
Journal of Systems Engineering and Electronics ›› 2021, Vol. 32 ›› Issue (4): 841-853.doi: 10.23919/JSEE.2021.000073
• ELECTRONICS TECHNOLOGY • Previous Articles Next Articles
Tao YE1,*( ), Zongyang ZHAO1(), Jun ZHANG1(), Xinghua CHAI2(), Fuqiang ZHOU3()
), Zongyang ZHAO1(), Jun ZHANG1(), Xinghua CHAI2(), Fuqiang ZHOU3()
Received:2021-02-19
Online:2021-08-18
Published:2021-09-30
Contact:
Tao YE
E-mail:ayetao198715@163.com;303616426@qq.com;973974045@qq.com;cxh88_88@163.com;zfq@buaa.edu.cn
About author:Supported by:Tao YE, Zongyang ZHAO, Jun ZHANG, Xinghua CHAI, Fuqiang ZHOU. Low-altitude small-sized object detection using lightweight feature-enhanced convolutional neural network[J]. Journal of Systems Engineering and Electronics, 2021, 32(4): 841-853.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks

Fig 1
LSM"
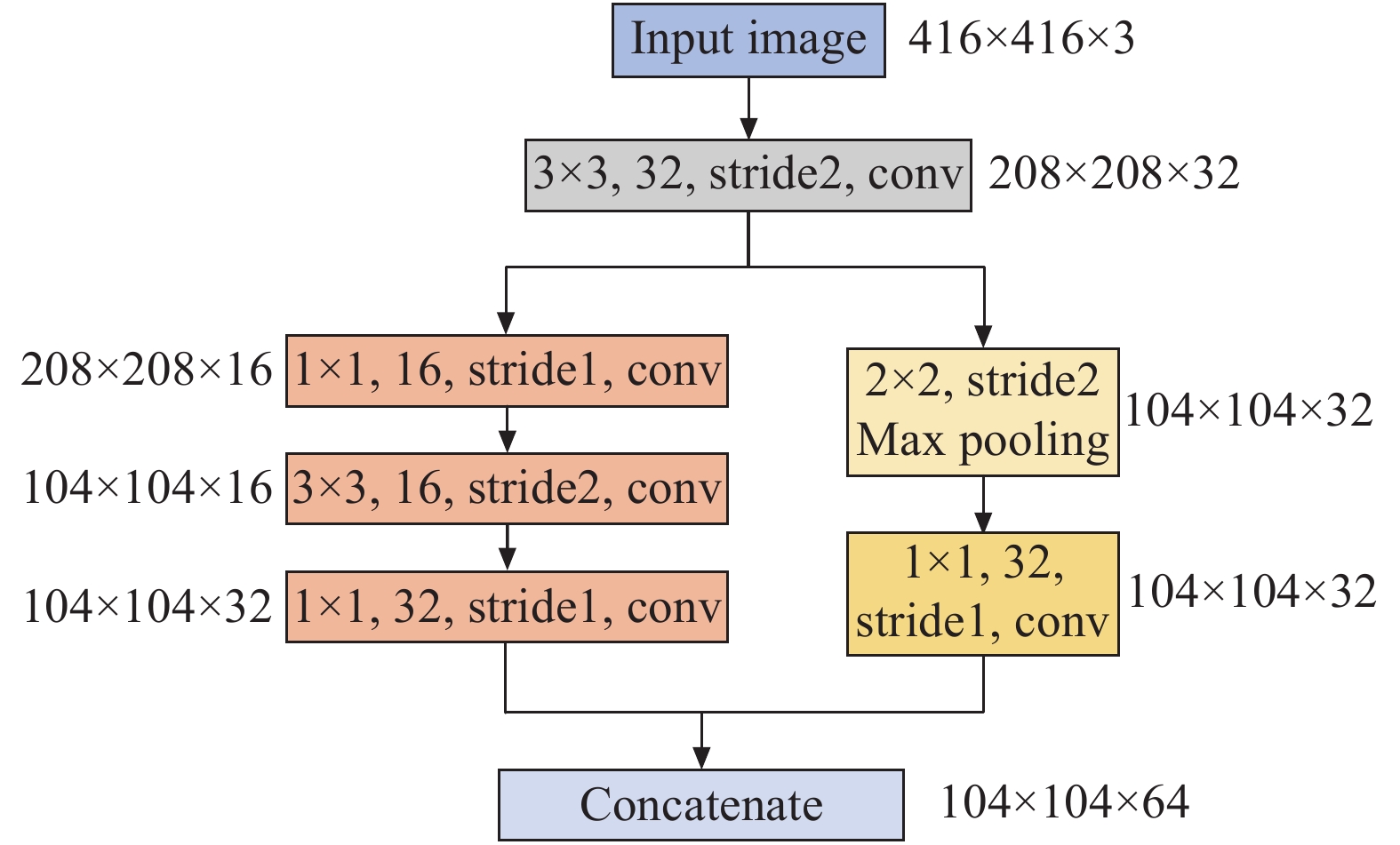
Fig 2
EFM"
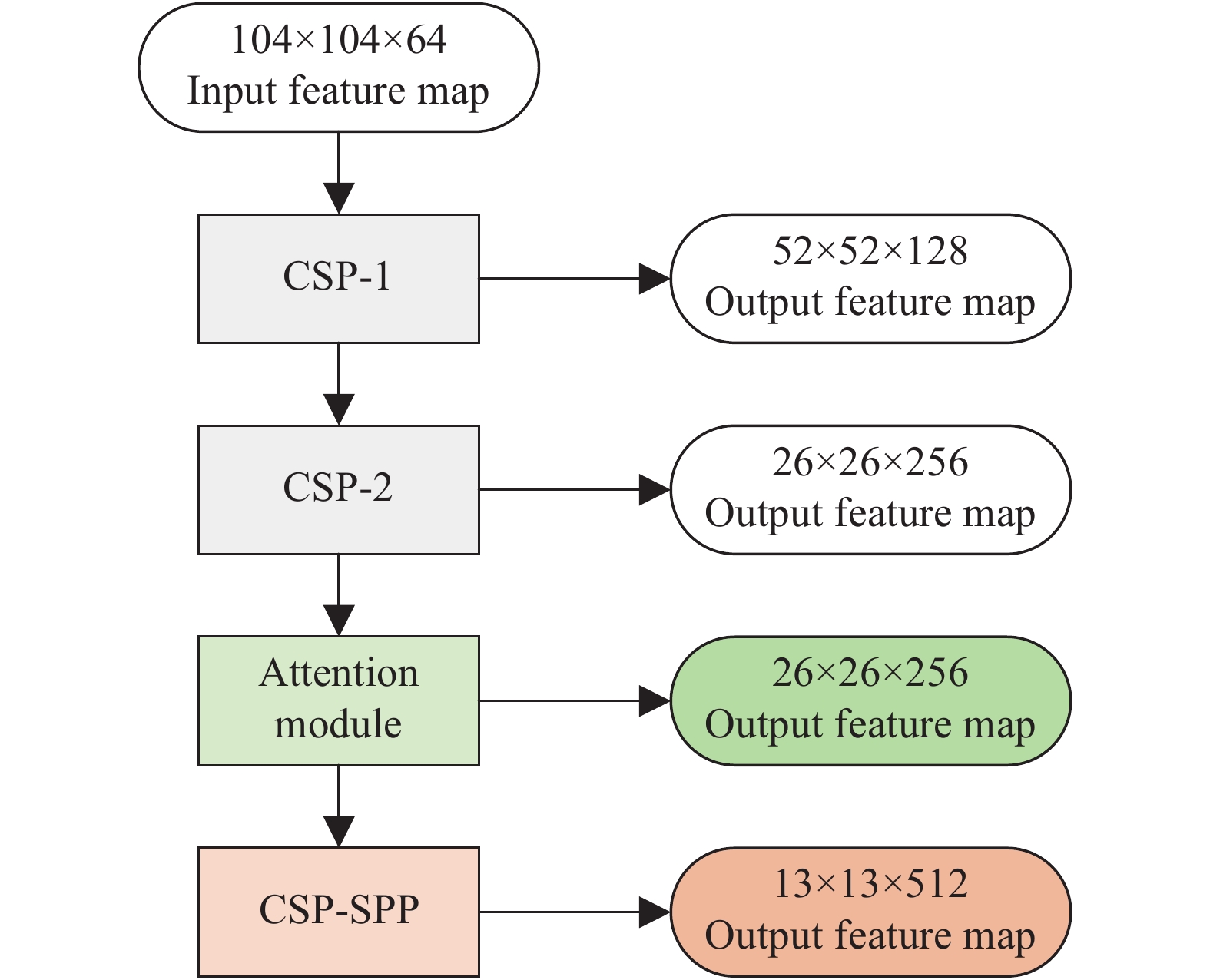
Fig 3
Frame of CSP-1 and CSP-2"
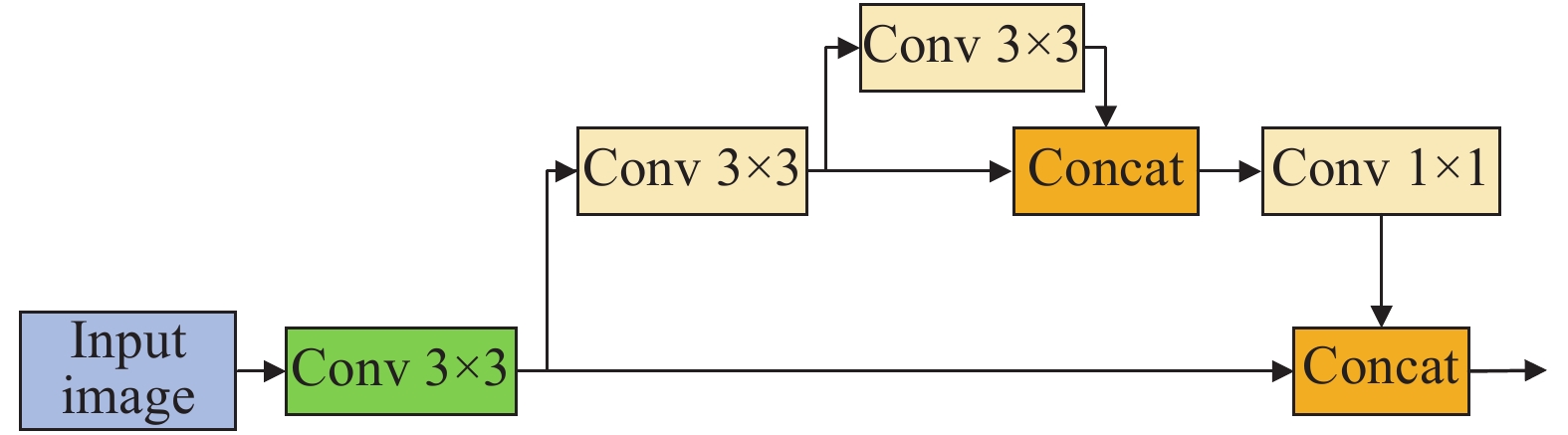
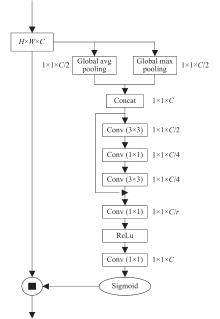
Fig 4
Attention module"
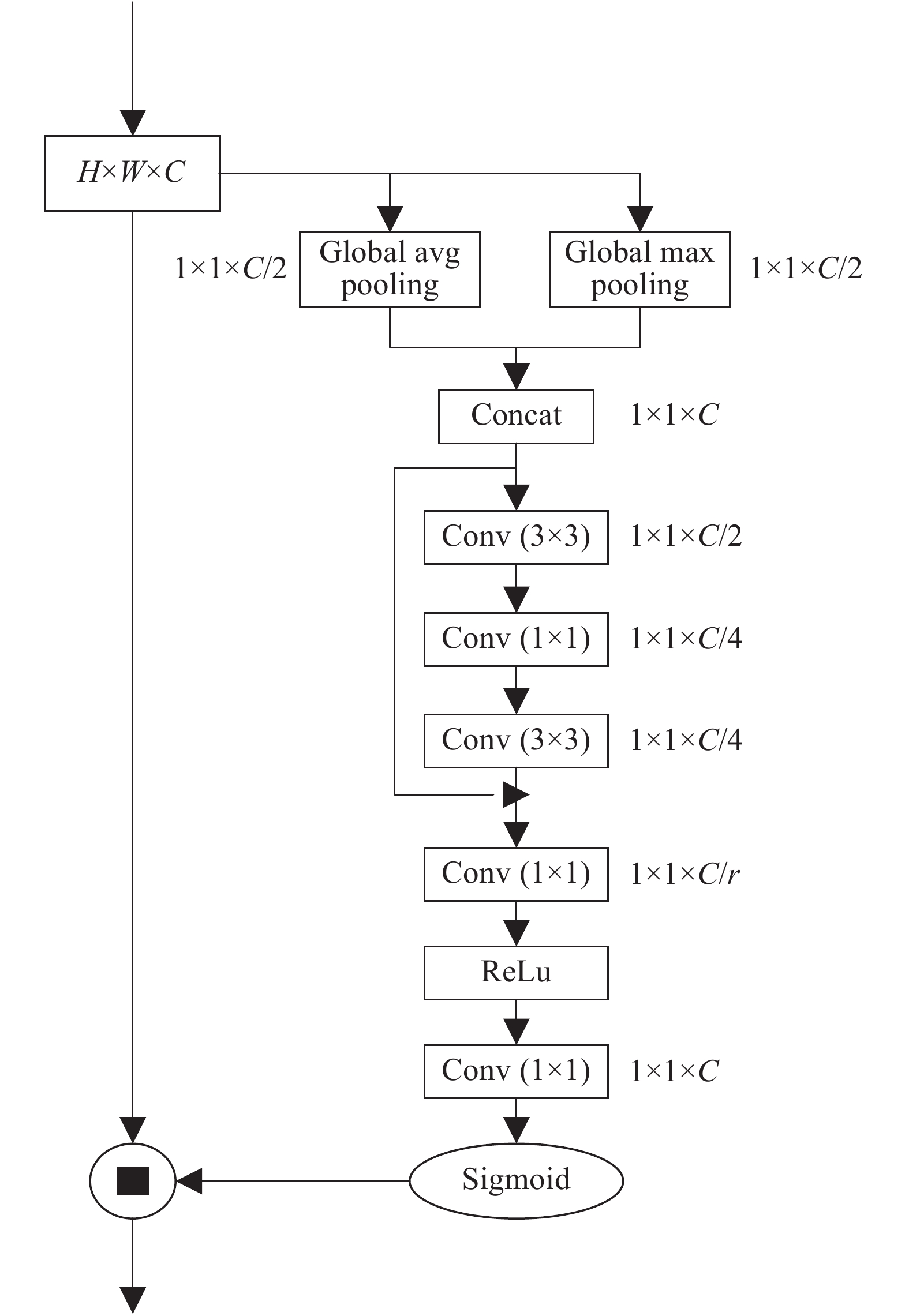

Fig 5
Structure of CSP-SPP"
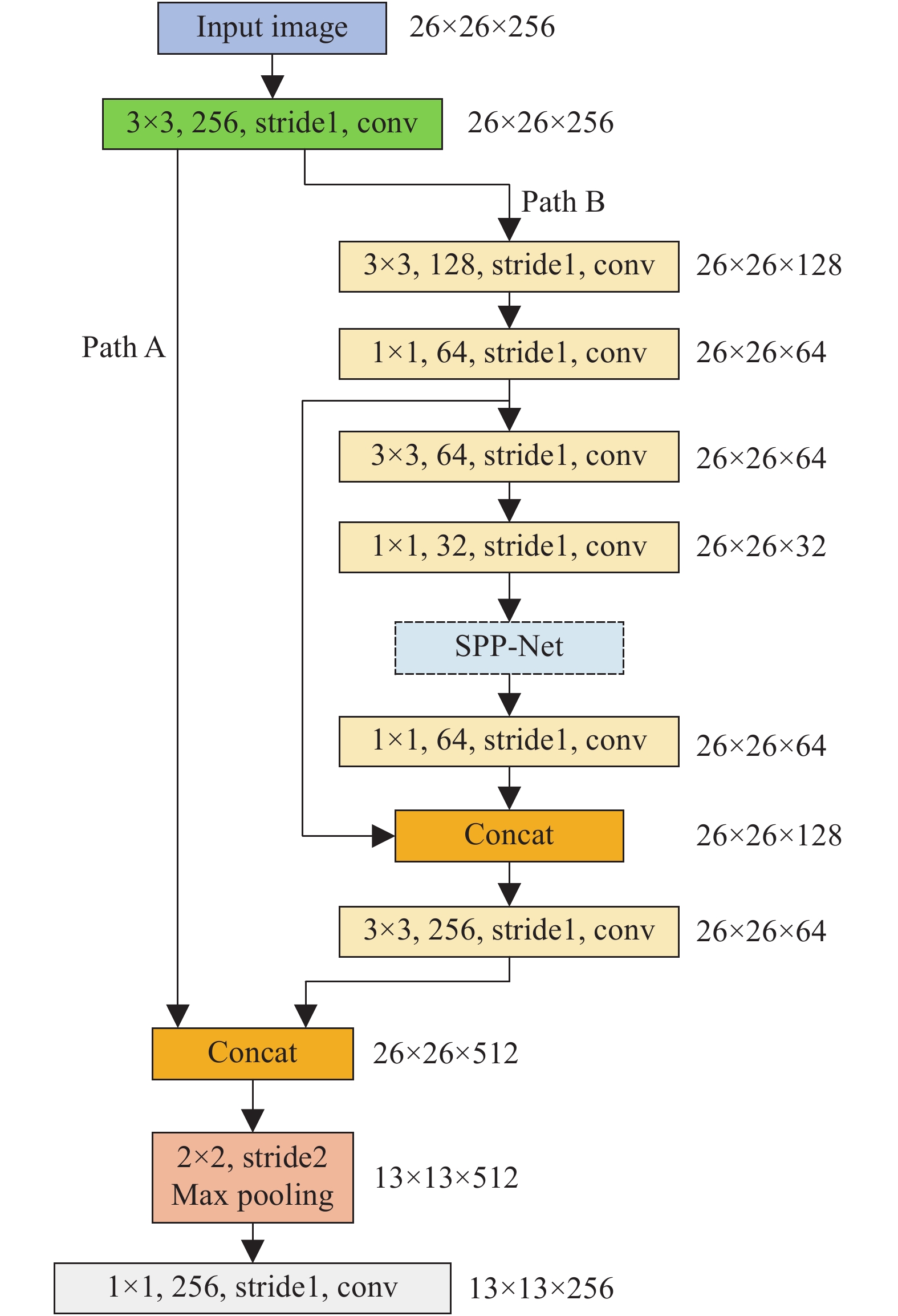
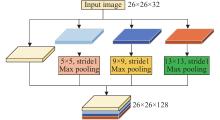
Fig 6
Structure of SPP-Net"
