
Journal of Systems Engineering and Electronics ›› 2021, Vol. 32 ›› Issue (4): 956-970.doi: 10.23919/JSEE.2021.000082
• CONTROL THEORY AND APPLICATION • Previous Articles Next Articles
Hui WAN1( ), Xiaohui QI1(), Jie LI2,*()
), Xiaohui QI1(), Jie LI2,*()
Received:2020-11-10
Online:2021-08-18
Published:2021-09-30
Contact:
Jie LI
E-mail:huiwan_0425@163.com;qi-xh@163.com;lijienewlife1234@163.com
About author:Supported by:Hui WAN, Xiaohui QI, Jie LI. Stability analysis of linear/nonlinear switching active disturbance rejection control based MIMO continuous systems[J]. Journal of Systems Engineering and Electronics, 2021, 32(4): 956-970.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
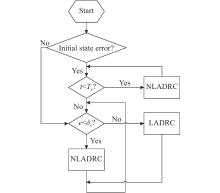
Fig 1
Scheme of SADRC"
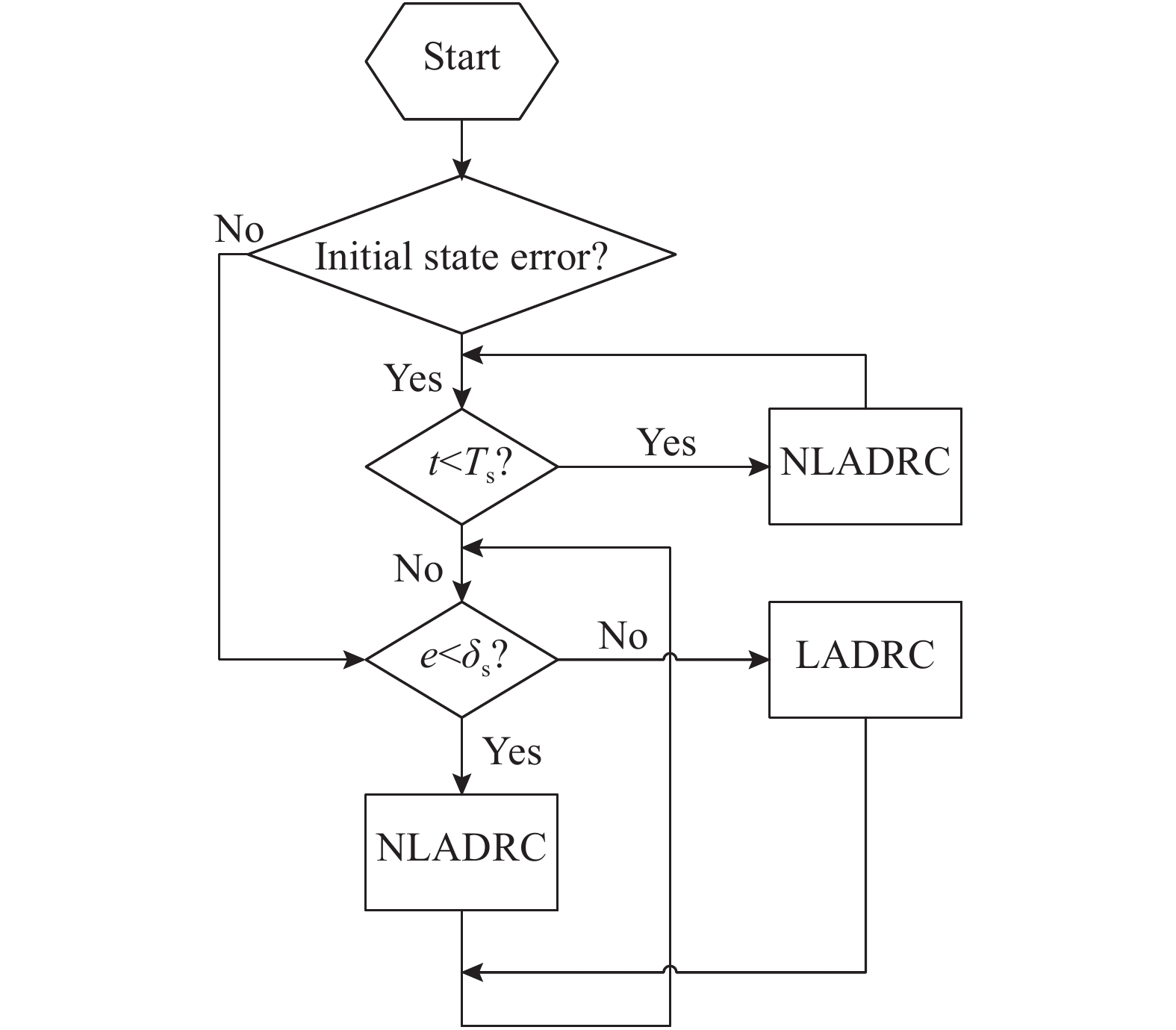
Table 1
Parameters of LADRC, NLADRC and SADRC controllers"
| Controller | y1 channel | y2 channel |
| LADRC[ | ξ = 1.83, wo = 13, wc = 1.1, b0 = 10 | ξ = 2.2, wo = 2, wc = 1.68, b0 = ?14 |
