
Journal of Systems Engineering and Electronics ›› 2021, Vol. 32 ›› Issue (6): 1450-1462.doi: 10.23919/JSEE.2021.000123
• SYSTEMS ENGINEERING • Previous Articles Next Articles
Alireza MOHSENI*( ), Vincent DUCHAINE(), Tony WONG
), Vincent DUCHAINE(), Tony WONG
Received:2020-11-10
Accepted:2021-11-09
Online:2022-01-05
Published:2022-01-05
Contact:
Alireza MOHSENI
E-mail:ar.mohseni@yahoo.com;vincent.duchaine@etsmtl.ca
About author:Alireza MOHSENI, Vincent DUCHAINE, Tony WONG. Experimental study of path planning problem using EMCOA for a holonomic mobile robot[J]. Journal of Systems Engineering and Electronics, 2021, 32(6): 1450-1462.
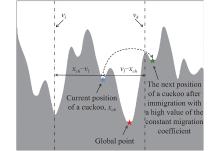
Fig 1
A geometric explanation of MC boundaries"
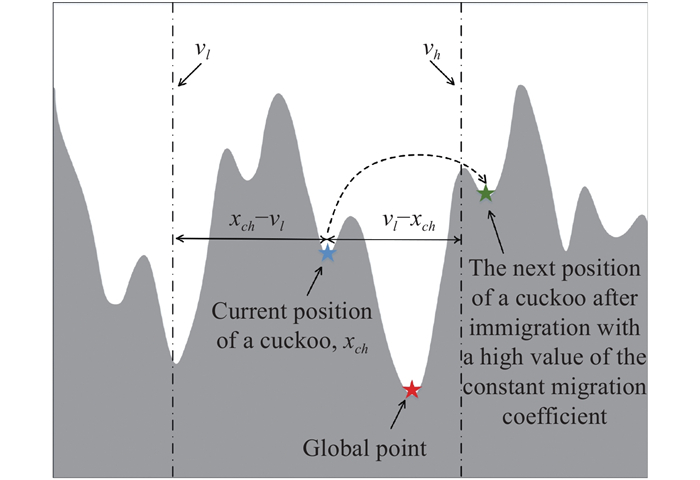

Fig 2
Illustration of the mutated MC"
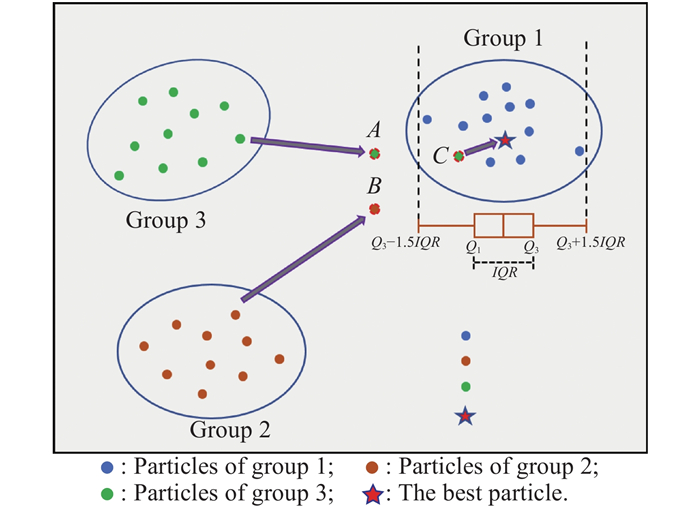

Fig 3
KUKA youBot equipped with a 2-D LiDAR and on-board laptop"

Table 1
YouBot detailed base specifications"
| Parameter | Value | |
| Motor | Nominal voltage/V | 24 |