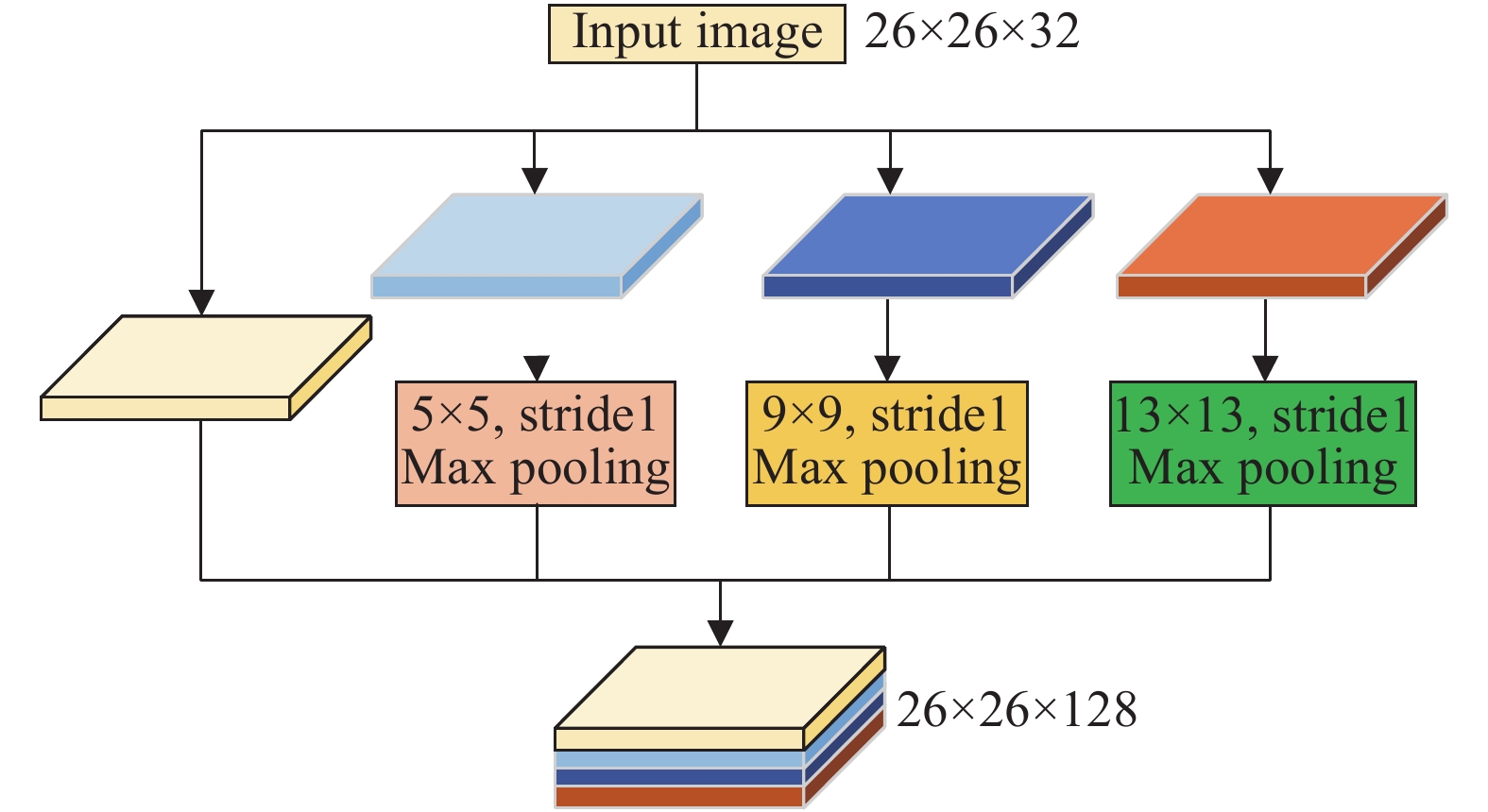
Fig 7
LNB"
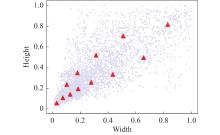
Fig 8
Bounding and anchor distribution"
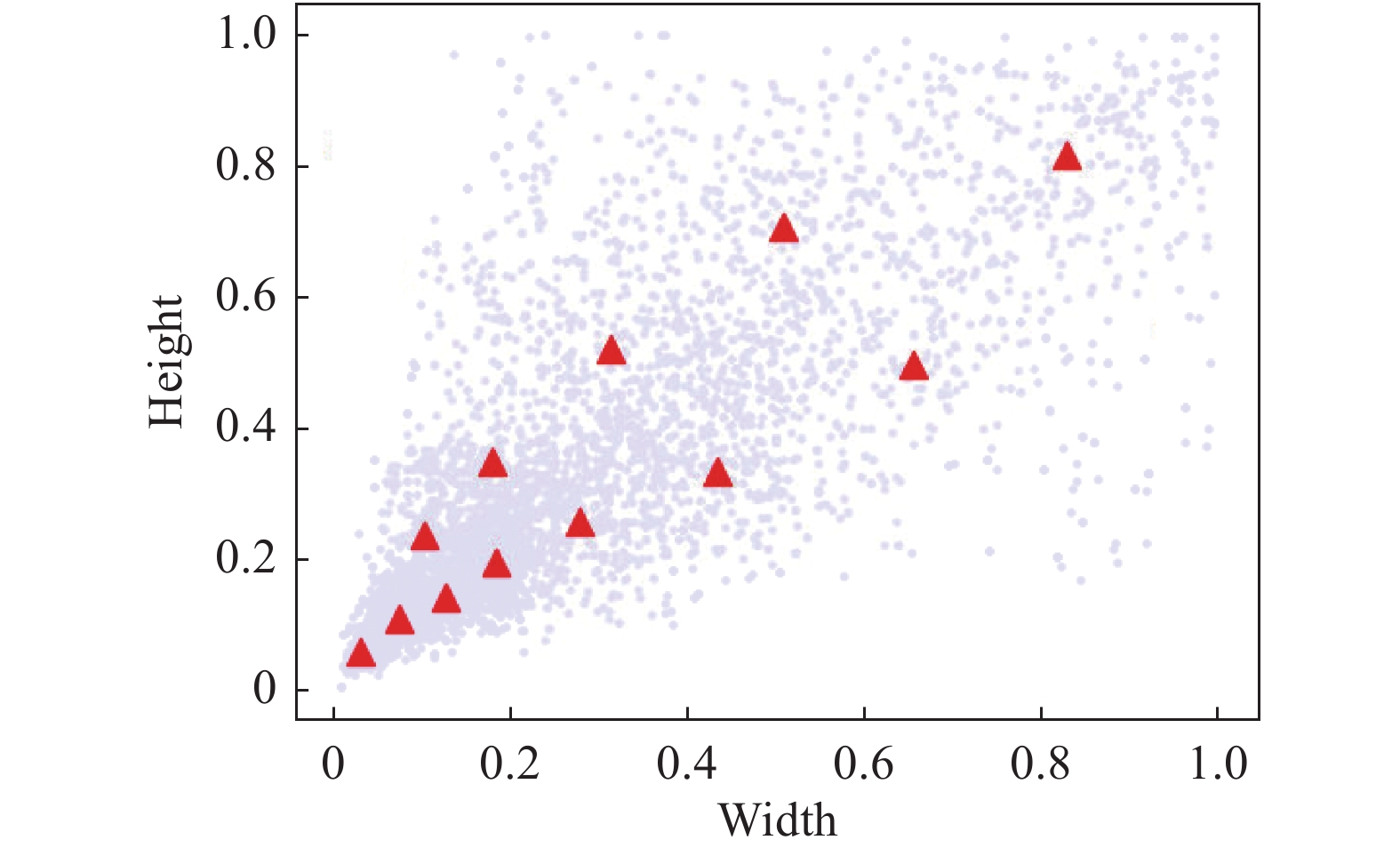
Table 1
Specific size and distribution of anchor boxes"
| Feature-map size | Receptive field size | Anchor box size |
| 13 × 13 | 32 × 32 | 320, 321, 196, 237, 155, 128 |
| 26 × 26 | 16 × 16 | 98, 186, 82, 86, 55, 126 |
| 52 × 52 | 8 × 8 | 56, 64, 33, 48, 13, 26 |

Fig 9
Architecture of the LSL-Net"
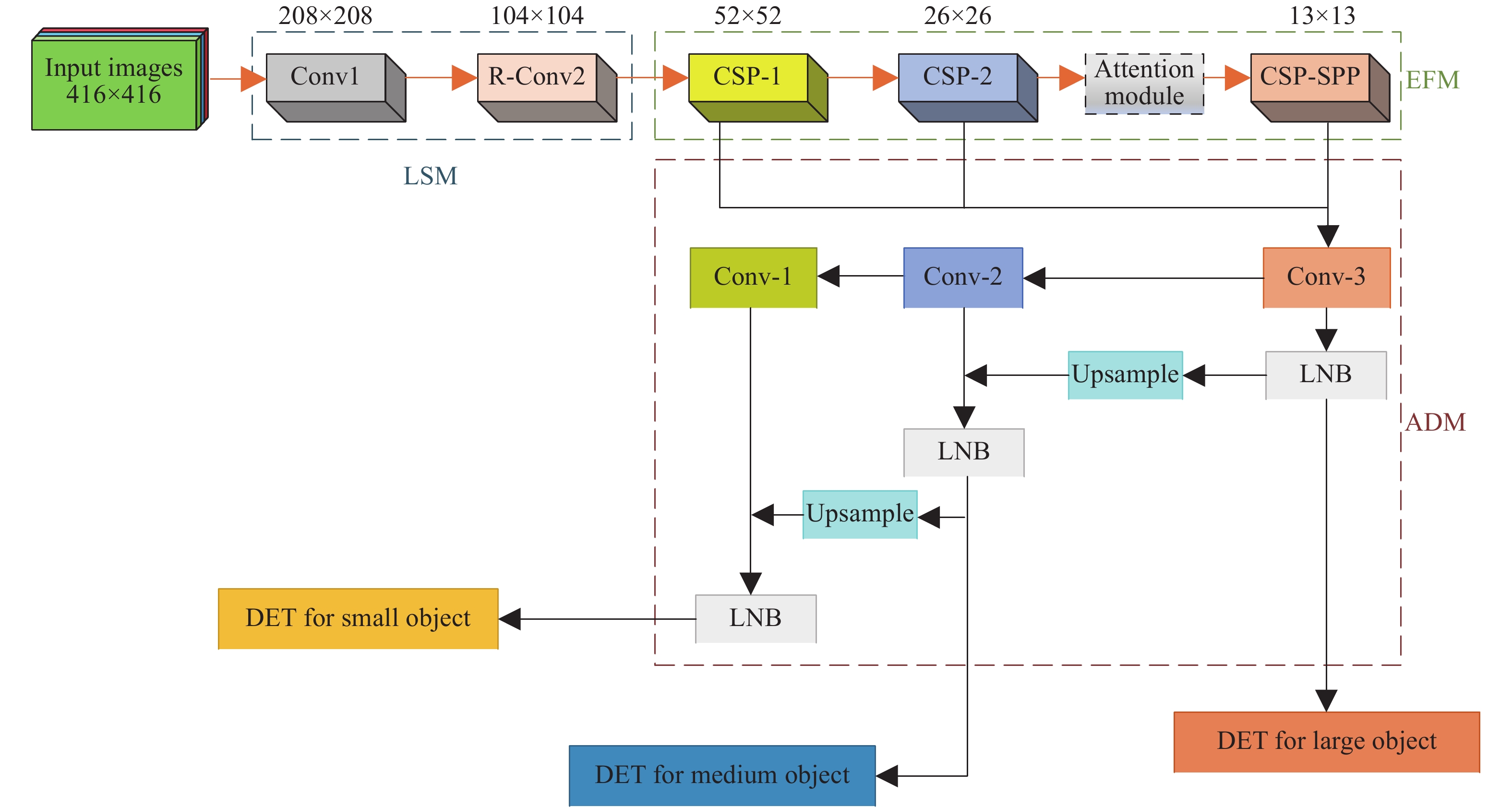

Fig 10
Images of low-attitude environments"

Table 2
Comparison of test results for LA2021"
| Component | Faster | SSD | Mbv2-SSD | YOLOv3 | YOLOv3-tiny | FOCS | Center Net | YOLOv4 | YOLOv4-tiny | LSL-Net |
| Bird | 0.897 6 | 0.835 4 | 0.711 5 | 0.941 0 | 0.803 9 | 0.937 6 | 0.934 4 | 0.962 8 | 0.836 0 | 0.905 4 |
| Kite | 0.785 1 | 0.729 2 | 0.679 4 | 0.861 7 | 0.685 6 | 0.880 7 | 0.867 1 | 0.916 7 | 0.757 4 | 0.871 4 |
| UAV | 0.925 6 | 0.912 5 | 0.816 5 | 0.951 3 | 0.894 0 | 0.967 5 | 0.957 0 | 0.981 3 | 0.934 4 | 0.952 3 |
| mAP | 0.869 5 | 0.825 7 | 0.735 8 | 0.918 0 | 0.794 5 | 0.928 6 | 0.919 5 | 0.953 6 | 0.842 6 | 0.909 7 |
| FPS | 12 | 43 | 81 | 77 | 334 | 42 | 89 | 49 | 287 | 147 |
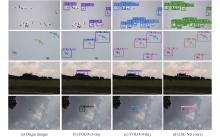
