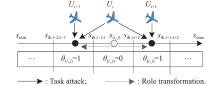
Fig 6
Role transformation and task adjustment of Ui"
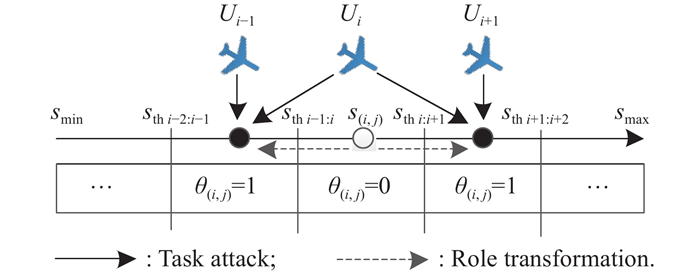
Table 1
Mapping relationship between wolf pack hunting and UAV swarm cooperative search-attack"
| Behavior characteristics | Wolf pack hunting | UAV swarm cooperative search-attack |
| Behavior actor | Wolf pack | UAV swarm |
| Prey | Target | |
| Behavior space | Hunting territory | Task environment |
| Scouting | Search target | |
| Specific behavior | Labor division | Attack task allocation |
| Besieging | Coordinated attack |
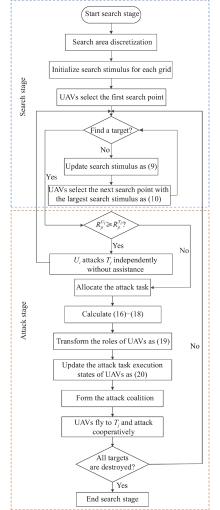
Fig 7