| Nominal current/A | 2.32 | |
| Nominal torque/mN·m | 82.7 | |
| Moment of inertia/kg·mm2 | 13.5 | |
| Rated speed/rpm | 5250 | |
| Gearbox | Reduction ratio | 26 |
| Moment of inertia/kg·mm2 | 0.14 | |
| Encoder | Counts per revolution | 4000 |
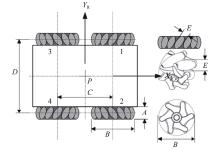
Fig 4
Base geometry"
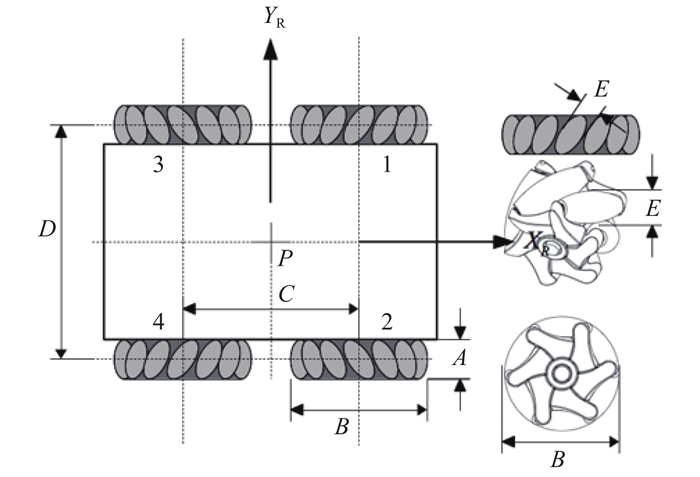
Fig 5
Navigation setup for the youBot"
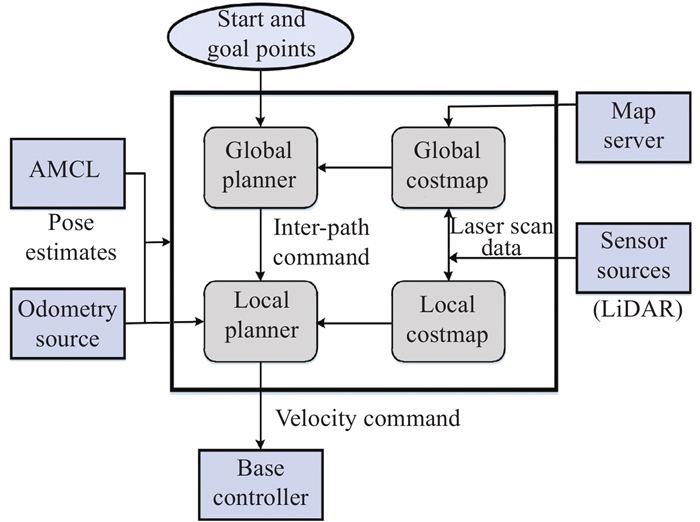
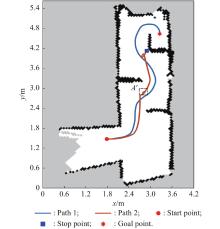
Fig 6
Traversed path representation of the EMCOA algorithm compared with the MCOA algorithm in a known environment"
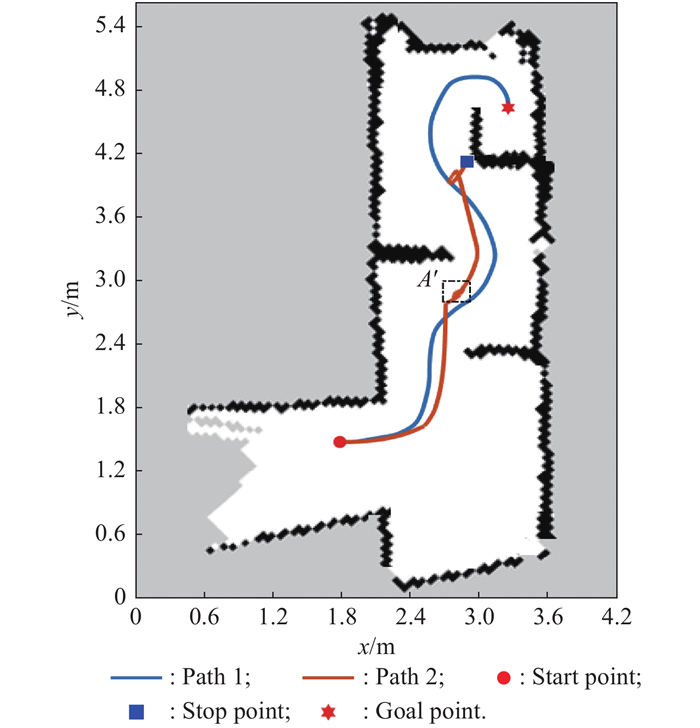
Table 2
Values for parameters of the EMCOA algorithm"
| Parameter | Value |
| | 14 |
| | 0 |
| | 6 |
| | 5 |
| | 3 |
| a | 5 |
| b | 1 |
| | 0.09 |
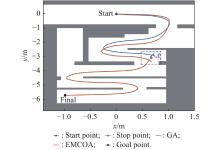
Fig 7
Path-traversed representation of the EMCOA and GA in a maze environment"
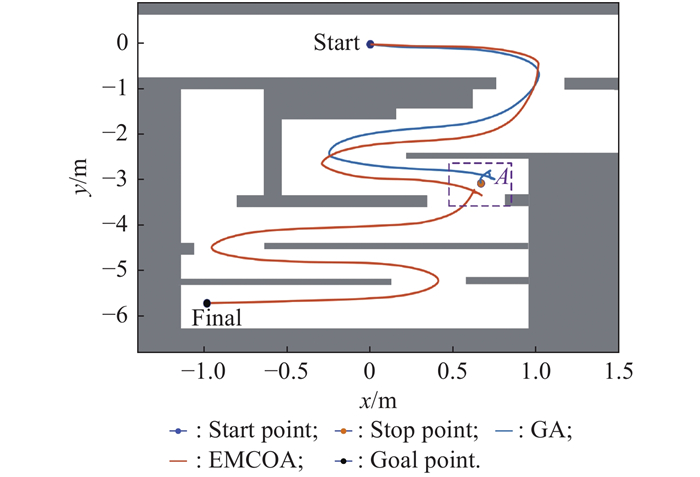
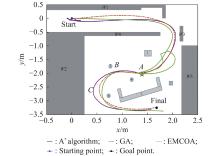
Fig 8
