
Journal of Systems Engineering and Electronics ›› 2021, Vol. 32 ›› Issue (1): 178-196.doi: 10.23919/JSEE.2021.000016
• CONTROL THEORY AND APPLICATION • Previous Articles Next Articles
Yue LI1,*( ), Lei HE2(), Qunli XIA1()
), Lei HE2(), Qunli XIA1()
Received:2020-03-22
Online:2021-02-25
Published:2021-02-25
Contact:
Yue LI
E-mail:liyue627167955@163.com;qiuxh759@163.com;1010@bit.edu.cn
About author:Supported by:Yue LI, Lei HE, Qunli XIA. Line-of-sight rates extraction of roll-pitch seeker under anti-infrared decoy state[J]. Journal of Systems Engineering and Electronics, 2021, 32(1): 178-196.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
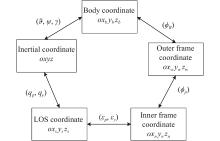
Fig 1
Transform relationship of coordinate systems"
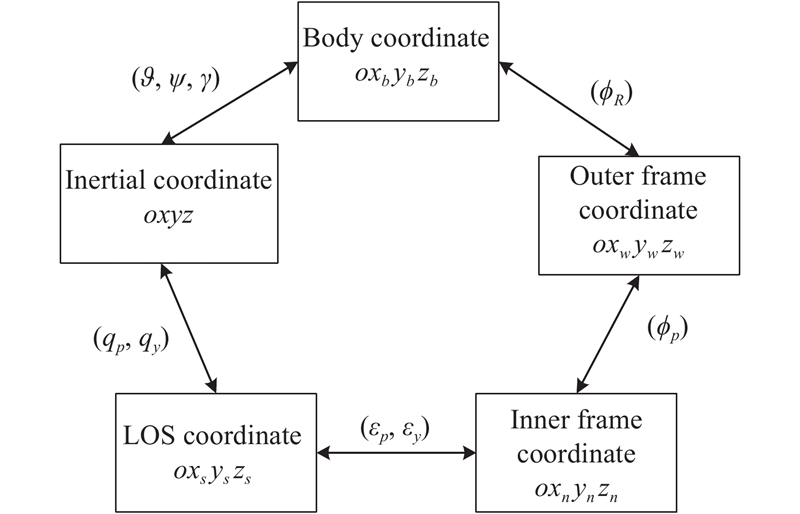