| NLADRC | r1 = 10, h1 = 0.45, c = 0.15, α1 = 0.5, α2 = 0.25, δ = 0.0005, β01 = 1, β02 = 1.11, β03 = 0.1736 | r1 = 10, h1 = 0.45, c = 0.15, α1 = 0.5, α2 = 0.25, δ = 0.0005, β01 = 1, β02 = 1.11, β03 = 0.1736 |
| SADRC | α1 = 1, α2 = 0.5, α3 = 0.25, wc = 1.1, wo = 10, woN = 5, δs = 0.005, δ = 0.002, b0 = 1, β01 = 3 woN, β02 = 3woN2/5, β03 = woN3/9 | α1 = 1, α2 = 0.5, α3 = 0.25, wc = 1.68, wo = 10, wo = 5, δs = 0.005, δ = 0.002, b0 = 1, β01 = 3woN, β02 = 3woN2/5, β03 = woN3/9 |
Fig 2
Curves of λ0i (i = 1,2,3) about e "
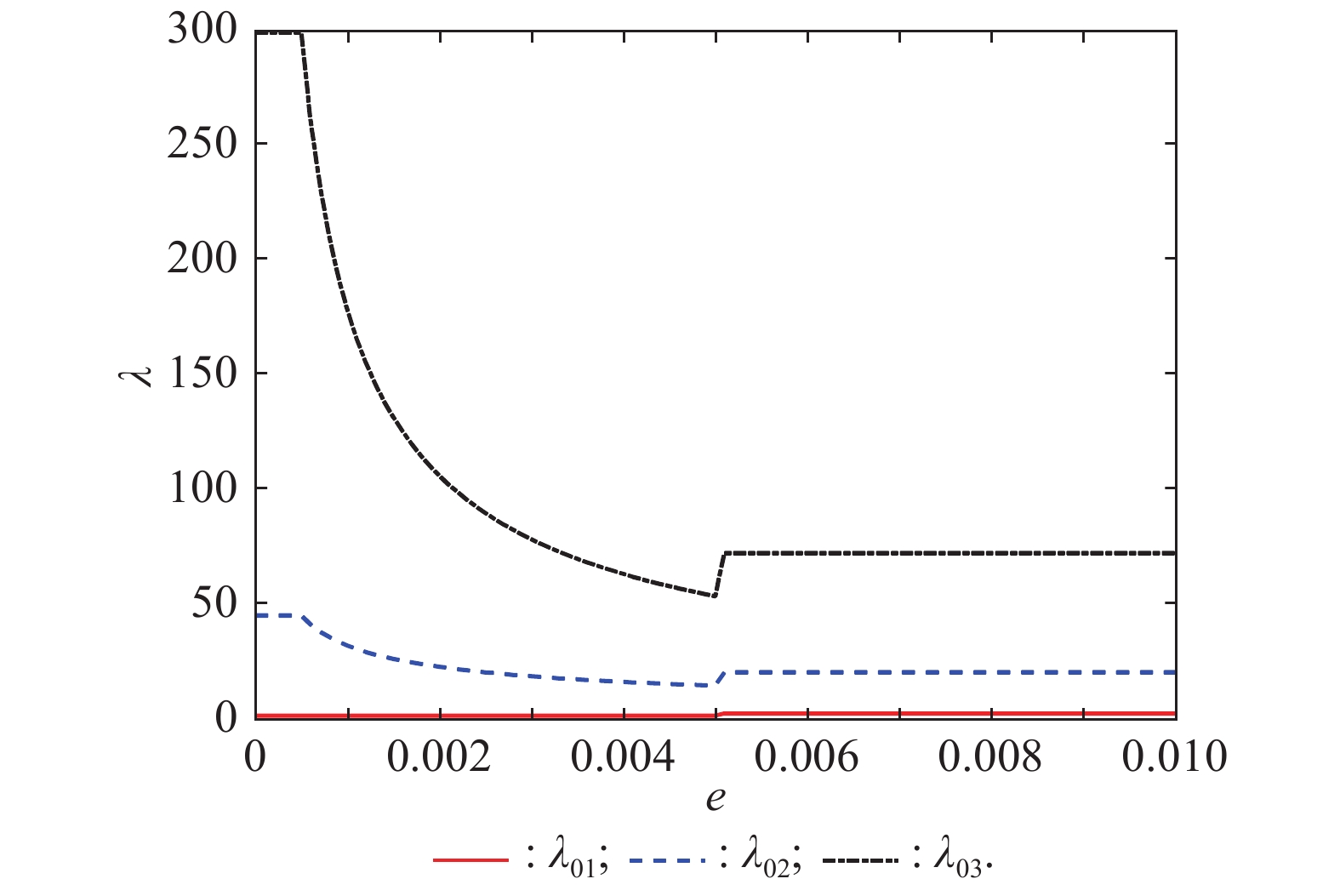
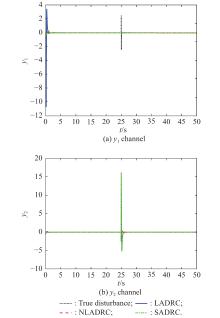
Fig 4
Observed “total disturbance” for the binary distillation column system"
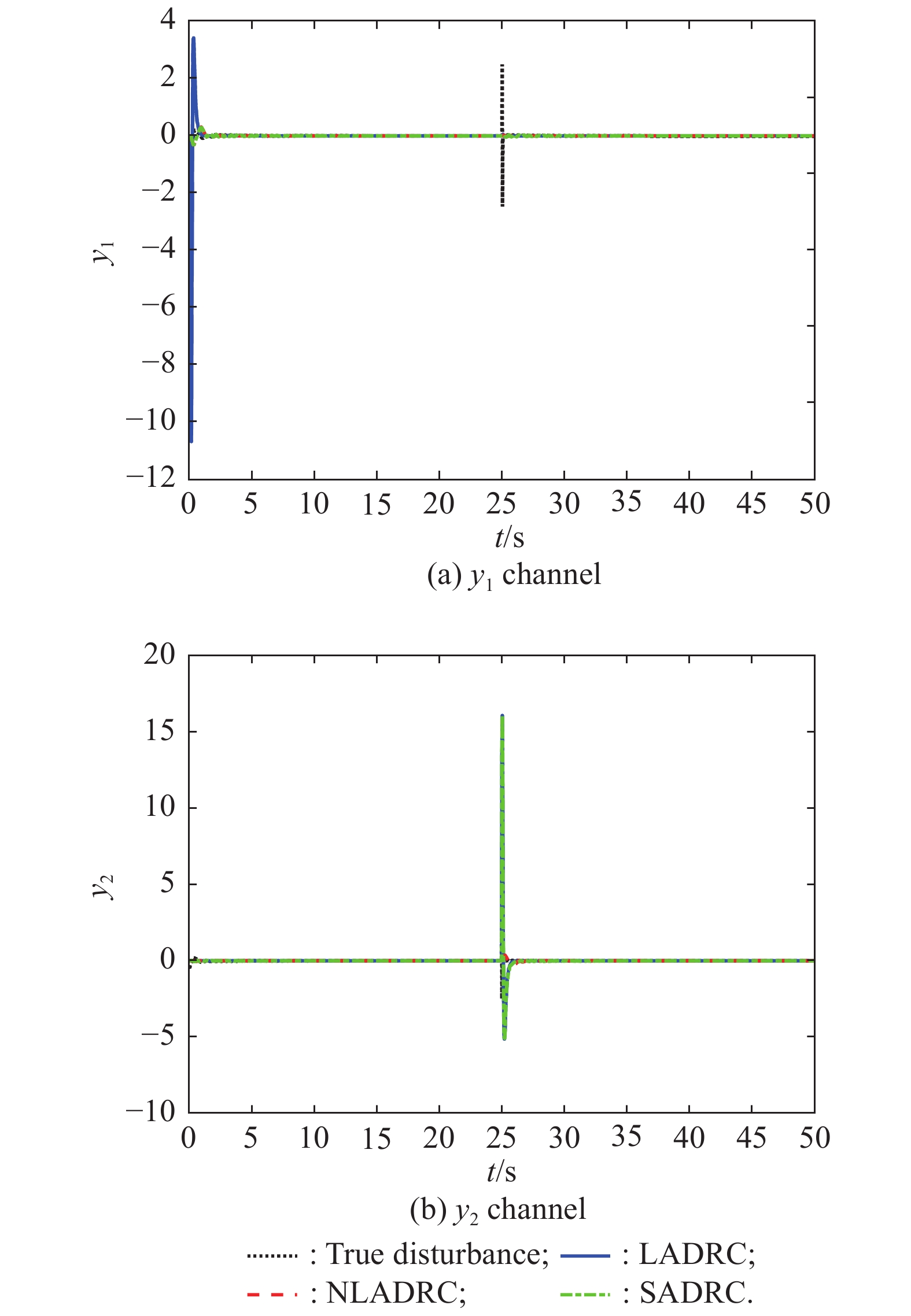
Table 2
Comparison of IAE for the binary distillation column system in anti-disturbance simulation"
| IAE | LADRC | NLADRC | SADRC |
| | 2.66 | 2.73 | 2.73 |
| | 3.07 | 3.16 | 3.10 |
| IAE | 5.73 | 5.89 | 5.83 |

Fig 3
Tracking performance for the binary distillation column system"
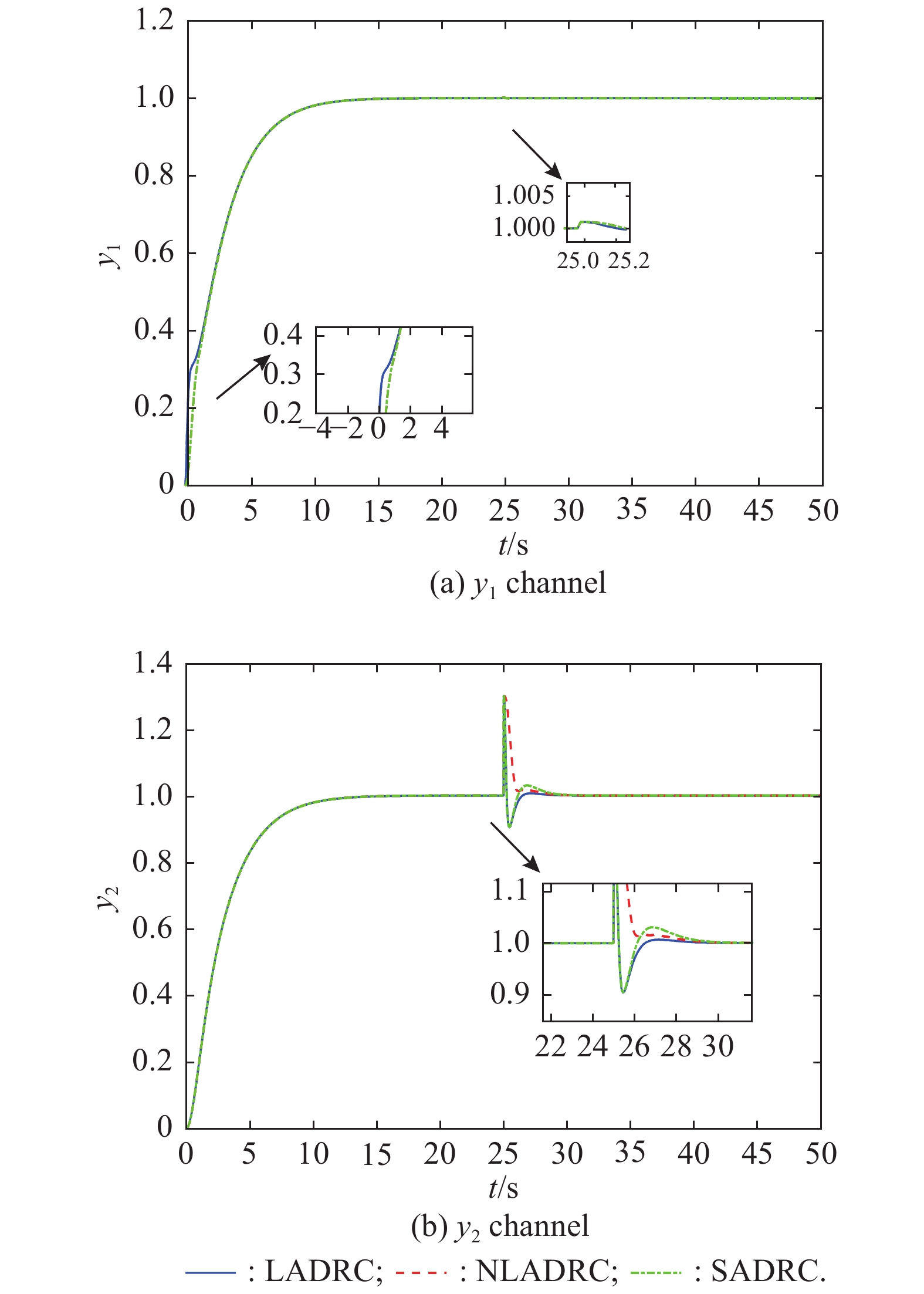