Basic processes of wolf hunting behavior-based mission planning algorithm for UAV swarm cooperative search-attack"
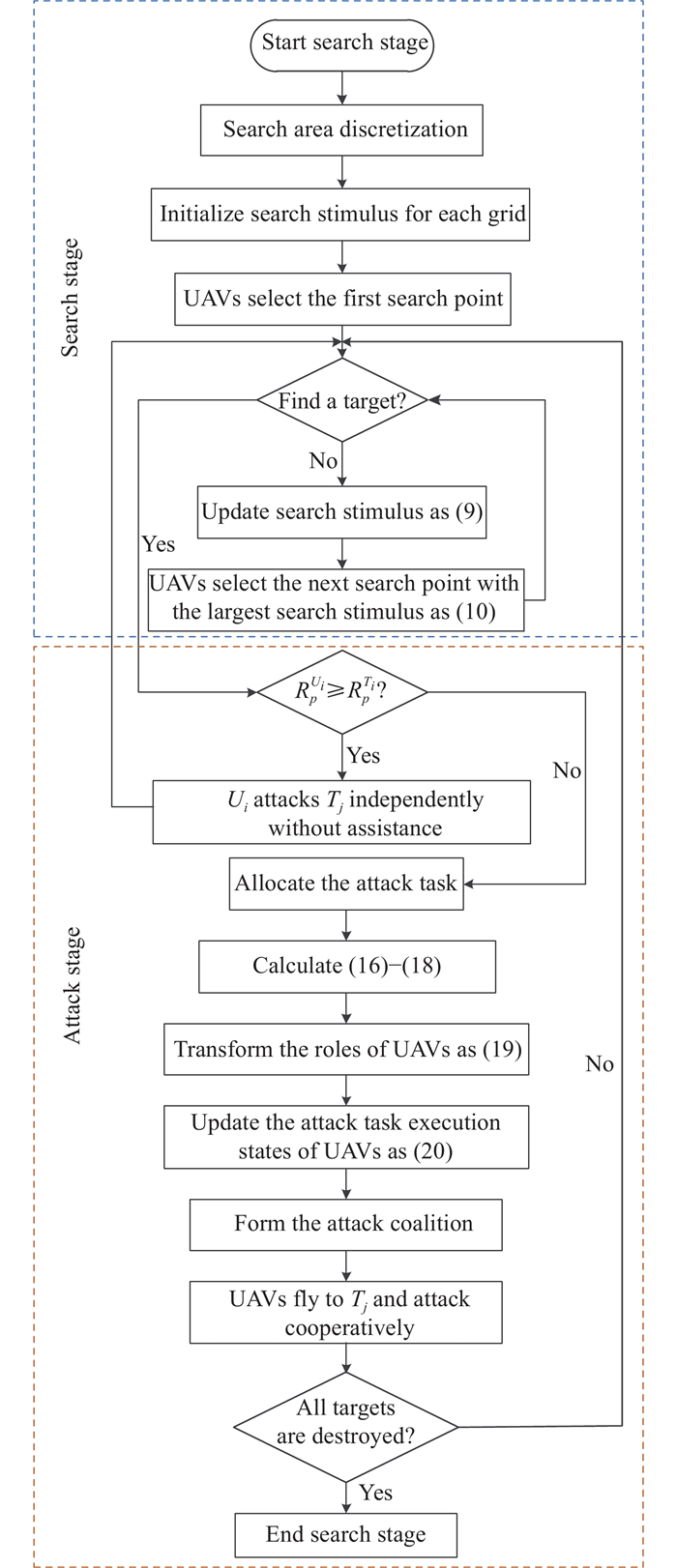
Table 2
Parameters of heterogeneous UAVs"
| UAV (Ui) | Type | Initial resource | Initial position (xi, yi)/m | Initial course angleoi/(o) |
| U1 | RS-UAV | (1,2,1) | (180,20) | 45 |
| U2 | (2,1,0) | (500,20) | 90 | |
| U3 | (2,2,1) | (820,20) | 135 | |
| U4 | (1,1,3) | (1 180,20) | 45 | |
| U5 | R-UAV | (0,0,0) | (1 500,20) | 90 |
| U6 | (0,0,0) | (1 820,20) | 135 |
Table 3
Parameters of targets"
| Target (Tj) | Initial resource requirement | Position (xj, yj)/m | Value |
| T1 | (3,2,1) | (780,780) | 3 |
| T2 | (2,3,1) | (1 620,980) | 5 |