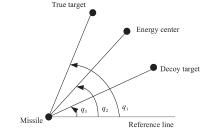
Fig 2
Seeker tracking the energy center"
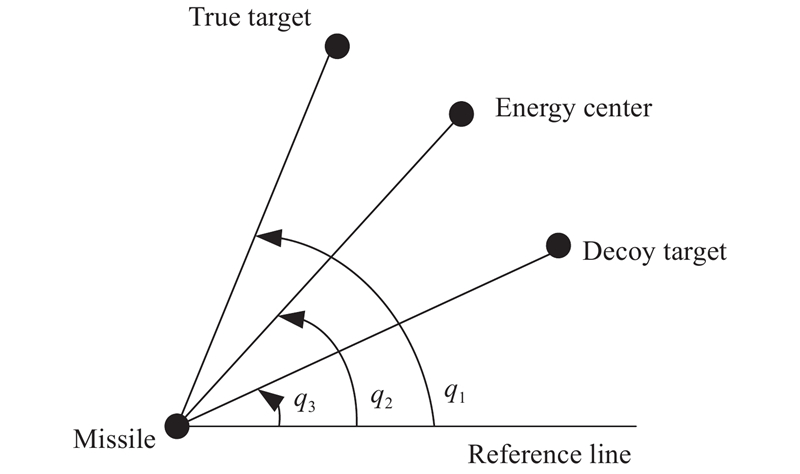
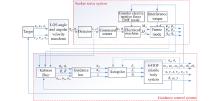
Fig 3
Guidance control loop of seeker in normal state"
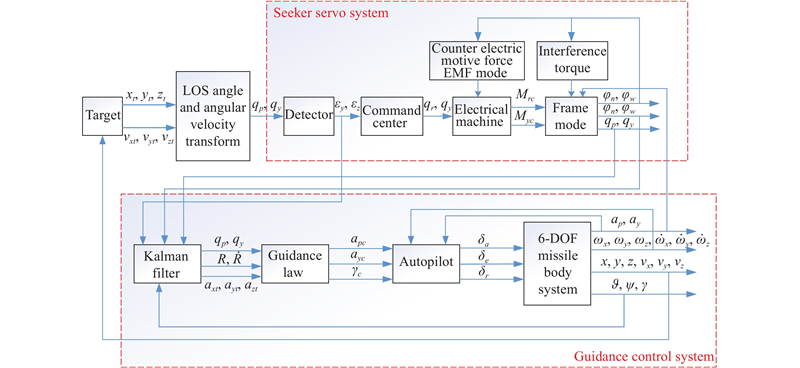

Fig 4
Guidance control loop of seeker under anti-infrared decoy state"
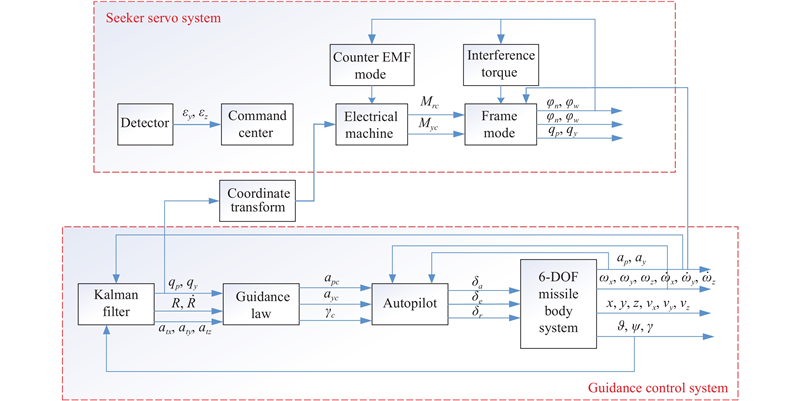
Table 1
Initial value of Kalman filter estimation"
| Initial parameter | Value |
| | 1.4 |
| | 0 |
| | 4.6 |
| | 0 |
| | 9.8 |
| | ?900 |
| | 0 |
| | 0 |
| | 0 |
Table 2
Initial estimation error of state variables"
| Initial parameter | Value |
| | 0.4 |
| | 0.4 |
| | 0.4 |
| | 0.4 |
| | 200 |
| | 100 |
| | 10 |
| | 10 |
| | 10 |
Table 3
Different cases with measurements"
| Case | Description | Measurement |