Fig 5
Tracking performance for the binary distillation column system with a different δs and δ "
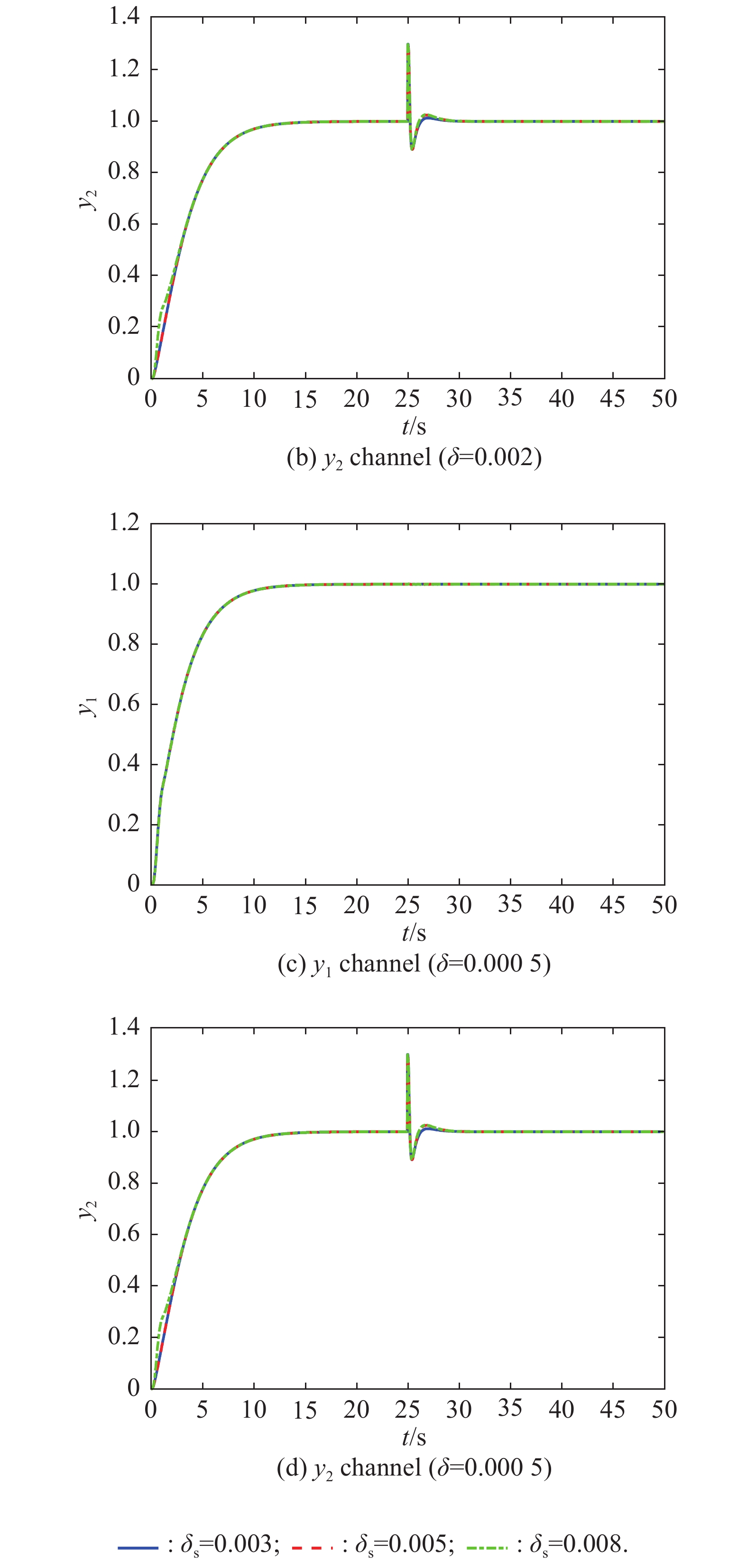

Fig 6
Observed “total disturbance” for the binary distillation column system of each channel with a different δs and δ "
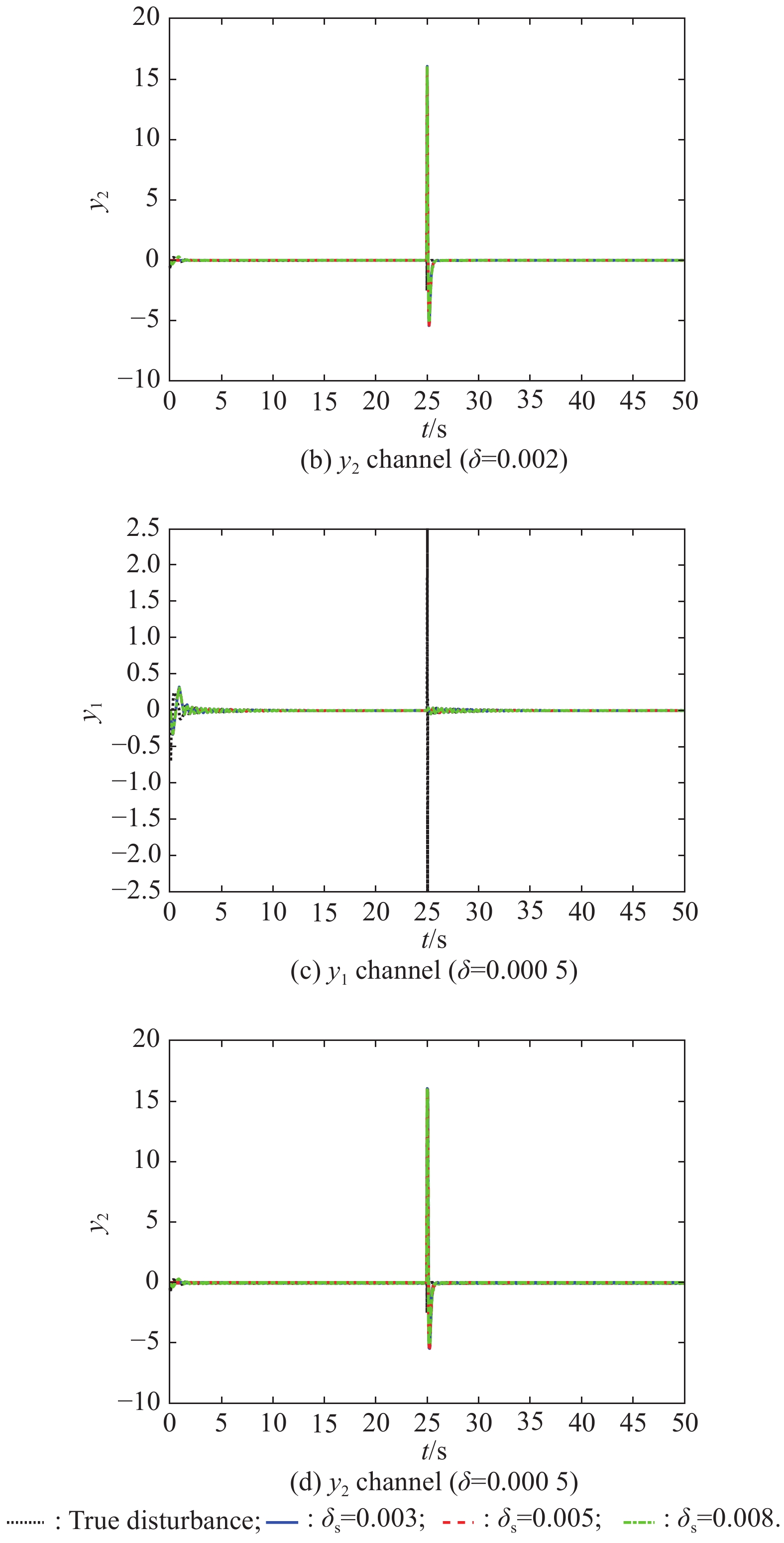
Table 3
Comparison of IAE for the binary distillation column system in anti-disturbance simulation (δ=0.002) "
| IAE | δs=0.003 | δs=0.005 | δs=0.008 |
| | 2.80 | 2.73 | 2.80 |
| | 3.09 | 3.10 | 3.00 |
| IAE | 5.89 | 5.83 | 5.80 |
Table 4
Comparison of IAE for the binary distillation column system in anti-disturbance simulation (δ= 0.0005) "
| IAE | δs=0.003 | δs=0.005 | δs=0.008 |
| | 2.80 | 2.73 | 2.80 |
| | 3.09 | 3.10 | 3.00 |
| IAE | 5.89 | 5.83 | 5.80 |
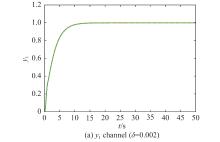
Fig 5
"
Fig 6
"
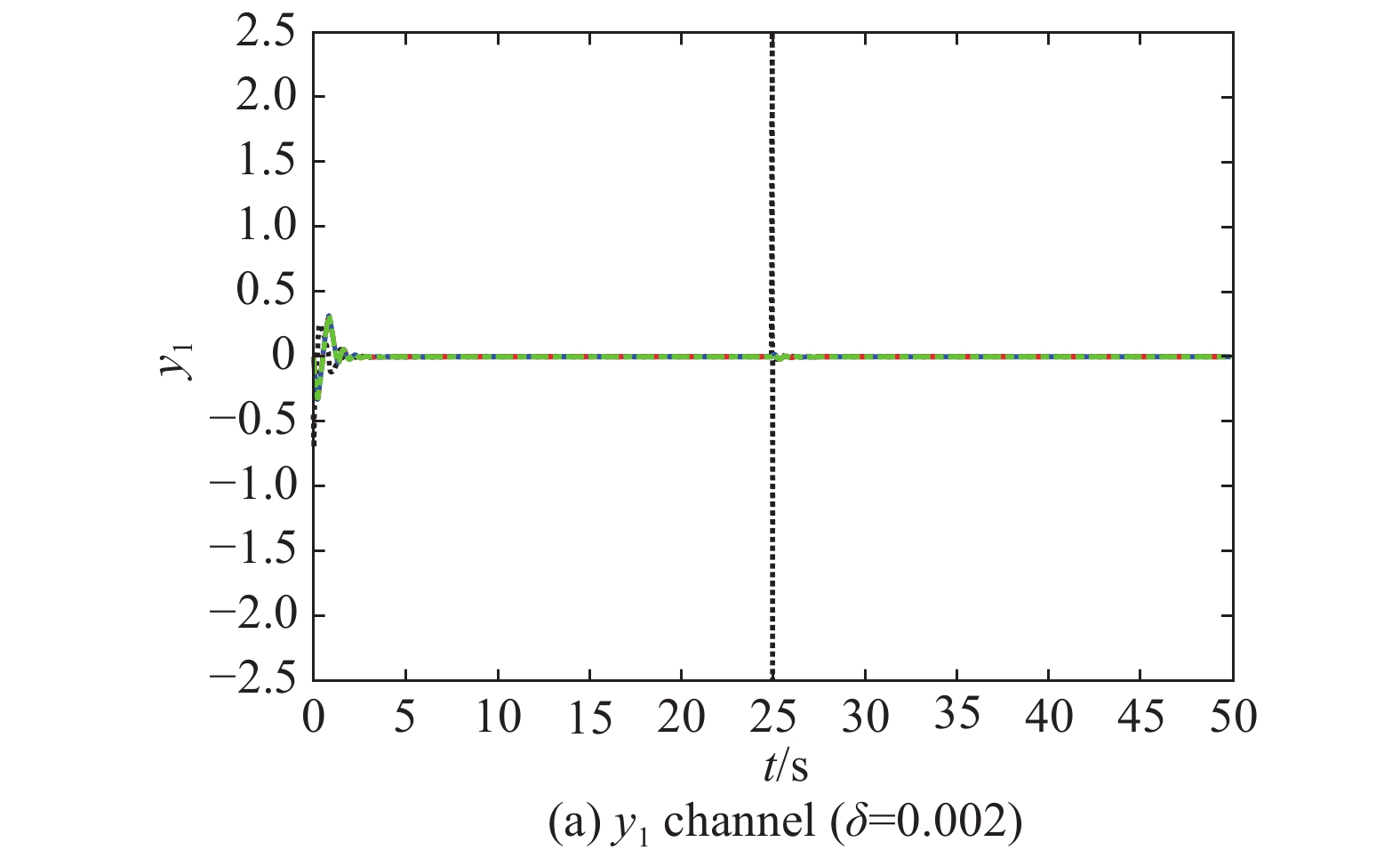
Fig 7
Robustness performance for the binary distillation column system"
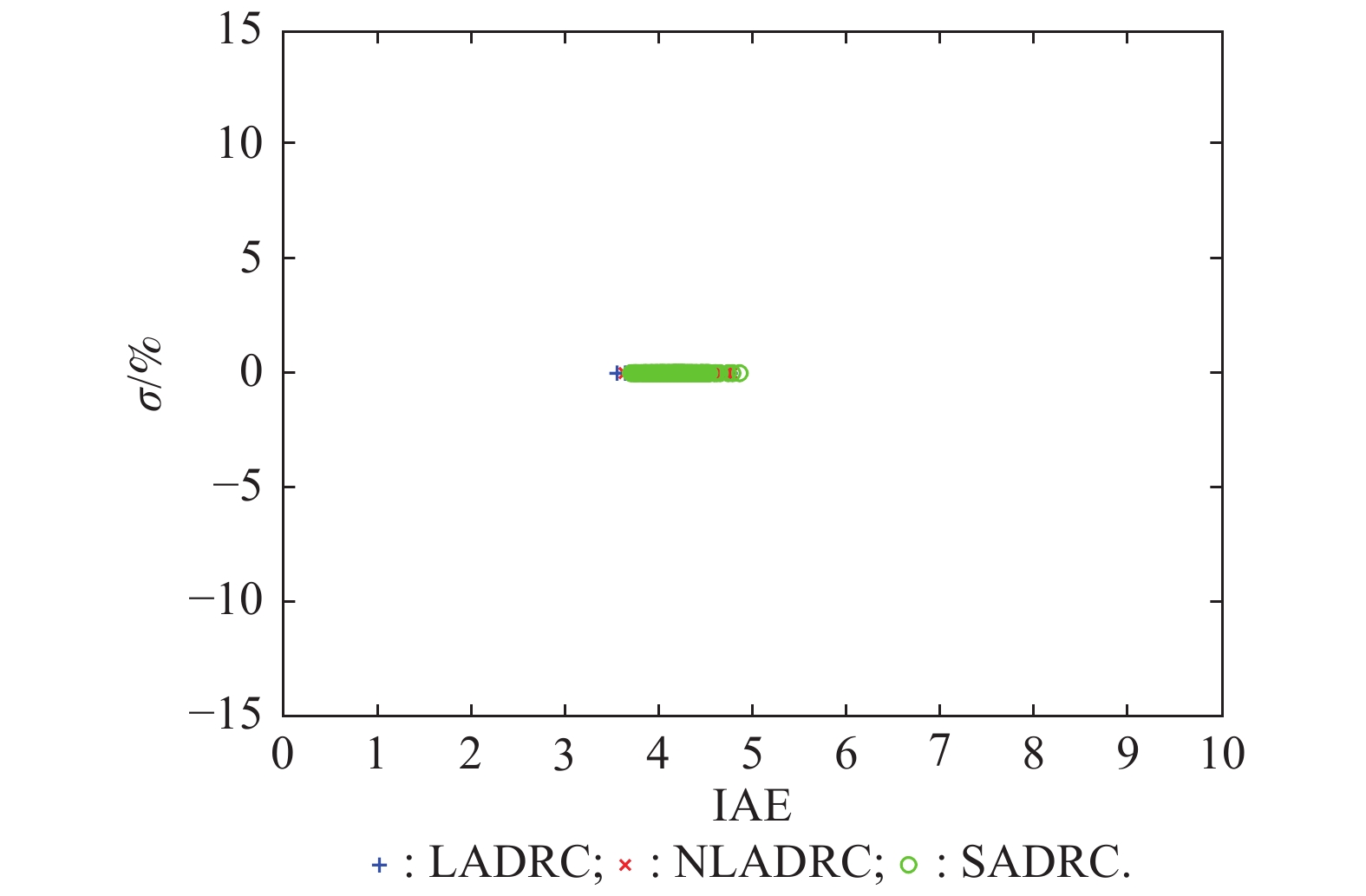
Table 5