| T3 | (1,0,2) | (980,1 620) | 4 |
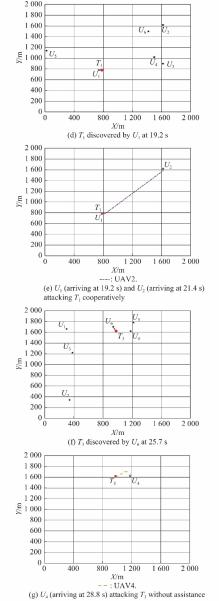
Fig 8
Complete operation process of six UAVs cooperative searching and attacking three targets"
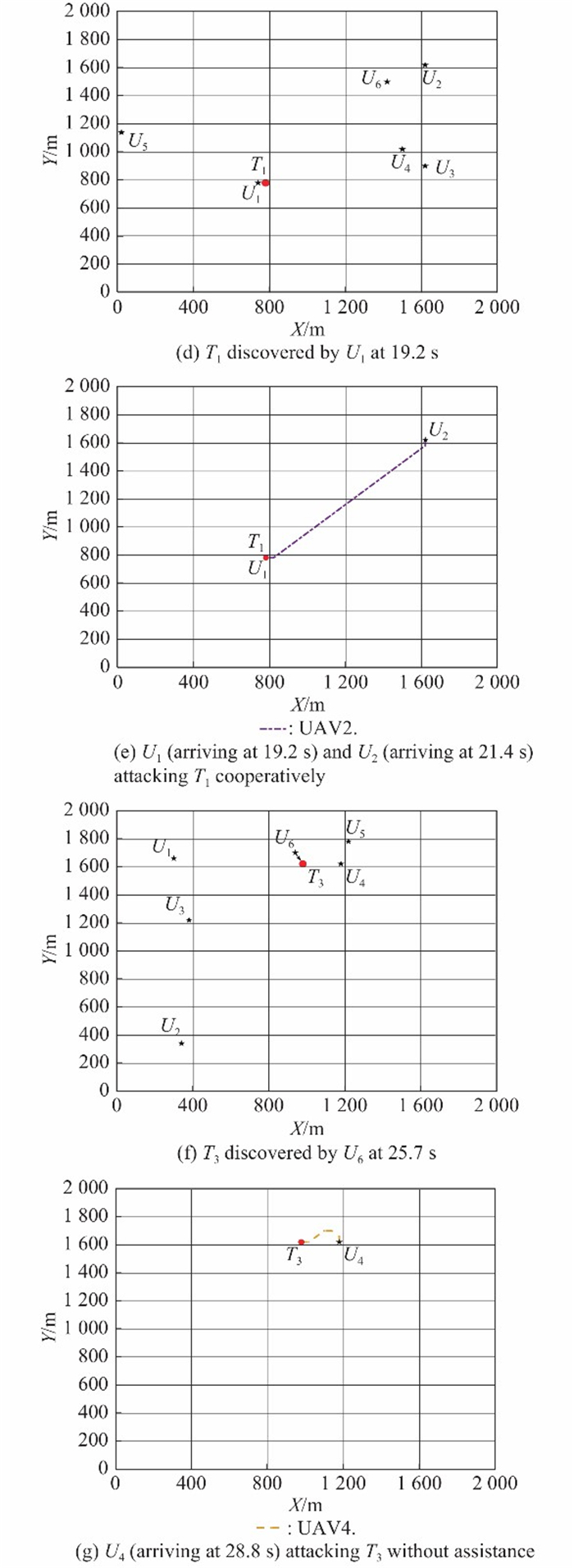
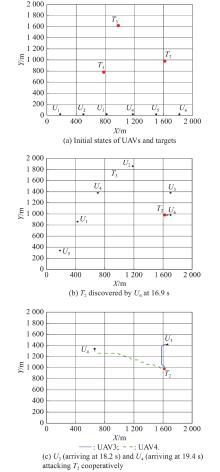
Fig 8
"
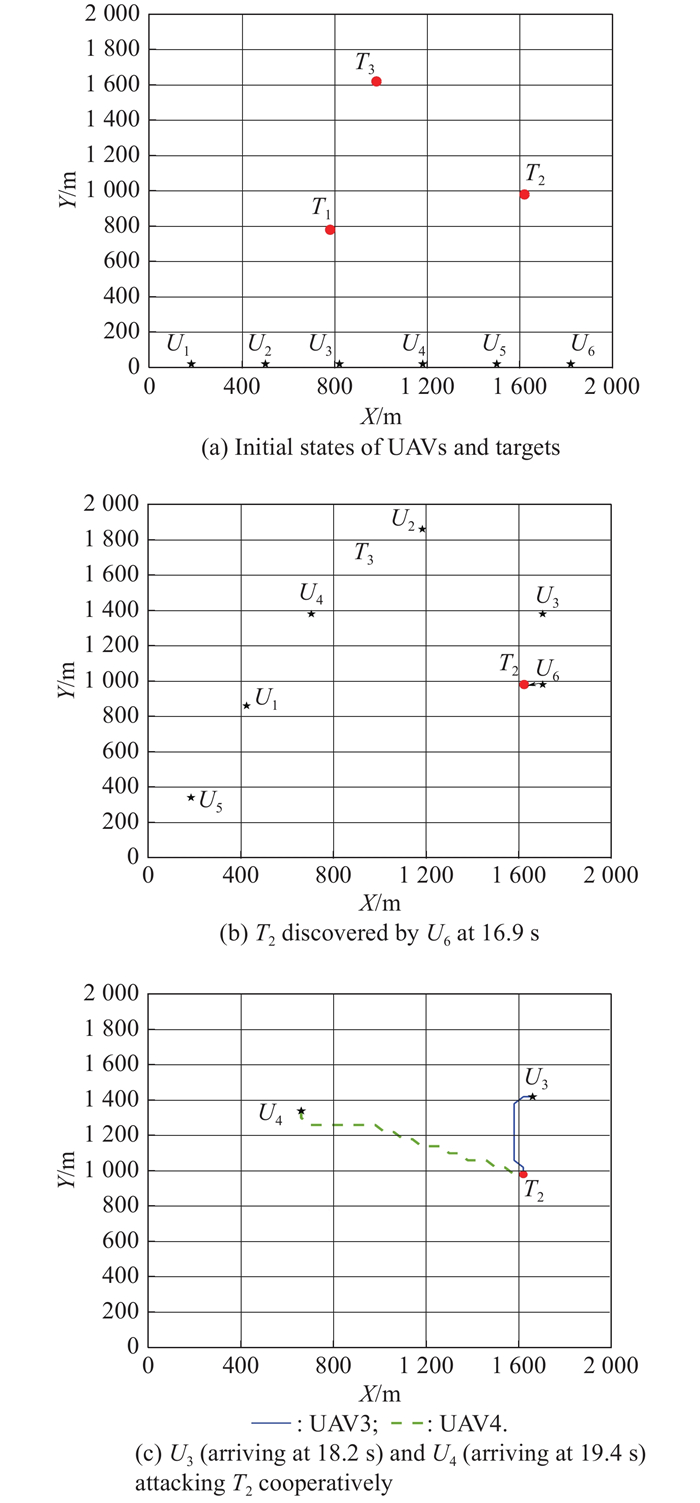
Table 4
Resource requirements of targets and UAV resources in different time points"
| Time/s | Target | Target resource requirement | UAV resource | Remaining resource |
| 18.2 | T2 | (2,3,1) | U3(2,2,1) U4(1,1,3) | (0,0,0) (1,0,3) |
| 19.4 | (0,1,0) | |||
| 19.2 | T1 | (3,2,1) | U1(1,2,1) U2(2,1,0) | (0,0,0) (0,1,0) |
| 21.4 | (2,0,0) | |||
| 28.8 | T3 | (1,0,2) | U4(1,0,3) | (0,0,1) |