| 1 | Normal state with true values | No-measurement |
| 2 | Jamming state without any method | LOS angles |
| 3 | Anti-infrared decoy state without measurements | No-measurement |
| 4 | Anti-infrared decoy state uses LOS angles as measurements | LOS angles at 5 s |
| 5 | Anti-infrared decoy state uses accelerations as measurements | Extrapolated accelerations |
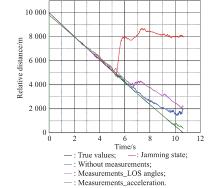
Fig 5
Simulation of ${{R}}$ "
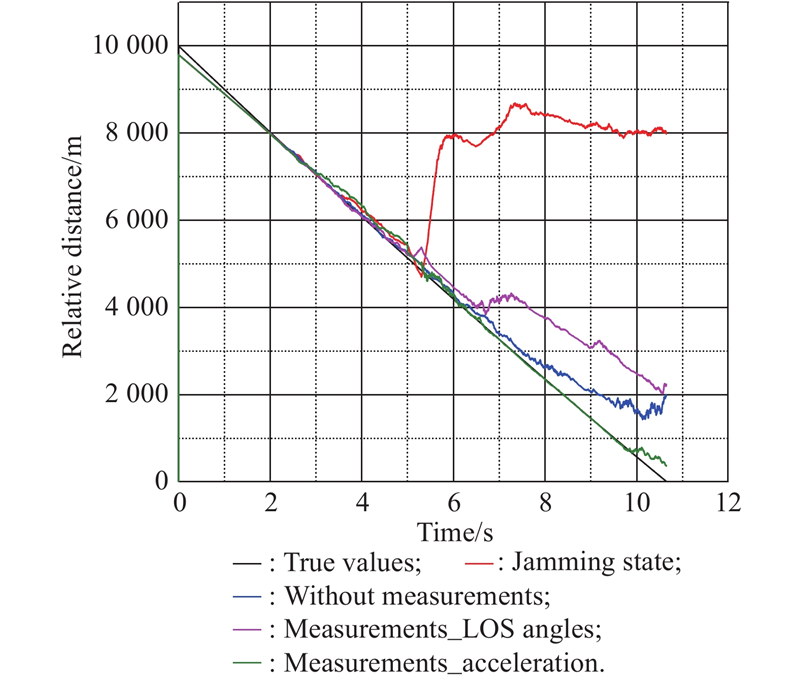
Fig 6
Simulation of $\dot {{R}}$ "
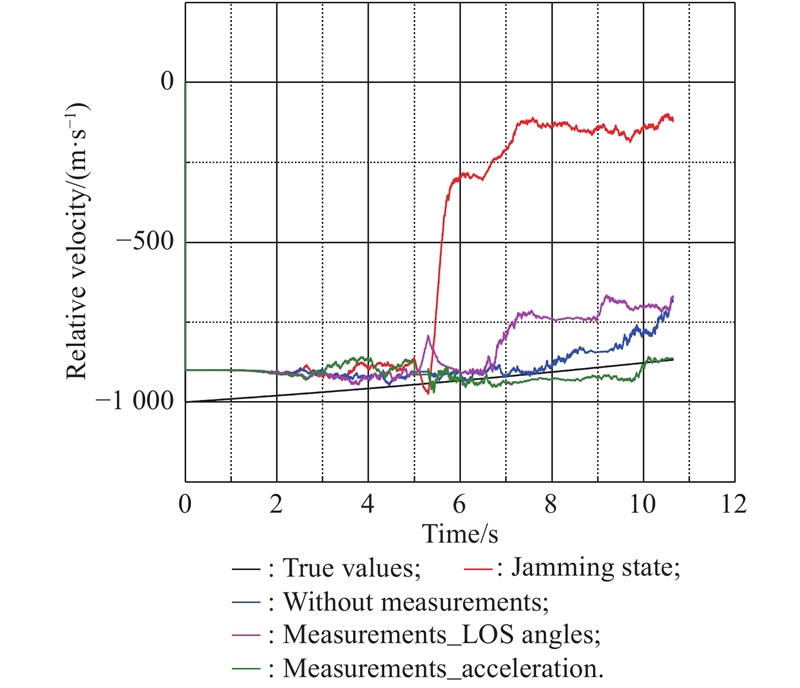
Fig 7
Simulation of ${{{q}}_{{p}}}$ "
Fig 8
Simulation of ${\dot{{ q}}_{{p}}}$ "
Fig 9
Simulation of ${{{q}}_{{y}}}$ "
Fig 10
Simulation of ${\dot {{q}}_{{y}}}$ "
Fig 11
Simulation of ${{{a}}_{{{tx}}}}$ "
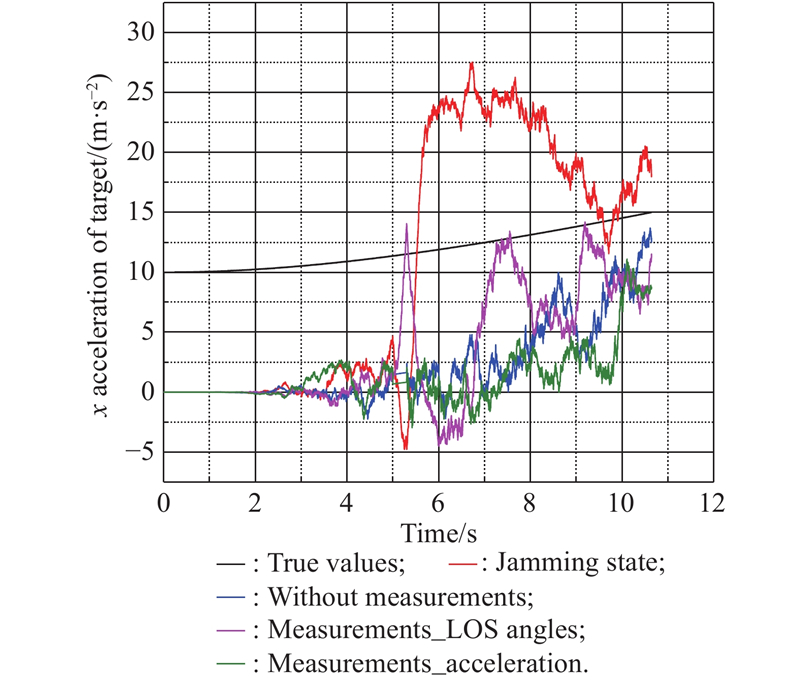
Fig 12