Fig 11
Detection results of different models"
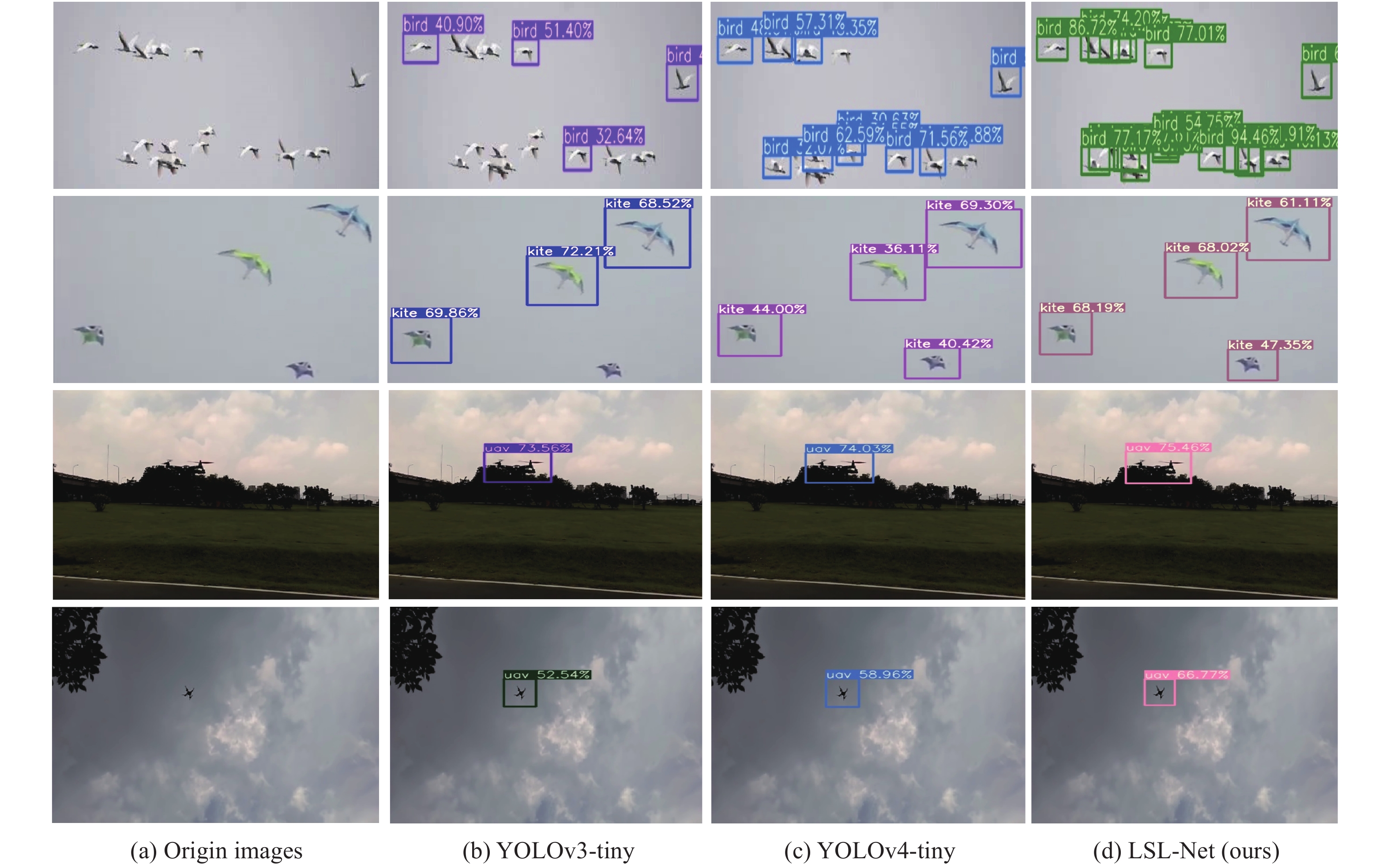
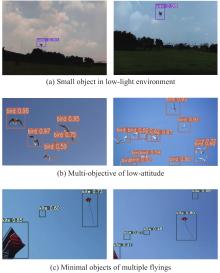
Fig 12
Robustness test results"
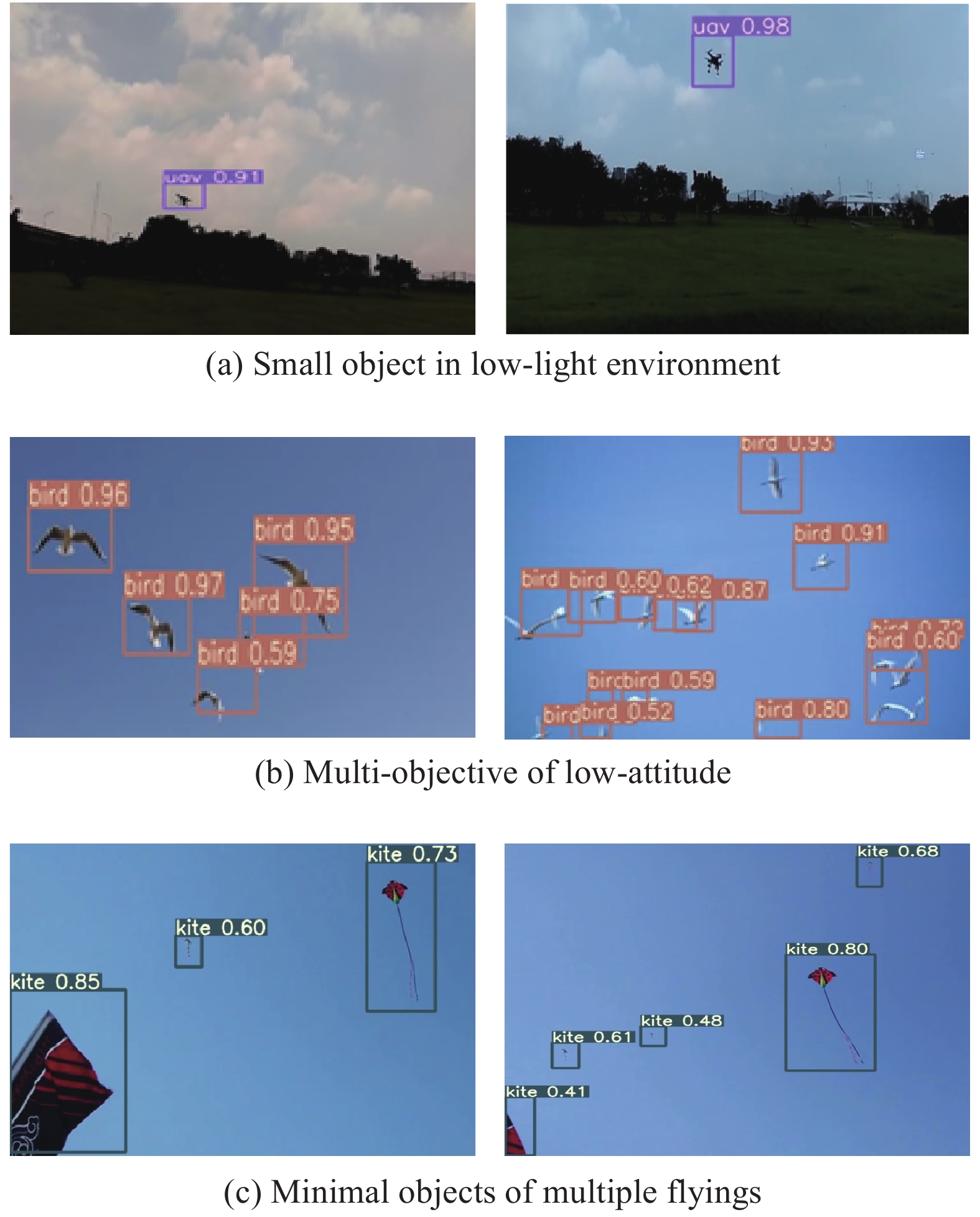
Table 3
Effects of various design choices"
| Component | YOLOv4-tiny | EA-Net | LA-Net | LE-Net | LSL-Net |
| LSM | — | — | √ | √ | √ |
| EFM | — | √ | — | √ | √ |
| ADM | — | √ | √ | — | √ |
| Bird | 0.836 0 | 0.900 5 | 0.871 7 | 0.831 2 | 0.905 4 |
| Kite | 0.757 4 | 0.868 3 | 0.856 2 | 0.806 2 | 0.871 4 |
| UAV | 0.934 4 | 0.949 8 | 0.940 6 | 0.931 5 | 0.952 3 |
| mAP | 0.842 6 | 0.906 2 | 0.889 5 | 0.856 3 | 0.909 7 |
| FPS | 287 | 141 | 169 | 253 | 147 |
Table 4
Results on MS COCO"
| Method | Size | mAP/% | FPS |
| Faster R-CNN[ | — | 39.8 | 9 |
| SSD[ | 300×300 | 25.1 | 43 |
| SSD[ | 512×512 | 28.8 | 22 |
| YOLOv3-SPP[ | 608×608 | 36.2 | 20 |
| YOLOv4[ | 608×608 | 43.5 | 33 |
| CenterNet[ | — | 41.6 | 28 |
| FCOS[ | — | 44.7 | — |
| LSL-Net(ours) | 416×416 | 38.4 | 135 |
| LSL-Net(ours) | 512×512 | 39.1 | 126 |
| LSL-Net(ours) | 608×608 | 40.3 | 118 |

Fig 13
MS COCO results of LSL-Net"

| 1 | ZHANG Y, SI G Y, WANG Y Z Simulation of unmanned aerial vehicle swarm electromagnetic operation concept. Systems Engineering and Electronics, 2020, 42 (7): 1510- 1518. |