Table 5
Combination ratio between R-UAVs and RS-UAVs"
| UAV swarm | Number of UAVs | |||
| R-UAVs | 1 | 2 | 3 | 4 |
| RS-UAVs | 4 | 8 | 12 | 16 |
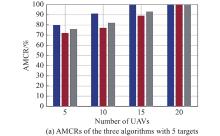
Fig 9
"
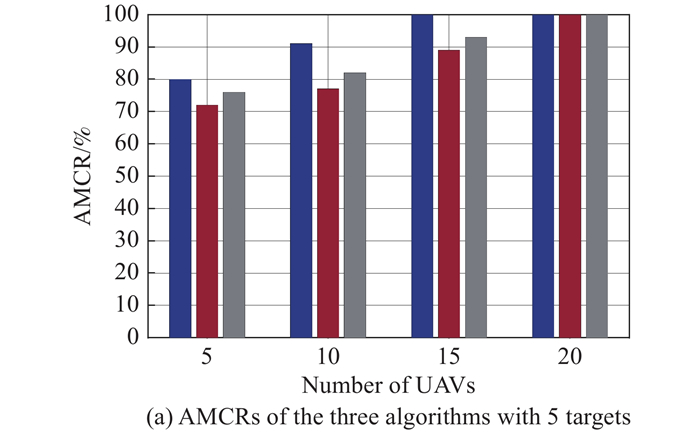
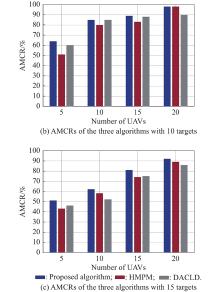
Fig 9
AMCRs of the three algorithms with different numbers of UAVs and targets"
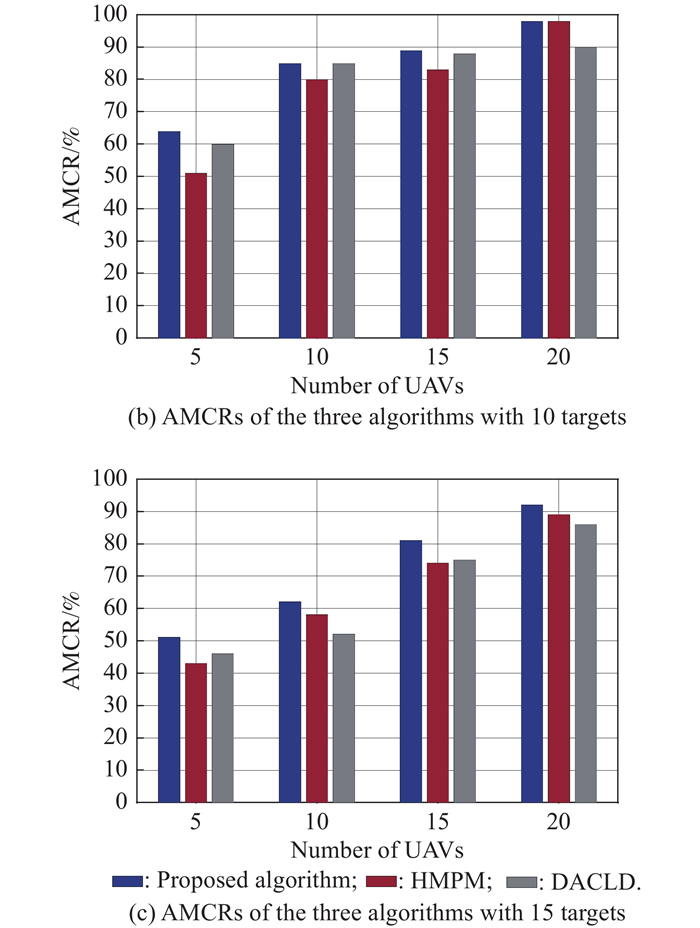
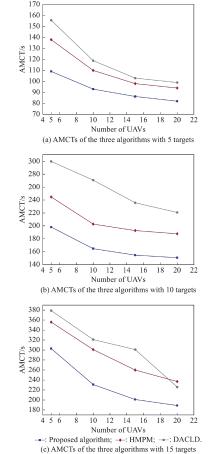
Fig 10
AMCTs of the three algorithms with different numbers of UAVs and targets"
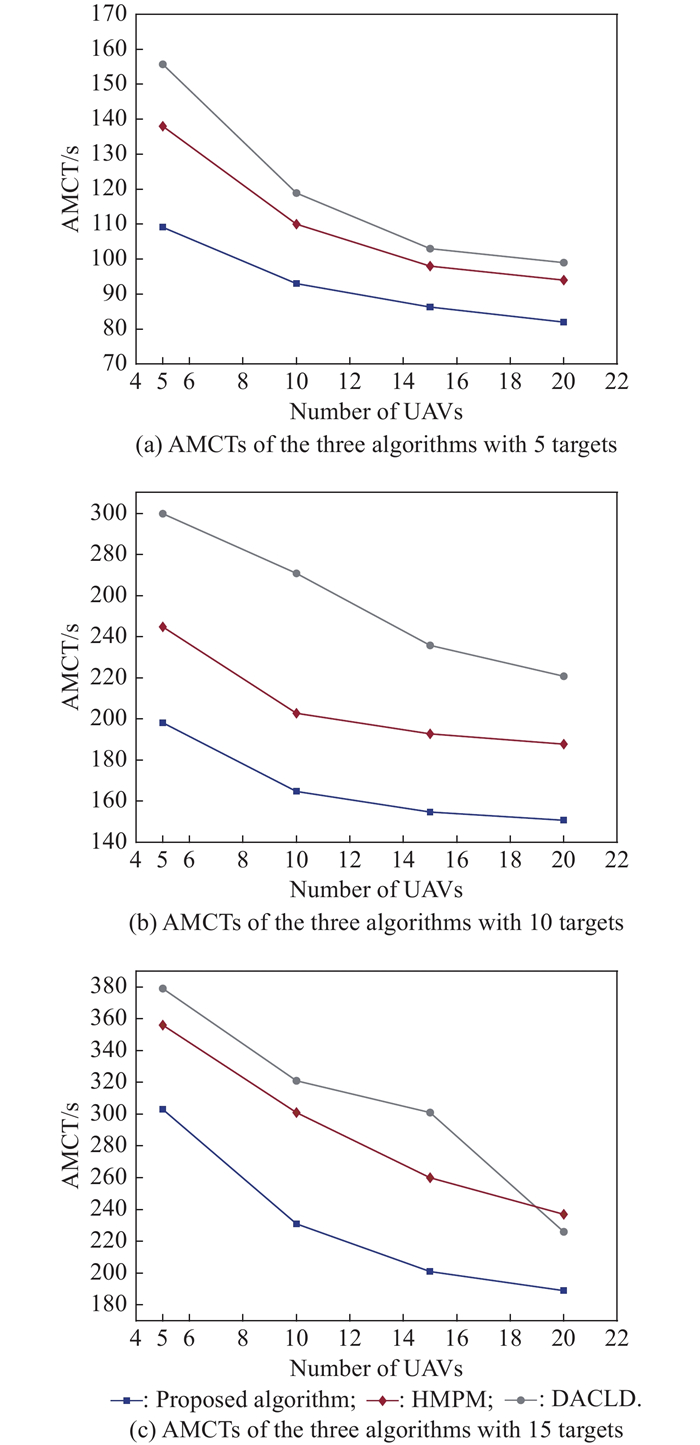

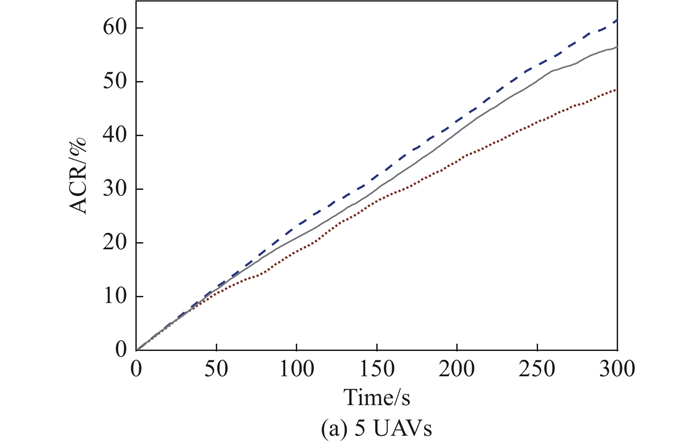
Fig 11