Simulation of ${{{a}}_{{{ty}}}}$ "
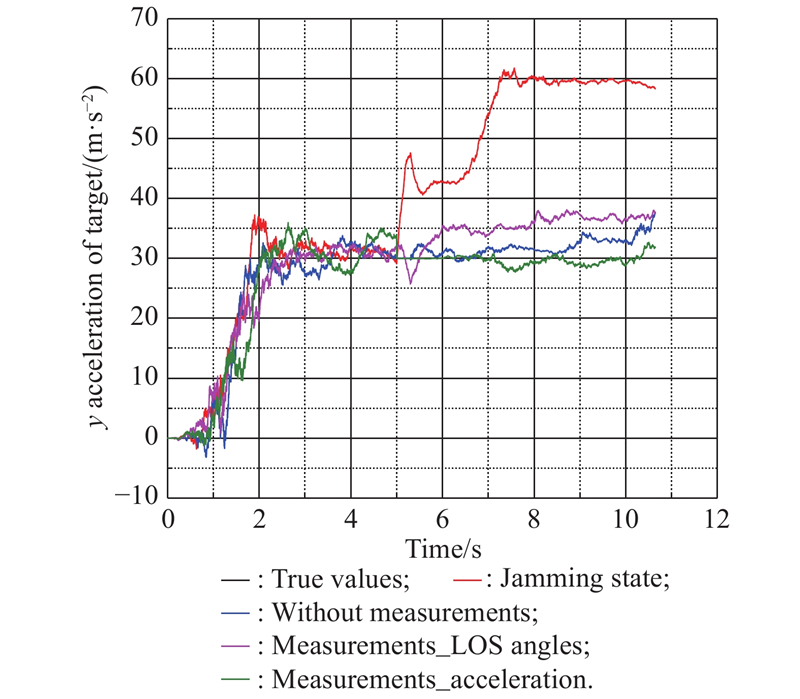
Fig 13
Simulation of ${{{a}}_{{{tz}}}}$ "
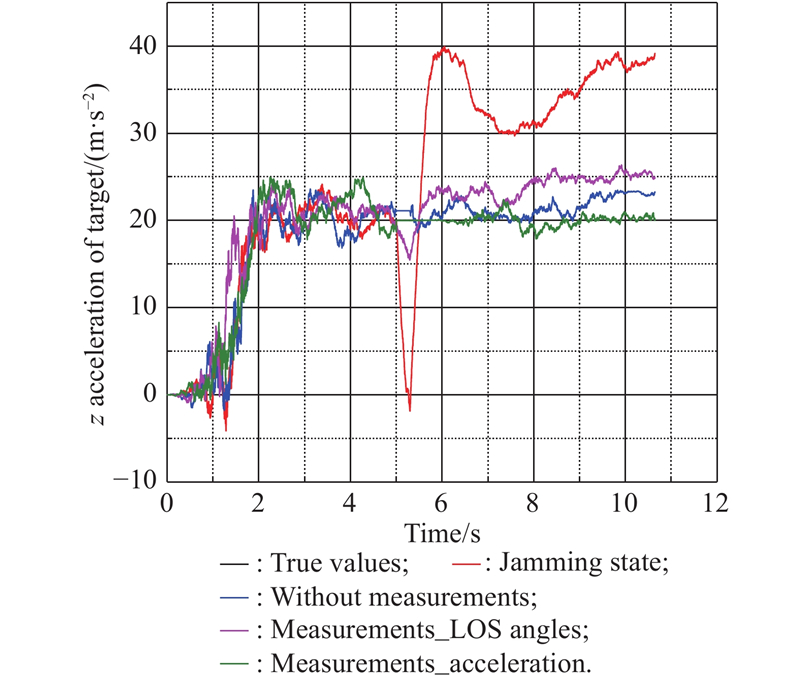
Fig 14
Motion of the missile and the target"
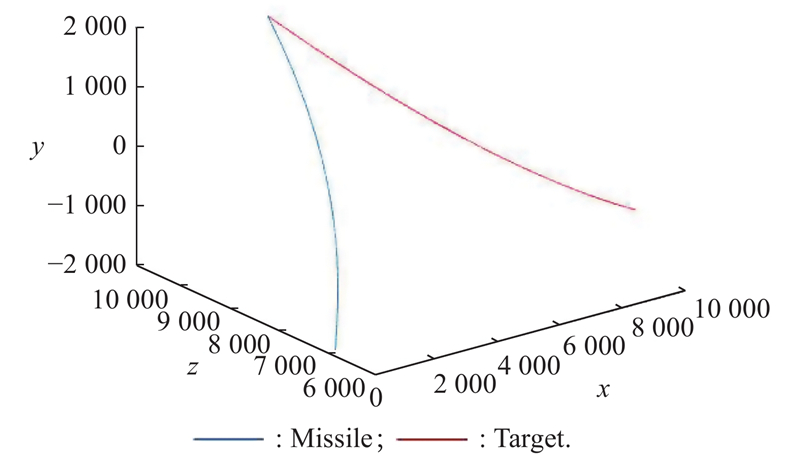
Table 4
Summary of specific data in Figs. 5-13 "
| Figure | | | |||||
| Method 1 | Method 2 | New method | Method 1 | Method 2 | New method | ||
| 5 | 151.8 | 530.9 | 142.7 | 628.11 | 1 669.07 | 10.248 | |
| 6 | 40.02 | 149.8 | 33.35 | 56.271 | 176.29 | 32.687 | |
| 8 | 4.77×10?4 | 24.4×10?4 | 0.178×10?4 | 4.459 3×10?4 | 3.48 4×10?4 | 6.821 8×10?4 | |
| 10 | 3.27×10?4 | 20.4×10?4 | 1.12×10?4 | 3.79×10?4 | 2.768×10?4 | 6.132×10?4 | |
| 11 | 9.6 | 2.47 | 10.33 | 7.305 | 5.1547 | 11.369 | |
| 12 | 0.035 | 4.2 | 0.002 | 2.122 7 | 6.732 | 0.556 1 | |