Path-traversed representation of EMCOA, GA, and A ${^{*}}$ algorithms in a known environment "
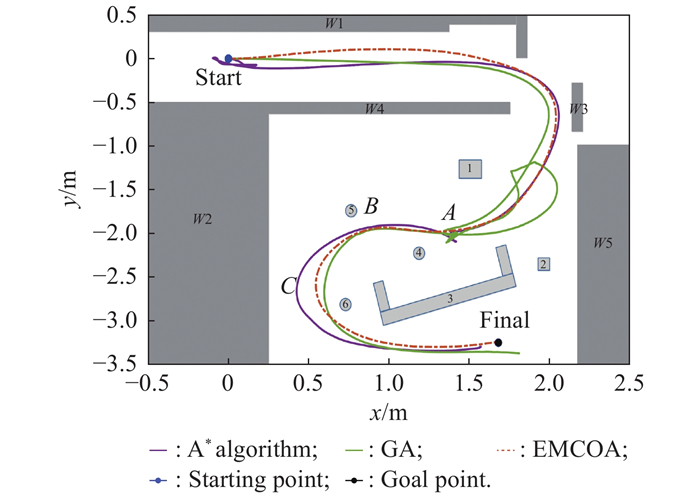
Table 3
Best-traversed time and path length associated with EMCOA, GA and A $^{\mathrm{*}}$ algorithms (in Fig. 8) "
| Algorithm | Traversed time/s | Path length/m |
| EMCOA | 21.46 | 6.68 |
| GA | 32.67 | 10.48 |
| | 24.81 | 8.13 |
Fig 9
Best-traversed paths using the EMCOA algorithm as a global path planner in a partially unknown environment"
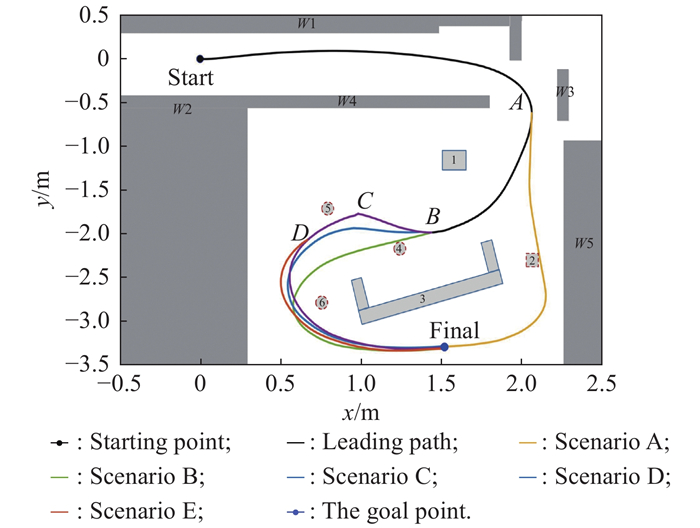
Table 4
Traversed time and path length associated with three algorithms in a partially unknown environment"
| Algorithm | Traversed time/s | Path length/m |
| EMCOA | 23.46 | 7.31 |
| GA | >> 45 | N/A |
| | 30.82 | 8.39 |
| 1 | LAVALLE S M. Planning algorithms. Cambridge: Cambridge University Press, 2006. |
| 2 |
QU H, YANG X S, WILLMS A R, et al Real-time robot path planning based on a modified pulse-coupled neural network model. IEEE Trans. On Neural Networks, 2009, 20 (11): 1724- 1739.