Comparison of IAE for the binary distillation column system in robustness simulation"
| Overshoot σ and IAE | LADRC | NLADRC | SADRC |
| | 0 | 0 | 0 |
| | 0 | 0 | 0 |
| σ | 0 | 0 | 0 |
| | 1.60 | 1.65 | 1.62 |
| | 2.33 | 2.47 | 2.42 |
| IAE | 3.93 | 4.12 | 4.04 |
Table 6
Parameters of LADRC, NLADRC, SADRC controllers"
| Controller | | θ channel | ψ channel |
| LADRC[ | wo = 28, wc = 2.8, b0 = 0.424 | wo = 30, wc = 3, b0 = 0.424 | wo = 30, wc = 3.2, b0 = 0.213 |
| NLADRC[ | ESO: α1 = 0.75, α2 = 0.5, α3 = 0.25, β01 = 30, β02 = 300, β03 = 1000, b0 = 0.9, δ = 0.006, NLESF: δ = 3, α1 = 0. 5, α2 = 0.05, β1 = 150, β2 = 120 | ESO: α1 = 0.75, α2 = 0.5, α3 = 0.25, β01 = 30, β02 = 300, β03 = 1000, b0 = 0.9, δ = 0.006, NLESF: δ = 3, α1 = 0. 5, α2 = 0.05, β1 = 150, β2 = 120 | ESO: α1 = 0.75, α2 = 0.5, α3 = 0.25, b0 = 0.06, δ = 0.004, h = 0.0015, β01 = 30, β02 = 300, β03 = 1000, NLESF: δ = 1, α1 = 0. 5, α2 = 0.05, β1 = 300, β2 = 180 |