| 13 | 0.97 | 4.32 | 0.004 | 1.785 | 4.807 | 0.446 | |
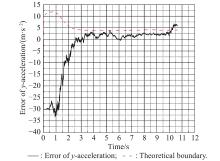
Fig 15
Estimation error of ${{{a}}_{{{ty}}}}$ and the theoretical boundary "

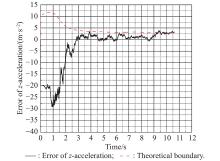
Fig 16
Estimation error of ${{{a}}_{{{tz}}}}$ and the theoretical boundary "
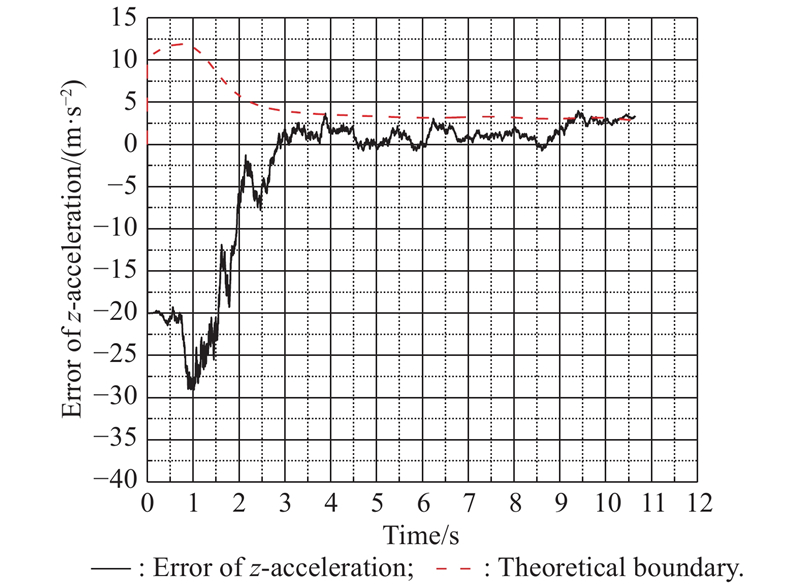
Table 5
Different error cases and compared methods"
| Case | Description | Measurement |
| 1 | Normal state with true values | No-measurement |
| 2 | Anti-infrared decoy state without measurements | No-measurement |
| 3 | Anti-infrared decoy state using LOS angles as measurements | LOS angles at 5 s |
| 4 | Anti-infrared decoy state using accelerations as measurements | Estimated accelerations |
| 5 | Use accelerations as measurements with error | Estimated accelerations |