doi: 10.1109/TNN.2009.2029858 |
| 3 | YUN S C, PARASURAMAN S, GANAPATHY V. Dynamic path planning algorithm in mobile robot navigation. Proc. of the IEEE Symposium on Industrial Electronics and Applications, 2011: 364–369. |
| 4 | YAZDANI H, FALLAH A, HOSEINI S M A new approach for robot path planning with genetic algorithms. Journal of Basic and Applied Scientific Research, 2012, 4, 4122- 4129. |
| 5 | TAXIR M L, AZOUAUI O, HAZERCHI M, et al Mobile robot path planning for complex dynamic environments. Proc. of the International Conference on Advanced Robotics, 2015, 200- 206. |
| 6 | DE CARVALJO SANTOS V, FABIANO MOTTA TOLEDO C, SANTOS OSORIO F An exploratory path planning method based on genetic algorithm for autonomous mobile robots. Proc. of the 2015 IEEE Congress on Evolutionary Computation, 2015, 62- 69. |
| 7 | GARRIDO S, BLANCO D, MORENO L. SLAM and exploration using differential evolution and fast marching. InTechOpen, 2011. |
| 8 | YU C Q, WANG Z R. UAV path planning using gso-de algorithm. Proc. of the 2013 IEEE International Conference of IEEE Region, 2013: 1–4. |
| 9 |
MO H W, MENG L L Robot path planning based on differential evolution in static environment. International Journal of Digital Content Technology and its Applications, 2012, 6 (20): 122- 129.
doi: 10.4156/jdcta.vol6.issue20.14 |
| 10 | JATI A, SINGH G, RAKSHIT P, et al. A hybridisation of improved harmony search and bacterial foraging for multi-robot motion planning. Proc. of the IEEE Congress on Evolutionary Computation, 2012: 1–8. |
| 11 | PANOV S, KOCESKI S. Harmony search-based algorithm for mobile robot global path planning. Proc. of the 2nd Mediterranean Conference on Embedded Computing, 2013: 168–171. |
| 12 |
DRAKE D, KOZIOL S, CHABOT E Mobile robot path planning with a moving goal. IEEE Access, 2018, 6, 12800- 12814.
doi: 10.1109/ACCESS.2018.2797070 |
| 13 |
FARIDI A Q, SHARMA S, SHUKLA A, et al Multi-robot multi-target dynamic path planning using artificial bee colony and evolutionary programming in unknown environment. Intelligent Service Robotics, 2018, 11 (2): 171- 186.
doi: 10.1007/s11370-017-0244-7 |
| 14 | JIANG L, HUANG H Y, DING Z H Path planning for intelligent robots based on deep q-learning with experience replay and heuristic knowledge. IEEE/CAA Journal of Automatica Sinica, 2019, 7 (4): 1179- 1189. |
| 15 |
LAMINI C, BENHLIMA S, ELBEKRI A Genetic algorithm-based approach for autonomous mobile robot path planning. Procedia Computer Science, 2018, 127, 180- 189.
doi: 10.1016/j.procs.2018.01.113 |
| 16 |
PARQUE V, MIYASHITA T Smooth curve fitting of mobile robot trajectories using differential evolution. IEEE Access, 2020, 8, 82855- 82866.
doi: 10.1109/ACCESS.2020.2991003 |
| 17 |
LI F L, FAN X J, HOU Z X A firefly algorithm with self-adaptive population size for global path planning of mobile robot. IEEE Access, 2020, 8, 168951- 168964.
doi: 10.1109/ACCESS.2020.3023999 |
| 18 |
YU X, CHEN W N, GU T L, et al ACO-A*: ant colony optimization plus A* for 3-D traveling in environments with dense obstacles. IEEE Trans on Evolutionary Computation, 2019, 23 (4): 617- 631.
doi: 10.1109/TEVC.2018.2878221 |
| 19 | LI Z Y, LIU W D, GAO L E, et al Path planning method for AUV docking based on adaptive quantum-behaved particle swarm optimization. IEEE Access, 2019, 78665- 78674. |
| 20 |
ZHANG J H, ZHANG Y, ZHOU Y Path planning of mobile robot based on hybrid multi-objective bare bones particle swarm optimization with differential evolution. IEEE Access, 2018, 6, 44542- 44555.
doi: 10.1109/ACCESS.2018.2864188 |
| 21 | JUAN C F, LIN C H, AND BUI T B Multi-objective rule-based cooperative continuous ant colony optimized fuzzy systems with a robot control application. IEEE Trans. on Cybernetics, 2018, 50 (2): 650- 663. |
| 22 | JUANG C F, LIN C H, BUI T B Multi-objective rule-based cooperative continuous ant colony optimized fuzzy systems with a robot control application. IEEE Trans. on Cybernetics, 2019, 115, 106- 120. |
| 23 |
NAZARAHARI M, KHANMIRZA E, DOOSTIE S Multi-objective multi-robot path planning in continuous environment using an enhanced genetic algorithm. Expert Systems with Applications, 2019, 115, 106- 120.