| SADRC | α1 = 1, α2 = 0.5, α3 = 0.25, wc = 2.8, wo = 30, woN = 15, δs = 0.005, b0 = 0.424, δ = 0.002, β01 = 3woN, β02 = 3woN2/5, β03 = woN3/9 | α1 = 1, α2 = 0.5, α3 = 0.25, wc = 3, wo = 30, woN = 15, δs = 0.005, b0 = 0.424, δ = 0.002, β01 = 3woN, β02 = 3woN2/5, β03 = woN3/9 | α1 = 1, α2 = 0.5, α3 = 0.25, wc = 3.2, wo = 30, woN = 15, δs = 0.005, b0 = 0.033, δ = 0.002, β01 = 3woN, β02 = 3woN2/5, β03 = woN3/9 |

Fig 8
Tracking performance for the 3-DOF Hover system"
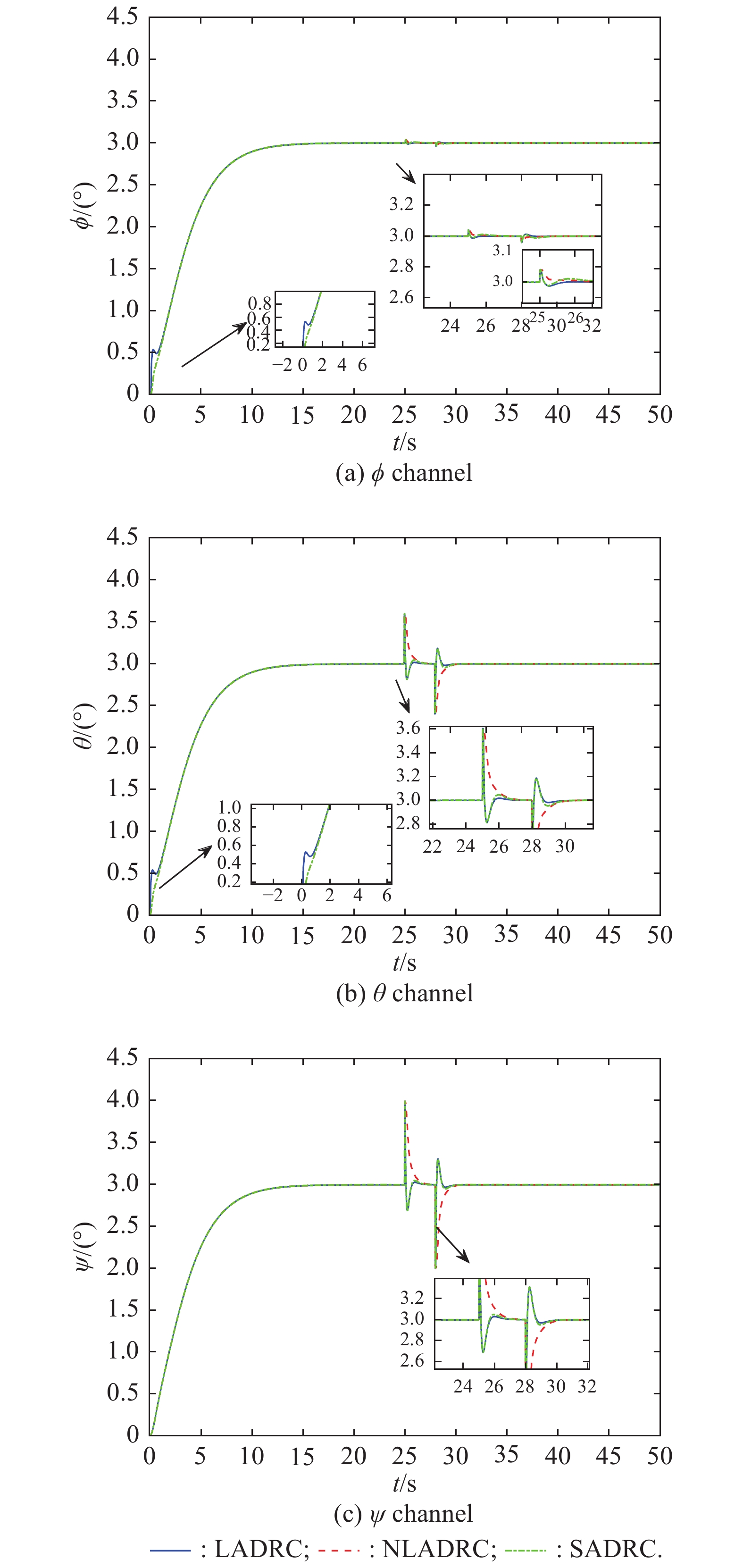

Fig 9
Observed “total disturbance” for the 3-DOF Hover system"
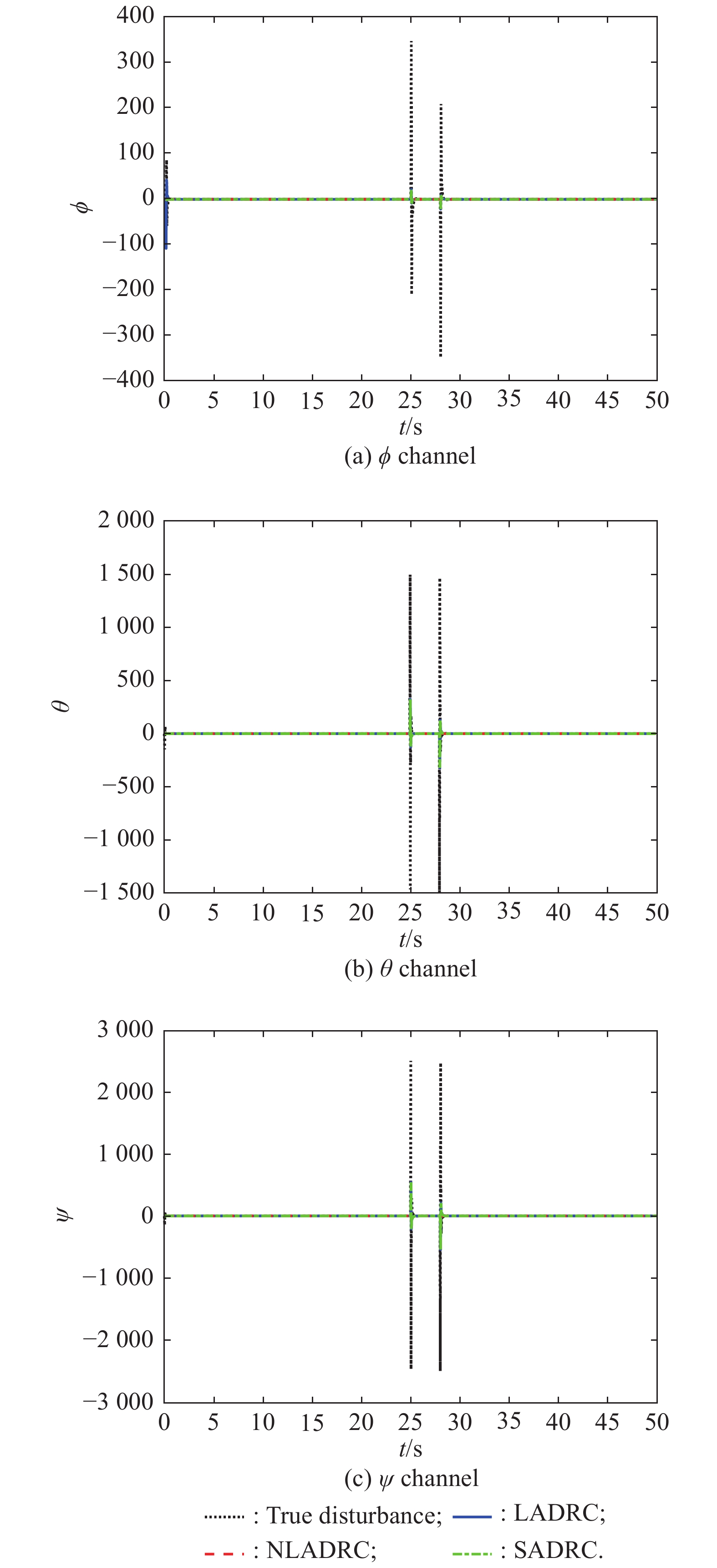
Table 7
Comparison of IAE for the 3-DOF Hover system in anti-disturbance simulation"
| IAE | LADRC | NLADRC | SADRC |
| IAE? | 10.54 | 10.71 | 10.68 |
| IAEθ | 10.61 | 11.13 | 10.84 |
| IAEψ | 13.31 | 13.93 | 13.30 |
| IAE | 34.46 | 35.77 | 34.82 |

Fig 10
Tracking performance for the 3-DOF Hover system with a different δs and δ "
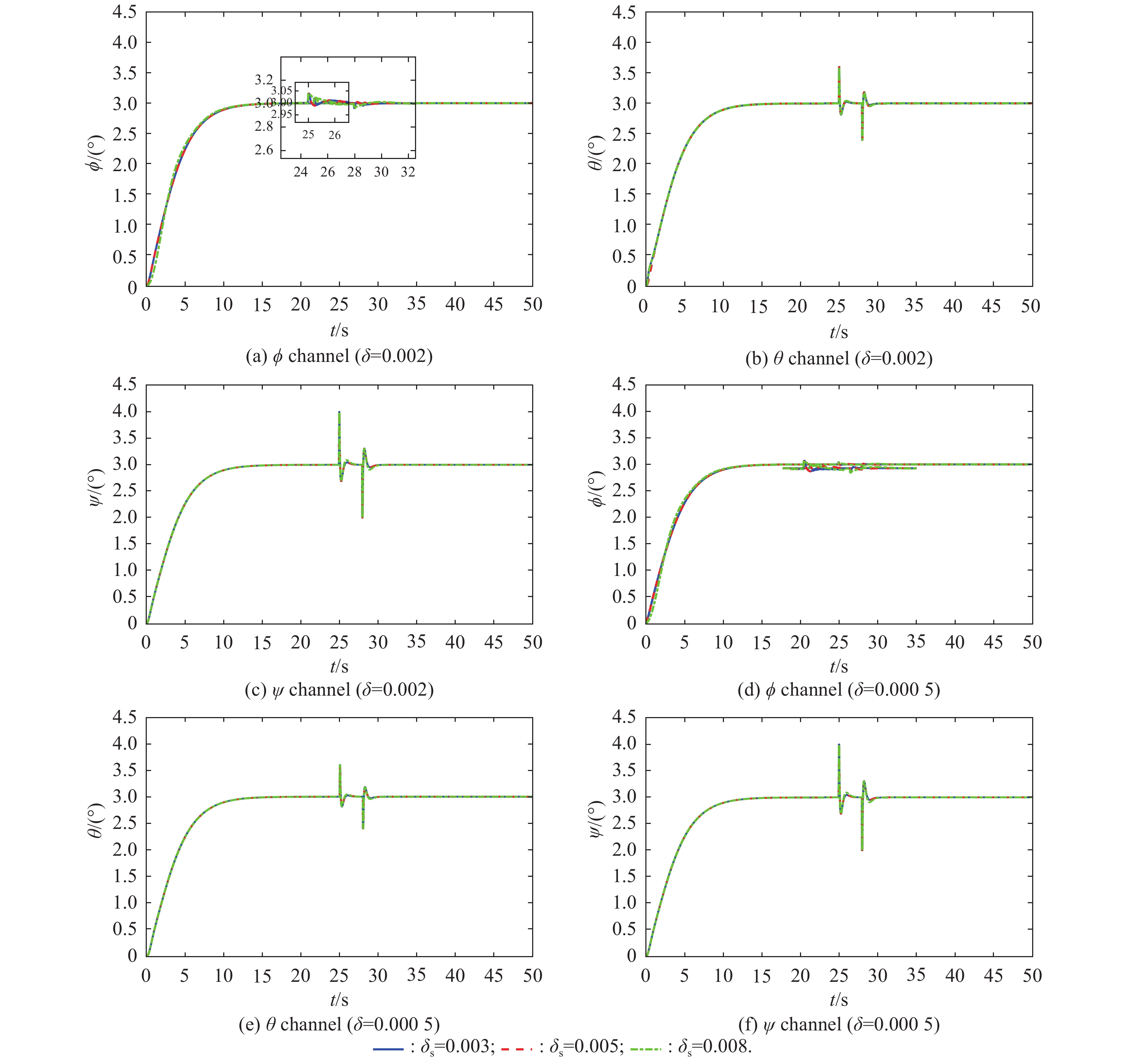
Fig 11
Observed “total disturbance” for the 3-DOF Hover system of each channel with a different δs and δ "
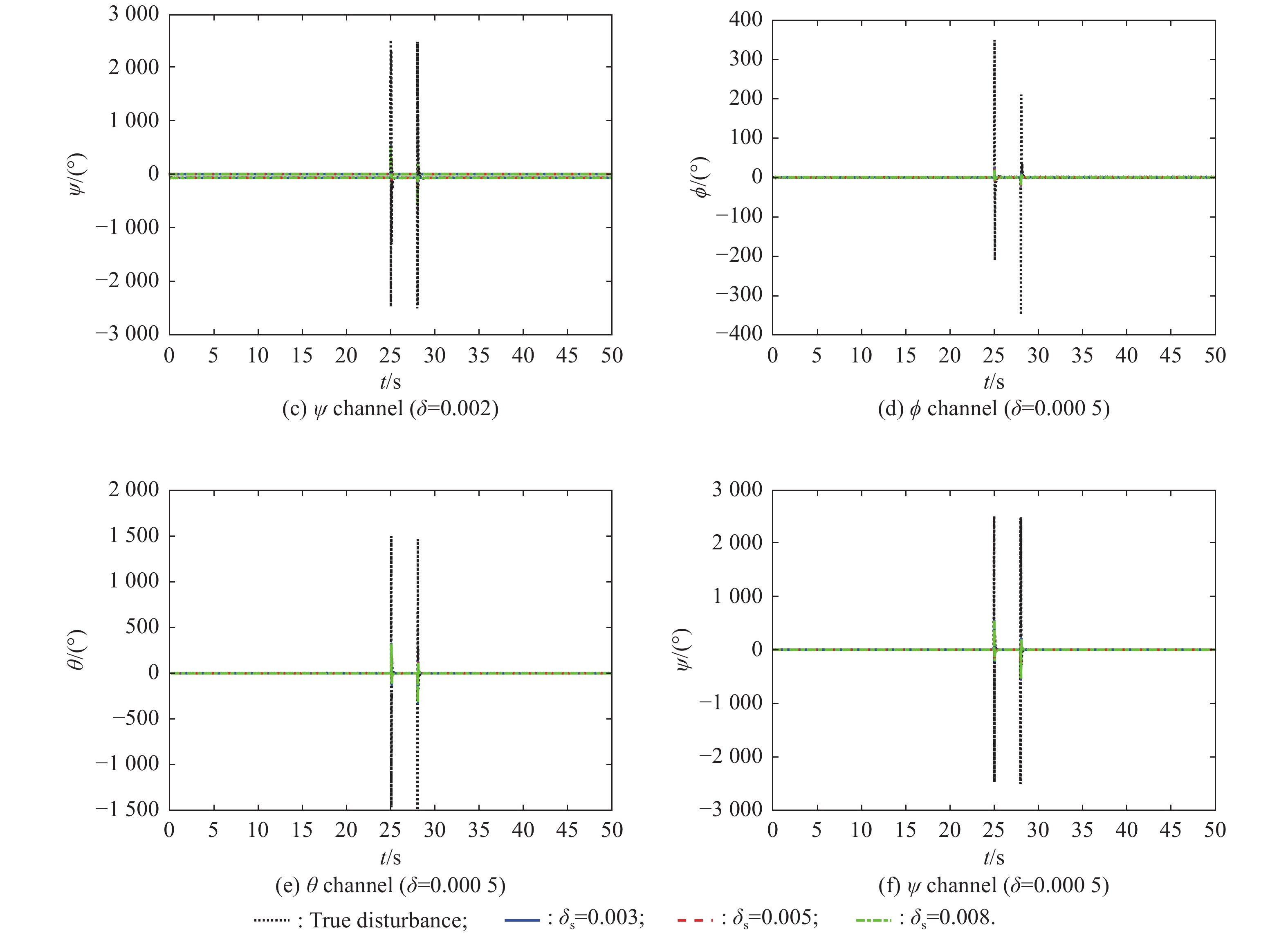