| 6 | Use accelerations as measurements with error | Estimated accelerations |
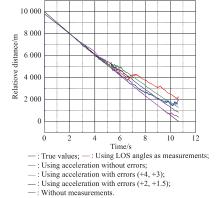
Fig 17
Simulation of ${{R}}$ with estimation errors "
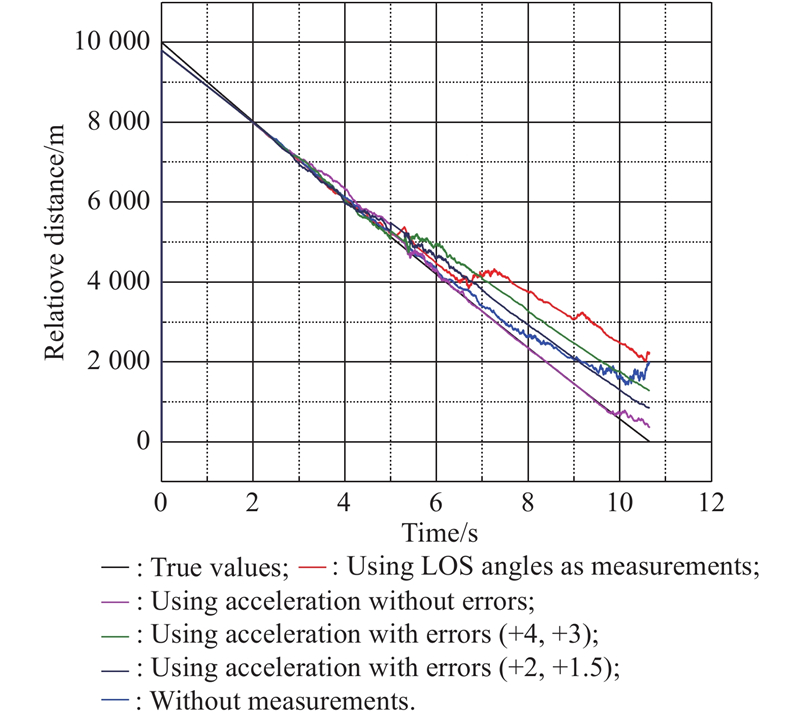
Fig 18
Simulation of $\dot {{R}}$ with estimation errors "
Fig 19
Simulation of ${\dot {{q}}_{{p}}}$ with estimation errors "
Fig 20
Simulation of ${\dot {{q}}_{{y}}}$ with estimation errors "
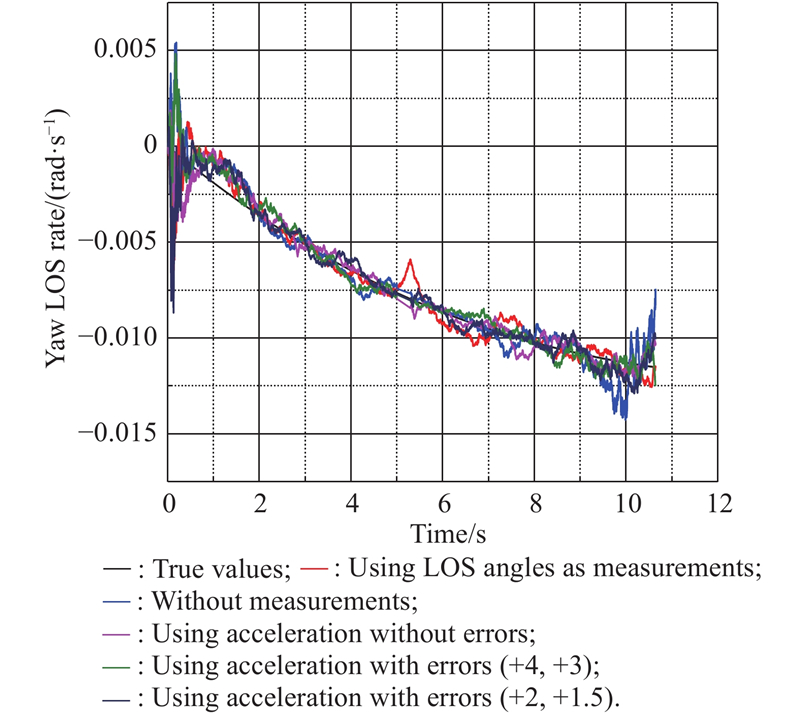
Fig 21
Simulation of ${{{a}}_{{{ty}}}}$ with estimation errors "
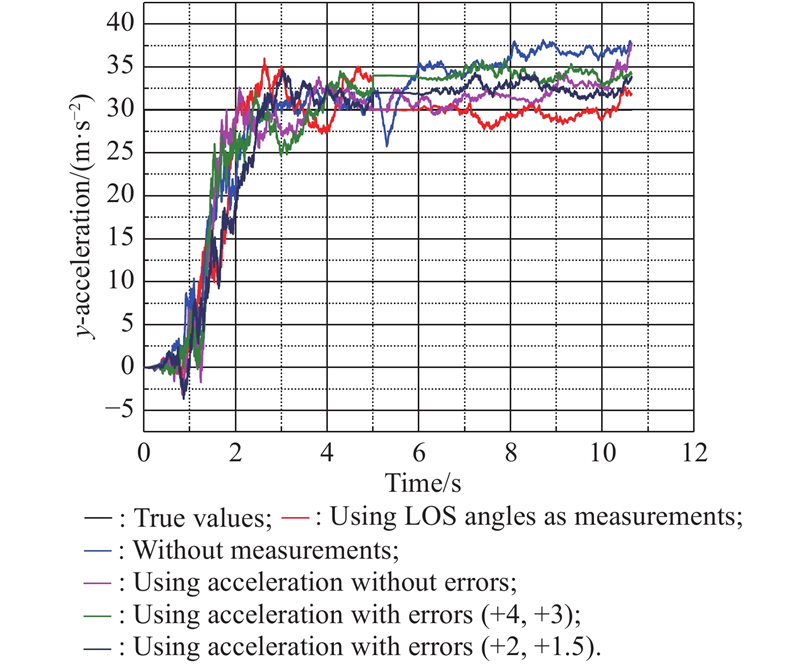
Fig 22
Simulation of ${{{a}}_{{{tz}}}}$ with estimation errors "
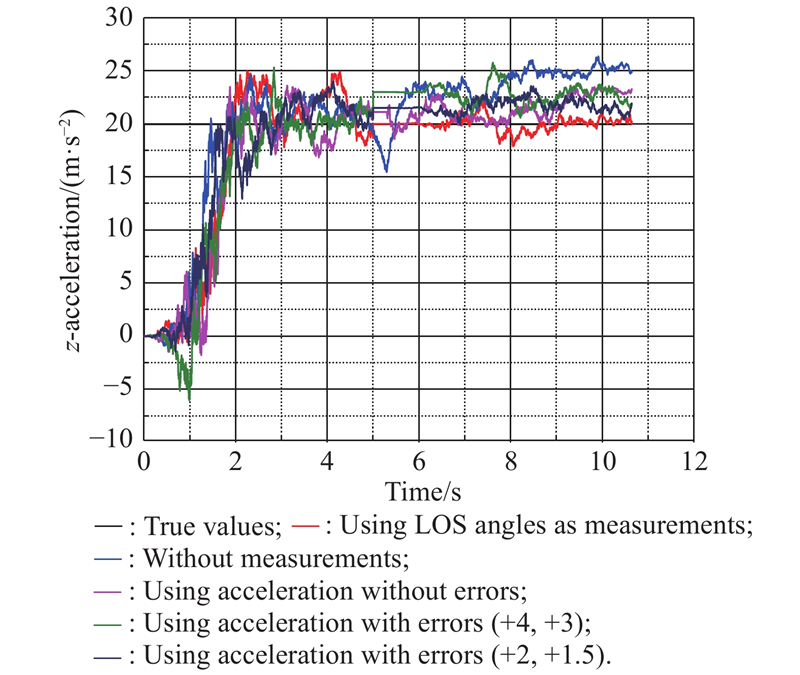
Table 6
Summary of specific data in Figs. 17-22 "
| Figure | | | |||||||||
| Method 1 | Method 2 | Method 3 | Method 4 | Method 5 | Method 1 | Method 2 | Method 3 | Method 4 | Method 5 | ||