doi: 10.1016/j.eswa.2018.08.008 |
| 24 | YANG X S. Nature-inspired optimization algorithms. Waltham: Academic Press, 2020. |
| 25 | MOHSENI A, DUCHAIN V, WONG T. A comparative study of the optimal control design using evolutionary algorithms: application on a close-loop system. Proc. of the Intelligent Systems Conference, 2017: 942–948. |
| 26 |
MOHSENI A, WONG T, DUCHAIN V MCOA: mutated and self-adaptive cuckoo optimization algorithm. Evolutionary Intelligence, 2016, 9 (1/2): 21- 36.
doi: 10.1007/s12065-016-0135-4 |
| 27 |
RAJABIOUN R Cuckoo optimization algorithm. Applied Soft Computing, 2011, 11 (8): 5508- 5518.
doi: 10.1016/j.asoc.2011.05.008 |
| 28 | Youbot. Youbot detailed specifications –detailed base geometry. 2014. http://www.youbot-store.com/wiki/index.php/File:MeasurementData.png |
| 29 | DE GREEF F. Kuka youbot simulation. Amsterdam, Netherlands: University of Amsterdam, 2015. |
| [1] | Lanyong ZHANG, Ruixuan ZHANG. Research on UAV cloud control system based on ant colony algorithm [J]. Journal of Systems Engineering and Electronics, 2022, 33(4): 805-811. |
| [2] | Gang LIU, Zhibiao AN, Songyang LAO, Wu LI. Firepower distribution method of anti-ship missile based on coupled path planning [J]. Journal of Systems Engineering and Electronics, 2022, 33(4): 1010-1024. |
| [3] | Huixiang ZHEN, Wenyin GONG, Ling WANG. Data-driven evolutionary sampling optimization for expensive problems [J]. Journal of Systems Engineering and Electronics, 2021, 32(2): 318-330. |
| [4] | Zhen XU, Enze ZHANG, Qingwei CHEN. Rotary unmanned aerial vehicles path planning in rough terrain based on multi-objective particle swarm optimization [J]. Journal of Systems Engineering and Electronics, 2020, 31(1): 130-141. |
| [5] | Qiming YANG, Jiandong ZHANG, Guoqing SHI. Modeling of UAV path planning based on IMM under POMDP framework [J]. Journal of Systems Engineering and Electronics, 2019, 30(3): 545-554. |
| [6] | Zhenxing ZHANG, Rennong YANG, Huanyu LI, Yuhuan FANG, Zhenyu HUANG, Ying ZHANG. Antlion optimizer algorithm based on chaos search and its application [J]. Journal of Systems Engineering and Electronics, 2019, 30(2): 352-365. |
| [7] | Xiaoxuan Hu, Yanhong Liu, and Guoqiang Wang. Optimal search for moving targets with sensing capabilities using multiple UAVs [J]. Systems Engineering and Electronics, 2017, 28(3): 526-535. |
| [8] | Yani Cui, Jia Ren, Wencai Du, and Jingguo Dai. UAV target tracking algorithm based on task allocation consensus [J]. Journal of Systems Engineering and Electronics, 2016, 27(6): 1207-1218. |
| [9] | Mingyong Liu, Baogui Xu, and Xingguang Peng. Cooperative path planning for multi-AUV in time-varying ocean flows [J]. Systems Engineering and Electronics, 2016, 27(3): 612-618. |
| [10] | Xiang Gao, Yangwang Fang, and Youli Wu. Fuzzy Q learning algorithm for dual-aircraft path planning to cooperatively detect targets by passive radars [J]. Journal of Systems Engineering and Electronics, 2013, 24(5): 800-810. |
| [11] | Yuxing Mao, Ching Y. Suen, and Wei He. Extraction of affine invariant features for shape recognition based on ant colony optimization [J]. Journal of Systems Engineering and Electronics, 2011, 22(6): 1003-1009. |
| [12] | Xin Liu, Chengping Zhou, and Mingyue Ding. 3D multipath planning for UAV based on network graph [J]. Journal of Systems Engineering and Electronics, 2011, 22(4): 640-646. |
| [13] | Wang Lingxiao & Zhou Deyun. Effective path planning method for low detectable aircraft [J]. Journal of Systems Engineering and Electronics, 2009, 20(4): 784-789. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||