Curves of ACRs of the three search algorithms with different numbers of UAVs"
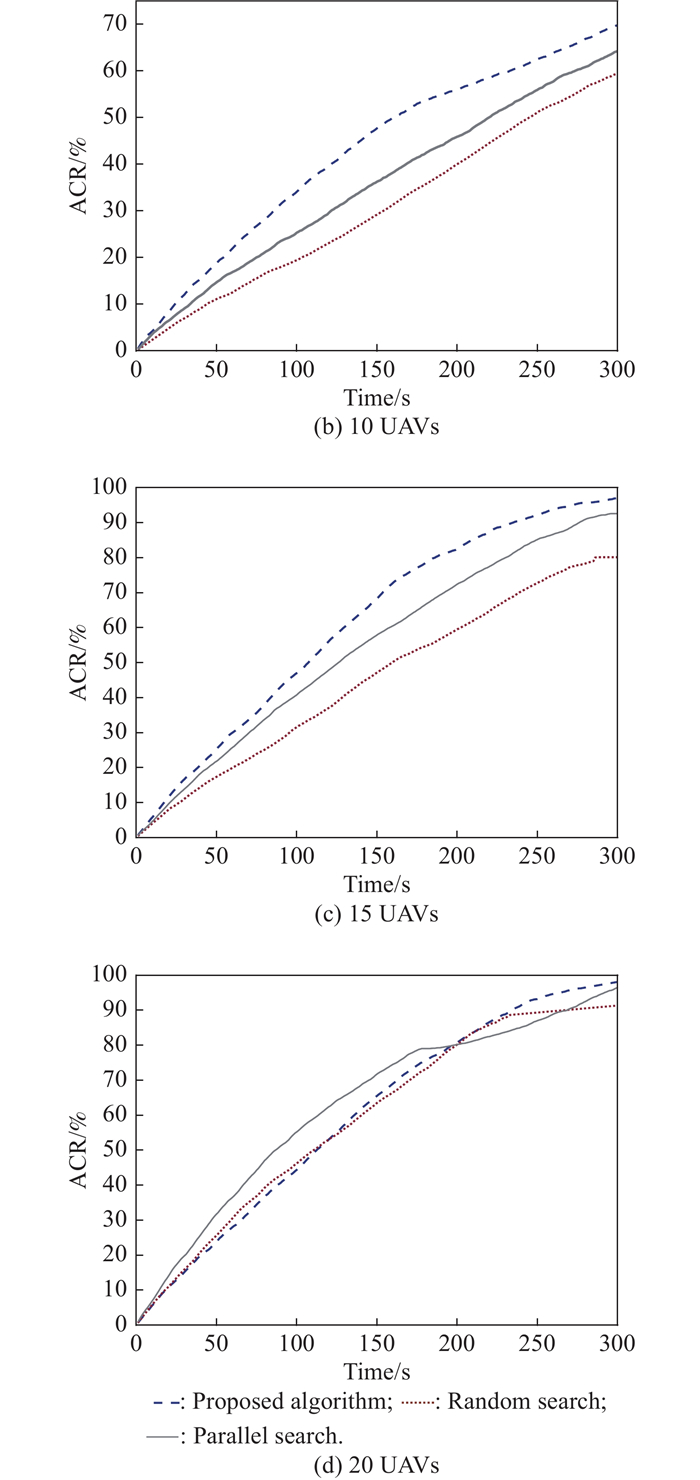
Fig 11
"
| 1 |
HONG L, GUO H Z, LIU J J, et al Toward swarm coordination: topology-aware inter-UAV routing optimization. IEEE Trans. on Vehicular Technology, 2020, 69 (9): 10177- 10187.
doi: 10.1109/TVT.2020.3003356 |
| 2 |
WANG Y, RU Z Y, WANG K, et al Joint deployment and task scheduling optimization for large-scale mobile users in multi-UAV-enabled mobile edge computing. IEEE Trans. on Cybernetics, 2020, 50 (9): 3984- 3997.
doi: 10.1109/TCYB.2019.2935466 |
| 3 |
KIM K S, KIM H Y, CHOI H L A bid-based grouping method for communication-efficient decentralized multi-UAV task allocation. International Journal of Aeronautical and Space Sciences, 2020, 21 (1): 290- 302.
doi: 10.1007/s42405-019-00205-1 |
| 4 |
ZHANG Y Z, FENG W C, SHI G Q, et al UAV swarm mission planning in dynamic environment using consensus-based bundle algorithm. Sensors, 2020, 20 (8): 2307- 2327.
doi: 10.3390/s20082307 |
| 5 |
ZHAO X Y, ZONG Q, TIAN B L, et al Fast task allocation for heterogeneous unmanned aerial vehicles through reinforcement learning. Aerospace Science and Technology, 2019, 92, 588- 594.
doi: 10.1016/j.ast.2019.06.024 |
| 6 |
XIE S Y, ZHANG A, BI W H, et al Multi-UAV mission allocation under constraint. Applied Sciences, 2019, 9 (11): 2184.