| 17 | 530.991 5 | 151.818 8 | 142.738 1 | 203.835 4 | 367.674 6 | 1 668.256 | 630.457 | 6.049 95 | 1 007.856 | 636.762 5 | |
| 18 | 149.847 | 40.028 36 | 33.353 35 | 43.106 98 | 86.853 68 | 176.4141 | 56.358 36 | 32.687 7 | 104.733 1 | 53.749 55 | |
| 19 | 0.002 44 | 0.000 48 | 0.000 02 | 0.000 76 | 0.000 18 | 0.000006 | 0.000 021 | 0.000 303 | 0.000 134 | 0.000 224 | |
| 20 | 0.002 03 | 0.000 03 | 0.000 31 | 0.000 45 | 0.000 09 | 0.000033 | 0.000 096 | 0.000 1 | 0.000 123 | 0.000 36 | |
| 21 | 4.236 | 0.035 11 | 0.002 45 | 4.002 99 | 2.004 25 | 6.729378 | 2.118 827 | 0.418 71 | 4.108 605 | 2.631 62 | |
| 22 | 4.324 15 | 0.978 53 | 0.004 86 | 2.998 76 | 1.499 18 | 4.79226 | 1.784 803 | 0.385 96 | 2.386 265 | 2.137 486 | |
Table 7