Table 8
Comparison of IAE for the 3-DOF Hover system in anti-disturbance simulation (δ= 0.002) "
| IAE | δs=0.003 | δs=0.005 | δs=0.008 |
| IAE? | 10.68 | 10.68 | 10.70 |
| IAEθ | 10.81 | 10.84 | 10.82 |
| IAEψ | 13.30 | 13.30 | 13.25 |
| IAE | 34.79 | 34.82 | 34.77 |
Table 9
Comparison of IAE for the 3-DOF Hover system in anti-disturbance simulation (δ= 0.0005) "
| IAE | δs=0.003 | δs=0.005 | δs=0.008 |
| IAE? | 10.68 | 10.69 | 10.70 |
| IAEθ | 10.82 | 10.85 | 10.83 |
| IAEψ | 13.31 | 13.31 | 13.29 |
| IAE | 34.81 | 34.85 | 34.82 |

Fig 12
Robustness performance for the 3-DOF Hover system"
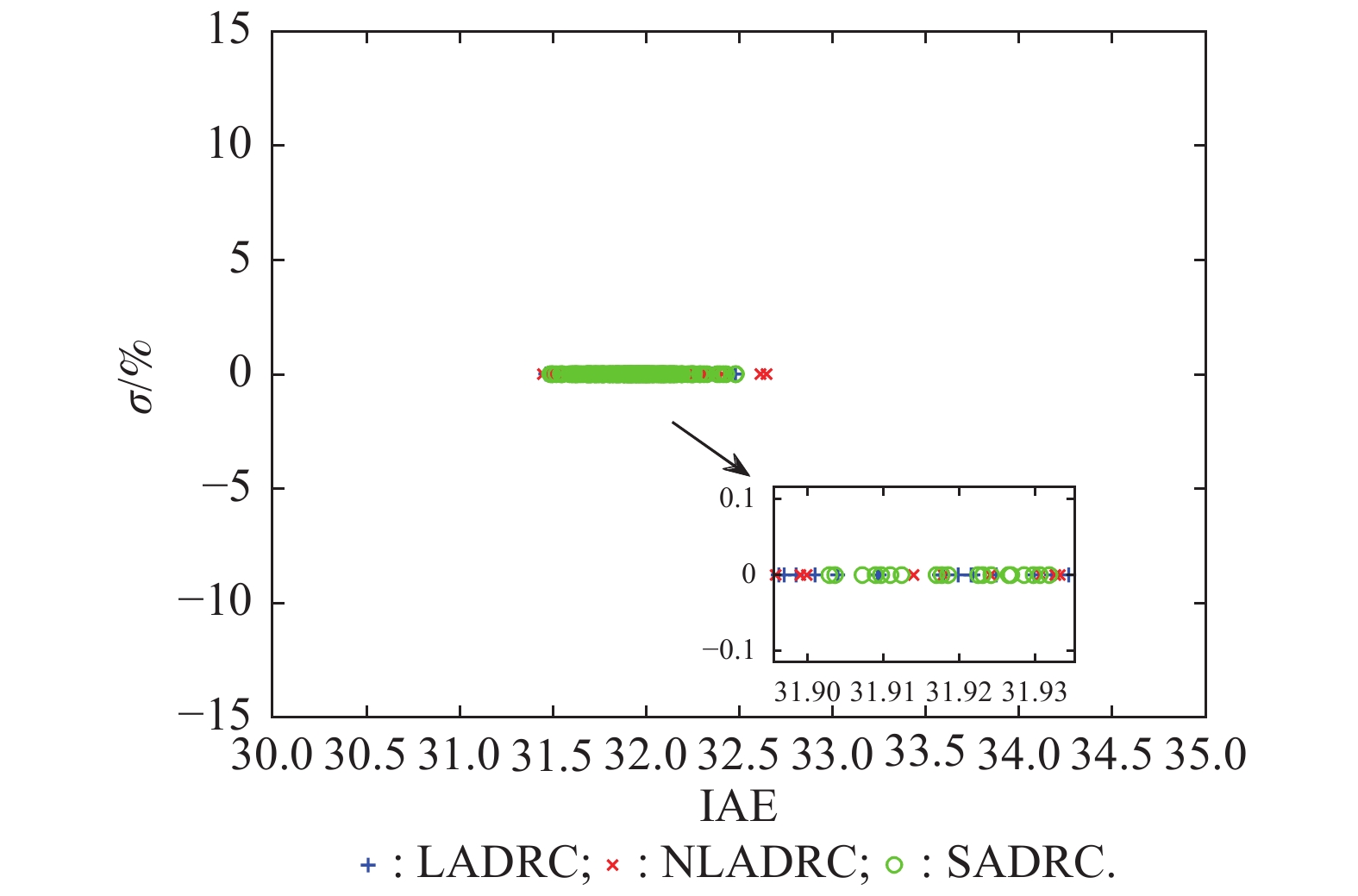
Table 10
Comparison of IAE for the 3-DOF Hover system"
| Overshoot σ and IAE | LADRC | NLADRC | SADRC |
| σ? | 0 | 0 | 0 |
| σθ | 0 | 0 | 0 |
| σψ | 0 | 0 | 0 |
| σ | 0 | 0 | 0 |
| IAE? | 10.60 | 10.85 | 10.73 |
| IAEθ | 10.62 | 10.81 | 10.71 |
| IAEψ | 12.42 | 13.86 | 13.36 |
| IAE | 33.64 | 35.52 | 34.80 |
| 1 | HAN J Q, WANG W Nonlinear tracking-differentiator. Journal of System and Mathematical Science, 1994, 14 (3): 177- 183. |
| 2 | HAN J Q, YUAN L L The discrete form of tracking-differentiator. Journal of System and Mathematical Science, 1999, 19 (3): 268- 273. |
| 3 | HAN J Q Nonlinear state error feedback control law—NLSEF. Control and Decision, 1995, 10 (3): 221- 226. |
| 4 | HAN J Q The “extended state observer” of a class of uncertain systems. Control and Decision, 1995, 10 (1): 85- 88. |
| 5 | HAN J Q Auto-disturbance rejection controller and it’s applications. Control and Decision, 1998, 13 (1): 19- 23. |
| 6 | HAN J Q Linear and nonlinear in feedback systems. Control and Decision, 1988, 3 (2): 27- 32. |
| 7 | HAN J Q Control theory, is it a model analysis approach or a direct control approach. Journal of System and Mathematical Science, 1989, 9 (4): 328- 335. |
| 8 |
ZHAO Z L, GUO B Z On convergence of nonlinear active disturbance rejection control for a class of nonlinear systems. Journal of Dynamical and Control Systems, 2016, 22 (2): 385- 412.