doi: 10.3390/app9112184 |
| 7 | MOON S, OH E, SHIM D H An integral framework of task assignment and path planning for multiple unmanned aerial vehicles in dynamic environments. Journal of Intelligent & Robotic Systems, 2013, 70 (1): 303- 313. |
| 8 |
CHEN X, LIU Y T, YIN L Y, et al Cooperative task assignment and track planning for multi-UAV attack mobile targets. Journal of Intelligent & Robotic Systems, 2020, 100 (3): 1383- 1400.
doi: 10.1007/s10846-020-01241-w |
| 9 |
HAFEZ A T, KAMEL M A Cooperative task assignment and trajectory planning of unmanned systems via HFLC and PSO. Unmanned Systems, 2019, 7 (2): 65- 81.
doi: 10.1142/S2301385019500018 |
| 10 | AUTENRIEB J, STRAWA N, SHIN H S, et al. A mission planning and task allocation framework for multi-UAV swarm coordination. Proc. of the Workshop on Research, Education and Development of Unmanned Aerial Systems, 2019: 297−304. |
| 11 | SUN X L, QI N M, CHENG D, et al Cooperative control algorithm of task assignment and path planning for multiple UAVs. Systems Engineering and Electronics, 2015, 37 (12): 2772- 2776. |
| 12 |
MOUSAVI S, AFGHAH F, ASHDOWN J D, et al Use of a quantum genetic algorithm for coalition formation in large-scale UAV networks. Ad Hoc Networks, 2019, 87, 26- 36.
doi: 10.1016/j.adhoc.2018.11.008 |
| 13 |
YAN F L Gauss interference ant colony algorithm-based optimization of UAV mission planning. The Journal of Supercomputing, 2020, 76 (2): 1170- 1179.
doi: 10.1007/s11227-018-2540-1 |
| 14 | ALHAQBANI A, KURDI H, YOUCEF-TOUMI K Fish-inspired task allocation algorithm for multiple unmanned aerial vehicles in search and rescue missions. Remote Sensing, 2021, 13 (1): 27- 35. |
| 15 |
ZHEN Z Y, ZHU P, XUE Y X, et al Distributed intelligent self-organized mission planning of multi-UAV for dynamic targets cooperative search-attack. Chinese Journal of Aeronautics, 2019, 32 (12): 2706- 2716.
doi: 10.1016/j.cja.2019.05.012 |
| 16 |
YAN F, ZHU X P, ZHOU Z, et al Real-time task allocation for a heterogeneous multi-UAV simultaneous attack. Scientia Sinica Informationis, 2019, 49 (5): 555- 569.
doi: 10.1360/N112018-00338 |
| 17 | ZHEN Z Y, XING D J, GAO C Cooperative search-attack mission planning for multi-UAV based on intelligent self-organized algorithm. Aerospace Science & Technology, 2018, 76, 402- 411. |
| 18 | WU W N, CUI N G, GUO J F, et al Distributed integrated method for mission planning of heterogeneous unmanned aerial vehicles. Journal of Jilin University (Engineering and Technology Edition), 2018, 48 (6): 1827- 1837. |
| 19 |
YE F, CHEN J, SUN Q, et al Decentralized task allocation for heterogeneous multi-UAV system with task coupling constraints. The Journal of Supercomputing, 2021, 77 (1): 111- 132.
doi: 10.1007/s11227-020-03264-4 |
| 20 | SLOWIK A, KWASNICKA H Nature inspired methods and their industry applications—swarm intelligence algorithms. IEEE Trans. on Industrial Informatics, 2017, 14 (3): 1004- 1015. |
| 21 | KIM M H, BAIK H, LEE S Response threshold model based UAV search planning and task allocation. Journal of Intelligent & Robotic Systems, 2014, 75 (3): 625- 640. |
| 22 | WU H S, LI H, XIAO R B, et al Modeling and simulation of dynamic ant colony’s labor division for task allocation of UAV swarm. Physica A: Statistical Mechanics & Its Applications, 2018, 491 (2): 127- 141. |
| 23 |
KURDI H, ALDAOOD M F, AL-MEGREN S, et al Adaptive task allocation for multi-UAV systems based on bacteria foraging behaviour. Applied Soft Computing, 2019, 83, 105643.
doi: 10.1016/j.asoc.2019.105643 |
| 24 |
KURDI H A, EBTESAM A, MARAM A, et al Autonomous task allocation for multi-UAV systems based on the locust elastic behavior. Applied Soft Computing, 2018, 71, 110- 126.