| 2 | MA Q, ZHU B, CHENG Z D, et al Detection and recognition method of fast low-altitude unmanned aerial vehicle based on dual channel. Acta Optica Sinica, 2019, 39 (12): 105- 115. |
| 3 | DONG Q, ZOU Q H. Visual UAV detection method with online feature classification. Proc. of the IEEE 2nd Information Technology, Networking, Electronic and Automation Control Conference, 2017: 429–432. |
| 4 | HU Y Y, WU X J, ZHENG G D, et al Object detection of UAV for anti-UAV based on improved YOLO v3. Chinese Control Conference, 2019, 8386- 8390. |
| 5 | ZHANG H, CAO C H, XU L W, et al A UAV detection algorithm based on an artificial neural network. IEEE Access, 2018, 6 (1): 24720- 24728. |
| 6 | ZHAO W C, ZHANG Q, LI H, et al. Low-altitude UAV detection method based on one-staged detection framework. Proc. of the 2nd International Conference on Advances in Computer Technology, Information Science and Communications, 2020: 112–117. |
| 7 | HE K M, ZHANG X Y, REN S Q, et al. Deep residual learning for image recognition. Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2016: 770–778. |
| 8 |
LOW D G Distinctive image features from scale-invariant keypoints. International Journal of Computer Vision, 2004, 60 (2): 91- 110.