doi: 10.1007/s10883-015-9304-5 |
| 9 |
GUO B Z, ZHAO Z L On convergence of the nonlinear active disturbance rejection control for MIMO systems. Journal on Control and Optimization, 2013, 51 (2): 1727- 1757.
doi: 10.1137/110856824 |
| 10 | ZHAO Z L, GUO B Z Active disturbance rejection control approach to stabilization of lower triangular systems with uncertainty. International Journal of Robust and Nonlinear Control, 2015, 26 (11): 2314- 2337. |
| 11 |
WU D, CHEN K Frequency-domain analysis of nonlinear active disturbance rejection control via the describing function method. IEEE Trans. on Industrial Electronics, 2013, 60 (9): 3906- 3914.
doi: 10.1109/TIE.2012.2203777 |
| 12 |
WU D, CHEN K Limit cycle analysis of active disturbance rejection control system with two nonlinearities. ISA Transactions, 2014, 53 (4): 947- 954.
doi: 10.1016/j.isatra.2014.03.001 |
| 13 | LI J, QI X H, XIA Y Q, et al Frequency domain stability analysis of nonlinear active disturbance rejection control system. ISA Transactions, 2015, 56 (5): 188- 195. |
| 14 | LI J, XIA Y Q, QI X H, et al Absolute stability analysis of nonlinear active disturbance rejection control for single-input-single-output systems via the circle criterion method. IET Control Theory & Applications, 2015, 9 (15): 2320- 2329. |
| 15 | QI X H, LI J, XIA Y Q, et al On the robust stability of active disturbance rejection control for SISO systems. Circuits, Systems, and Signal Processing, 2017, 35 (1): 65- 81. |
| 16 |
LI J, XIA Y Q, QI X H Robust absolute stability analysis for interval nonlinear active disturbance rejection based control system. ISA Transactions, 2017, 69, 122- 130.
doi: 10.1016/j.isatra.2017.04.017 |
| 17 | WAN H. Stability and application for active-disturbance-rejection-controller. Beijing: Academy of Mathematics and Systems Science, 2001. (in Chinese) |
| 18 | LI J, QI X H, XIA Y Q, et al. On asymptotic stability for nonlinear ADRC based control system with application to the ball-beam problem. Proc. of American Control Conference, 2016: 4725–4730. |
| 19 | GAO Z Q. Scaling and bandwidth—parameterization based controller tuning. Proc. of American Control Conference, 2003: 4989–4996. |
| 20 | LI R H, CAO J H, LI T S Active disturbance rejection control design and parameters configuration for ship steering with wave disturbance. Control Theory & Applications, 2018, 35 (11): 1601- 1609. |
| 21 | YOO D, STEPHEN S T, GAO Z. On convergence of the linear ex-tended state observer. Proc. of the IEEE International Symposium on Intelligent Control, 2006: 1645–1650. |
| 22 | YANG X, HUANG Y. Capability of extended state observer for estimating uncertainties. Proc. of American Control Conference, 2009: 3700 – 3705. |
| 23 | SHAO L W, LIAO X Z, XIA Y Q, et al Stability analysis and synthesis of third order extended state observer. Information and Control, 2008, 37 (2): 135- 139. |
| 24 |
YOO D, YAU S T, GAO Z Optimal fast tracking observer band-width of the linear extended state observer. International Journal of Control, 2007, 80 (1): 102- 111.
doi: 10.1080/00207170600936555 |
| 25 | HUANG Y, WANG J, SHI D. On convergence of extended state observers for discrete-time nonlinear systems. Proc. of the 34th Chinese Control Conference, 2015: 551 – 556. |
| 26 | ZHENG Q, GAO L Q, GAO Z. On stability analysis of active disturbance rejection control for nonlinear time-varying plants with unknown dynamics. Proc. of the 46th IEEE Conference on Decision and Control, 2007: 3501 – 3506. |
| 27 | CHEN Z Q, SUN M W, YANG R G On stability analysis of linear disturbance rejection control. Acta Automatica Sinica, 2013, 39 (5): 574- 580. |
| 28 | XUE W, HUANG Y. Comparison of the DOB based control, a special kind of PID control and ADRC. Proc. of American Control Conference, 2011: 4373 – 4379. |
| 29 | XUE W, HUANG Y. The active disturbance rejection control for a class of MIMO blocklower-triangular system. Proc. of the 31st Chinese Control Conference, 2011: 6362 – 6367. |
| 30 | XUE W, HUANG Y. On performance analysis of ADRC for non-linear uncertain systems with unknown dynamics and discontinuous disturbances. Proc. of the 32nd Chinese Control Conference, 2013: 465 – 470. |
| 31 |
LI J, XIA Y Q, QI X, et al On the necessity, scheme and basis of the linear-nonlinear switching in active disturbance rejection control. IEEE Trans. on Industrial Electronics, 2017, 64 (2): 1425- 1435.
doi: 10.1109/TIE.2016.2611573 |
| 32 | LI J, QI X H, XIA Y Q, et al On linear/nonlinear active disturbance rejection control. Acta Automatica Sinica, 2016, 42 (2): 202- 212. |
| 33 | MOKHTARI R M, BRAHAM A C, CHERKI B Extended state observer based control for coaxial-rotor UAV. ISA Transactions, 2015, 11 (24): 1- 14. |
| 34 | SU S X, YANG H Z Active-disturbance-rejection dynamic nonlinear decoupling control for a class of multivariable systems. CIESC Journal, 2010, 61 (8): 1949- 1954. |
| 35 | LIU Q, LI D, TIAN W. Design of multi-loop ADRC controllers based on the effective open-loop transfer function method. Proc. of the 33rd Chinese Control Conference, 2014: 3649 – 3654. |
| 36 | LIU M, JI Y H, LI J F, et al Active disturbance rejection attitude control for quadrotor aircraft. Computer Simulation, 2016, 33 (3): 711- 75. |
| 37 | LI Y, CHEN Z Q, SUN M W, et al Attitude control for quadrotor helicopter based on discrete-time active disturbance rejection control. Control Theory & Applications, 2015, 32 (11): 1470- 1477. |
| [1] | Junjie LIU, Mingwei SUN, Zengqiang CHEN, Qinglin SUN. High AOA decoupling control for aircraft based on ADRC [J]. Journal of Systems Engineering and Electronics, 2020, 31(2): 393-402. |
| [2] | Songtao Zhang, Xiaowei Zhao, and Jiantong Zhang. Stability and stabilization of discrete T-S fuzzy time-delay system based on maximal overlapped-rules group [J]. Systems Engineering and Electronics, 2016, 27(1): 201-. |
| [3] | Zhichao Zhou, Yang Xiao, and Dong Wang. Stability analysis of wireless network with improved fluid model [J]. Systems Engineering and Electronics, 2015, 26(6): 1149-1158. |
| [4] | Pan Xiong, Feng Wang, Xibin Cao, and Guangren Duan. Robust D-stability LMI conditions of matrix polytopes via affine parameter-dependent Lyapunov functions [J]. Journal of Systems Engineering and Electronics, 2013, 24(6): 984-991. |
| [5] | Lian Guangyao, Huang Kaoli, Chen Jianhui & Wei Zhonglin. Study of testability measurement method for equipment based on Bayesian network model [J]. Journal of Systems Engineering and Electronics, 2009, 20(5): 1017-1023. |
| [6] | Shi Wuxi. Indirect adaptive fuzzy control for a class of nonlinear discrete-time systems [J]. Journal of Systems Engineering and Electronics, 2008, 19(6): 1203-1207. |
| [7] | Lu Hongqian, Huang Xianlin, Gao X Z, Ban Xiaojun & Yin Hang. Stability analysis of the simplest Takagi-Sugeno fuzzy control system using circle criterion [J]. Journal of Systems Engineering and Electronics, 2007, 18(2): 311-319. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||