doi: 10.1016/j.asoc.2018.06.006 |
| 25 |
MURO C, ESCOBEDO R, SPECTOR L, et al Wolf-pack (canis lupus) hunting strategies emerge from simple rules in computational simulations. Behavioural Processes, 2011, 88 (3): 192- 197.
doi: 10.1016/j.beproc.2011.09.006 |
| 26 |
MECH L D Alpha status, dominance, and division of labor in wolf packs. Canadian Journal of Zoology, 1999, 77 (8): 1196- 1203.
doi: 10.1139/z99-099 |
| 27 | MADDEN J D, ARKIN R C, MACNULTY D R. Multi-robot system based on model of wolf hunting behavior to emulate wolf and elk interactions. Proc. of the IEEE International Conference on Robotics & Biomimetics, 2011: 1043–1050. |
| 28 | WU H S, XUE J J, XIAO R B, et al Uncertain bilevel knapsack problem based on an improved binary wolf pack algorithm. Frontiers of Information Technology & Electronic Engineering, 2020, 21, 1356- 1368. |
| 29 |
XIAO R B, WU H S, HU L, et al A swarm intelligence labour division approach to solving complex area coverage problems of swarm robots. International Journal of Bio-Inspired Computation, 2020, 15 (4): 224- 238.
doi: 10.1504/IJBIC.2020.108598 |
| 30 | XIAO R B, WANG Y C Labour division in swarm intelligence for allocation problems: a survey. International Journal of Bio-Inspired Computation, 2018, 12 (2): 8- 12. |
| 31 | LIANG W H, HE J H, WANG S X, et al Improved cluster collaboration algorithm based on wolf pack behavior. Cluster Computing, 2019, 22 (3): 6181- 6196. |
| 32 |
BASSING S B, AUSBAND D E, MITCHELL M S, et al Stable pack abundance and distribution in a harvested wolf population. The Journal of Wildlife Management, 2019, 83 (3): 577- 590.
doi: 10.1002/jwmg.21616 |
| 33 |
BUGLIONE M, TROISI S R, PETRELLI S, et al The first report on the ecology and distribution of the wolf population in cilento, vallo di siano and alburni national park. Biology Bulletin, 2020, 47 (6): 640- 654.
doi: 10.1134/S1062359021010040 |
| 34 |
HU J Q, WU H S, ZHONG B, et al Swarm intelligence-based optimisation algorithms: an overview and future research issues. International Journal of Automation and Control, 2020, 14 (5/6): 656- 693.
doi: 10.1504/IJAAC.2020.110077 |
| 35 |
PIOTROWSKI A P, NAPIORKOWSKI M J, NAPIORKOWSKI J J, et al Swarm intelligence and evolutionary algorithms: performance versus speed. Information Sciences, 2017, 384, 34- 85.
doi: 10.1016/j.ins.2016.12.028 |
| 36 |
NEDJAH N, MOURELLE L D M, MORAIS R G Inspiration-wise swarm intelligence meta-heuristics for continuous optimisation: a survey−part I. International Journal of Bio-Inspired Computation, 2020, 15 (4): 207- 223.
doi: 10.1504/IJBIC.2020.108597 |
| 37 |
YAN F, ZHU X P, ZHOU Z, et al A hierarchical mission planning method for simultaneous arrival of multi-UAV coalition. Applied Sciences, 2019, 9 (10): 1986- 2004.
doi: 10.3390/app9101986 |
| [1] | Yangyang JIANG, Yan GAO, Wenqi SONG, Yue LI, Quan QUAN. Bibliometric analysis of UAV swarms [J]. Journal of Systems Engineering and Electronics, 2022, 33(2): 406-425. |
| [2] | Husheng WU, Hao LI, Renbin XIAO. A blockchain bee colony double inhibition labor division algorithm for spatio-temporal coupling task with application to UAV swarm task allocation [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1180-1199. |
| [3] | Yu Liu, Xiaoxi Ling, Yu Liang, and Guanghao Liu. Improved artificial bee colony algorithm with mutual learning [J]. Journal of Systems Engineering and Electronics, 2012, 23(2): 265-275. |
| [4] | Chaohua Dai1,Weirong Chen1,Yonghua Song2,and Yunfang Zhu3. Seeker optimization algorithm:a novel stochastic search algorithm for global numerical optimization [J]. Journal of Systems Engineering and Electronics, 2010, 21(2): 300-311. |
| [5] | Zheng Yongkang, Chen Weirong, Dai Chaohua & Wang Weibo. Stochastic focusing search: a novel optimization algorithm for real-parameter optimization [J]. Journal of Systems Engineering and Electronics, 2009, 20(4): 869-876. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||