doi: 10.1023/B:VISI.0000029664.99615.94 |
| 9 | BAY H, TUYTELAARS T, GOOL L V SURF: speeded up robust features. Computer Vision & Image Understanding, 2006, 110 (3): 404- 417. |
| 10 | FREUND Y. Experiments with a new boosting algorithm. Proc. of the 13th International Conference on Machine Learning, 1996: 148–156. |
| 11 |
WU S Q, NAGAHASHI H Parameterized AdaBoost: introducing a parameter to speed up the training of real AdaBoost. IEEE Signal Processing Letters, 2014, 21 (6): 687- 691.
doi: 10.1109/LSP.2014.2313570 |
| 12 | WANG X H, ZHANG C, LI C, et al Unmanned aerial vehicles target detection based on bio-inspired visual attention. Aeronautical Science & Technology, 2015, 26 (11): 76- 82. |
| 13 |
OMID-ZOHOOR A, YOUNG C, TA D, et al Toward always-on mobile object detection: energy versus performance tradeoffs for embedded hog feature extraction. IEEE Trans. on Circuits and Systems for Video Technology, 2018, 28 (5): 1102- 1115.
doi: 10.1109/TCSVT.2017.2653187 |
| 14 | LIU Y, DU H J, YUE Z H, et al Unmanned aerial vehicle detection method based on random forest. Computer Engineering and Applications, 2019, 55 (7): 162- 167. |
| 15 |
LI Y Z, XIE P C, TANG Z S, et al SVM-based sea-surface small target detection: a false-alarm-rate-controllable approach. IEEE Geoscience and Remote Sensing Letters, 2019, 16 (8): 1225- 1229.
doi: 10.1109/LGRS.2019.2894385 |
| 16 |
BAZI Y, MELGANI F Convolutional SVM networks for object detection in UAV imagery. IEEE Trans. on Geoscience and Remote Sensing, 2018, 56 (6): 3107- 3118.
doi: 10.1109/TGRS.2018.2790926 |
| 17 | ZEILER M D, FERGUS R. Visualizing and understanding convolutional neural networks. Proc. of the European Conference on Computer Vision, 2014: 818–833. |
| 18 | GIRSHICK R, DONAHUE J, DARRELL T, et al Rich feature hierarchies for accurate object detection and semantic segmentation. Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2014, 580- 587. |
| 19 | GIRSHICK R. Fast R-CNN. Proc. of the IEEE International Conference on Computer Vision, 2015: 1440–1448. |
| 20 |
REN S Q, HE K M, GIRSHICK R, et al Faster R-CNN: towards real-time object detection with region proposal networks. IEEE Trans. on Pattern Analysis and Machine Intelligence, 2017, 39 (6): 1137- 1149.
doi: 10.1109/TPAMI.2016.2577031 |
| 21 | WANG J Q, CHEN K, YANG S, et al. Region proposal by guided anchoring. Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2019: 2965–2974. |
| 22 | ANGUELOV D, ERHAN D, SZEGEDY C, et al. SSD: single shot multibox detector. Proc. of the European Conference on the Computer Vision, 2016: 21–37. |
| 23 | REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: unified, real-time object detection. Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2016: 779–788. |
| 24 | REDOMN J, FARHADI A. YOLO9000: better, faster, stronger. Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2017: 6517–6525. |
| 25 | REDOMN J, FARHADI A. YOLOv3: an incremental improvement. https://arXiv.arg/abs/1804.02767. |
| 26 | BOCHKOVSKIY A, WANG C Y, MARK LIAO H Y. YOLOv4: optimal speed and accuracy of object detection. https://arXiv.arg/abs/2004.10934. |
| 27 | ZHOU X, WANG D, KRAHENBUHL P. Objects as points. https://arXiv.arg/abs/1904.07850. |
| 28 | TIAN Z, SHEN C H, CHEN H, et al. FCOS: fully convolutional one-stage object detection. Proc. of the IEEE/CVF International Conference on Computer Vision, 2019: 9626–9635. |
| 29 | LI Q Z, XIONG R, WANG R P, et al Research on real-time UAV recognition method based on SSD algorithm. Ship Electronic Engineering, 2019, 39 (5): 30- 35. |
| 30 |
KRIZHEVSKY A, SUTSKEVER I, GEOFFREY E H ImageNet classification with deep convolutional neural networks. Communications of the ACM, 2017, 60 (6): 84- 90.
doi: 10.1145/3065386 |
| 31 | RANGA A, TYAGI A, BERG A C, et al. DSSD: deconvolutional single shot detector. https://arXiv.arg/abs/1701.06659. |
| 32 |
ZENG J X, XIONG J L, FU X, et al ReFPN-FCOS: one-stage object detection for feature learning and accurate localization. IEEE Access, 2020, 8, 225052- 225063.
doi: 10.1109/ACCESS.2020.3044564 |
| 33 | FAN J X, LI D W, WANG H L, et al. UAV low altitude flight threat perception based on improved SSD and KCF. Proc. of the IEEE 15th International Conference on Control and Automation, 2019: 121–132. |
| 34 |
FAN S Q, ZHU F H, CHEN S C, et al FII-CenterNet: an anchor-free detector with foreground attention for traffic object detection. IEEE Trans. on Vehicular Technology, 2021, 70 (1): 121- 132.
doi: 10.1109/TVT.2021.3049805 |
| 35 | MA Q, ZHU B, ZHANG H W, et al Low-altitude UAV detection and recognition method based on optimized YOLOv3. Laser & Optoelectronics Progress, 2019, 56 (20): 279- 286. |
| 36 | CUI Y P, WANG Y H, HU J W Detection method for a dynamic small target using the improved YOLOv3. Journal of Xidian University, 2020, 47 (3): 1- 7. |
| 37 | ARTUUR D, VASSILVITSKII S. k-means++: the advantages of careful seeding. Proc. of the 18th Annual ACM-SIAM Symposium on Discrete Algorithms, 2007: 1027–1035. |
| 38 |
WEI X K, WEI D H, SUO D, et al Multi-object defect identification for railway track line based on image processing and improved YOLOv3 model. IEEE Access, 2020, 8, 61973- 61988.
doi: 10.1109/ACCESS.2020.2984264 |
| 39 | WANG C Y, LIAO H Y M, WU Y H, et al. CSPNet: a new backbone that can enhance learning capability of CNN. Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, 2020: 1571–1580. |
| 40 | HE K M, ZHANG X Y, REN S Q, et al. Deep residual learning for image recognition. computer vision and pattern recognition. Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2016: 770–778. |
| 41 | XIE S N, GIRSHICK R, DOLLAR P, et al. Aggregated residual transformations for deep neural networks. Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2017: 5987–5995. |
| 42 | TSUNG Y L, MICHAEL M, BELONGIE S, et al. Microsoft COCO: common objects in context. Proc. of the European Conference on Computer Vision, 2014: 740–755. |
| [1] | Honghong ZHANG, Xusheng GAN, Shuangfeng LI, Zhiyuan CHEN. UAV safe route planning based on PSO-BAS algorithm [J]. Journal of Systems Engineering and Electronics, 2022, 33(5): 1151-1160. |
| [2] | Yangjun GAO, Guangyun LI, Zhiwei LYU, Lundong ZHANG, Zhongpan LI. Improved adaptively robust estimation algorithm for GNSS spoofer considering continuous observation error [J]. Journal of Systems Engineering and Electronics, 2022, 33(5): 1237-1248. |
| [3] | Yuan ZENG, Wenbin LU, Bo YU, Shifei TAO, Haosu ZHOU, Yu CHEN. Improved IMM algorithm based on support vector regression for UAV tracking [J]. Journal of Systems Engineering and Electronics, 2022, 33(4): 867-876. |
| [4] | Jun HAN, Weixing LI, Kai FENG, Feng PAN. Vision-based aerial image mosaicking algorithm with object detection [J]. Journal of Systems Engineering and Electronics, 2022, 33(2): 259-268. |
| [5] | Dongju CAO, Wendong YANG, Hui CHEN, Yang WU, Xuanxuan TANG. Energy efficiency maximization for buffer-aided multi-UAV relaying communications [J]. Journal of Systems Engineering and Electronics, 2022, 33(2): 312-321. |
| [6] | Haifen YANG, Hao ZHANG, Houjun WANG, Zhengyang GUO. A novel approach for unlabeled samples in radiation source identification [J]. Journal of Systems Engineering and Electronics, 2022, 33(2): 354-359. |
| [7] | Yangyang JIANG, Yan GAO, Wenqi SONG, Yue LI, Quan QUAN. Bibliometric analysis of UAV swarms [J]. Journal of Systems Engineering and Electronics, 2022, 33(2): 406-425. |
| [8] | Jinqiang HU, Husheng WU, Renjun ZHAN, Rafik MENASSEL, Xuanwu ZHOU. Self-organized search-attack mission planning for UAV swarm based on wolf pack hunting behavior [J]. Journal of Systems Engineering and Electronics, 2021, 32(6): 1463-1476. |
| [9] | Ziquan YU, Youmin ZHANG, Bin JIANG. PID-type fault-tolerant prescribed performance control of fixed-wing UAV [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1053-1061. |
| [10] | Juan Antonio VAZQUEZ TREJO, Adrien GUENARD, Manuel ADAM-MEDINA, Jean-Christophe PONSART, Laurent CIARLETTA, Damiano ROTONDO, Didier THEILLIOL. Event-triggered leader-following formation control for multi-agent systems under communication faults: application to a fleet of unmanned aerial vehicles [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1014-1022. |
| [11] | Zhao SUN, Chao MA, Liang WANG, Ran MENG, Shanshan PEI. A deep learning-based binocular perception system [J]. Journal of Systems Engineering and Electronics, 2021, 32(1): 7-20. |
| [12] | Hongyin SHI, Yue LIU, Jianwen GUO, Mingxin LIU. ISAR autofocus imaging algorithm for maneuvering targets based on deep learning and keystone transform [J]. Journal of Systems Engineering and Electronics, 2020, 31(6): 1178-1185. |
| [13] | Chuan LIN, Qing CHANG, Xianxu LI. Uplink NOMA signal transmission with convolutional neural networks approach [J]. Journal of Systems Engineering and Electronics, 2020, 31(5): 890-898. |
| [14] | Gaofeng WU, Kaifang WAN, Xiaoguang GAO, Xiaowei FU. Placement of unmanned aerial vehicles as communication relays in two-tiered multi-agent system: clustering based methods [J]. Journal of Systems Engineering and Electronics, 2020, 31(2): 231-242. |
| [15] | Zhen XU, Enze ZHANG, Qingwei CHEN. Rotary unmanned aerial vehicles path planning in rough terrain based on multi-objective particle swarm optimization [J]. Journal of Systems Engineering and Electronics, 2020, 31(1): 130-141. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||