Different cases with measurements with the CA extended model"
| Case | Description | Measurement |
| 1 | Normal state with true values | No-measurement |
| 2 | Anti-infrared decoy state without measurements | No-measurement |
| 3 | Anti-infrared decoy state using LOS angles as measurements | LOS angles at 5 s |
| 4 | Anti-infrared decoy state using accelerations as measurements | Extrapolated accelerations |
Fig 23
Simulation of ${{R}}$ with the CA extended model "
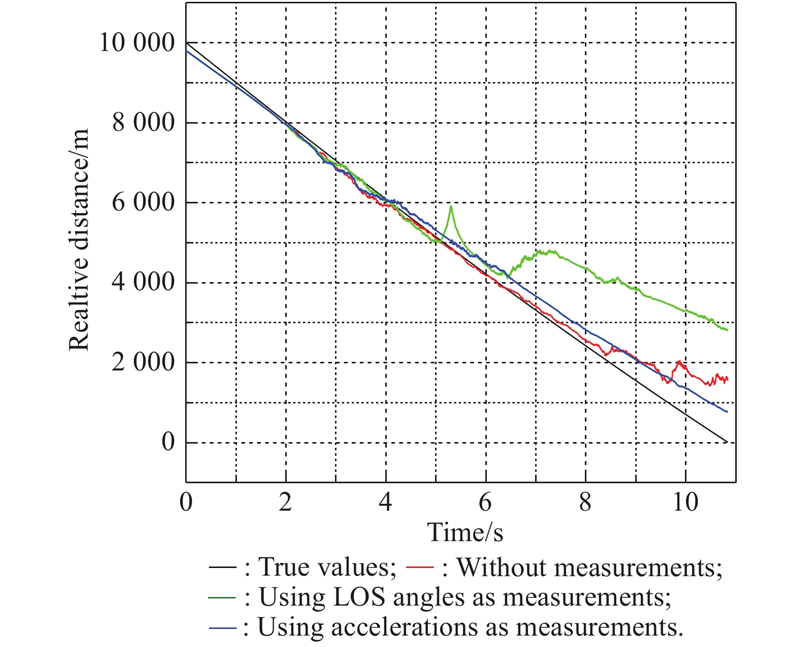
Fig 24
Simulation of $\dot {{R}}$ with the CA extended model "
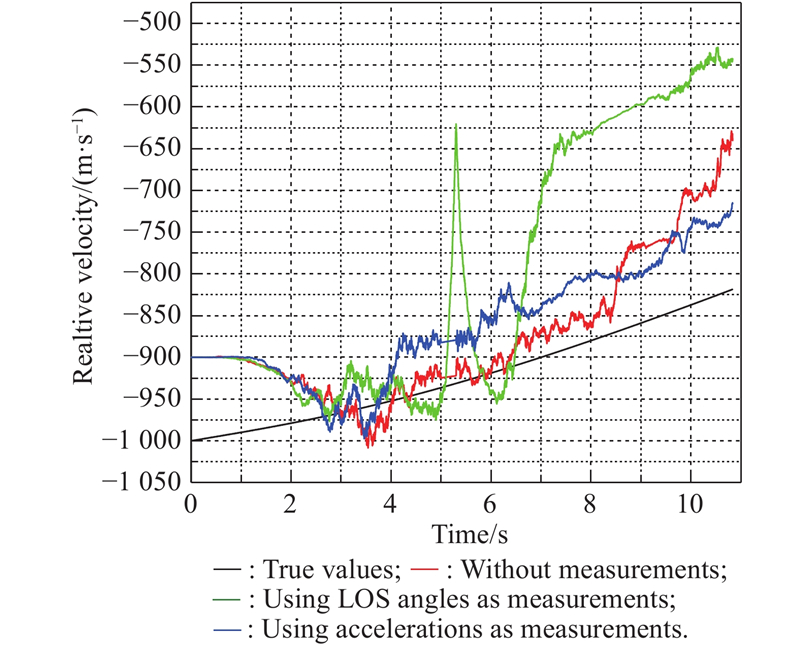
Fig 25
Simulation of ${\dot {{q}}_{{p}}}$ with the CA extended model "
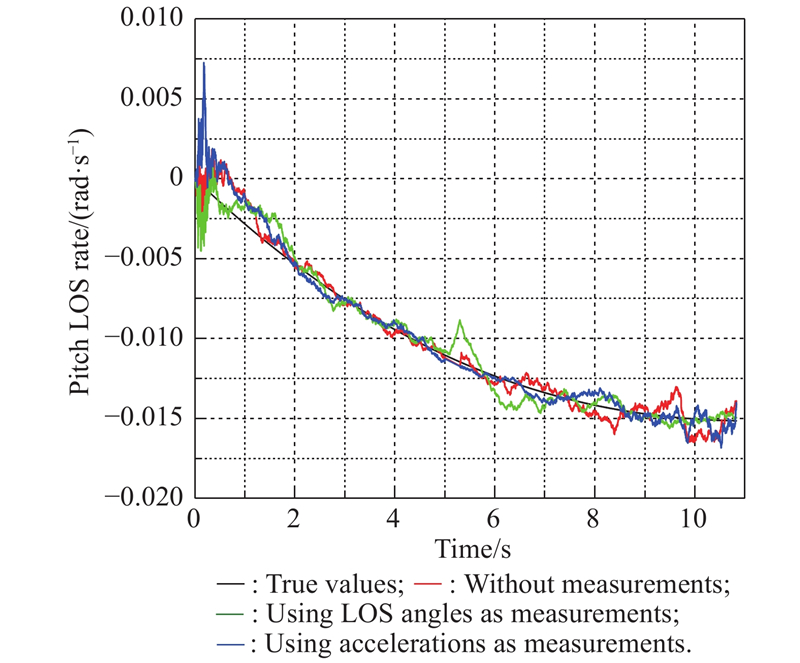
Fig 26
Simulation of ${\dot {{q}}_{{y}}}$ with the CA extended model "
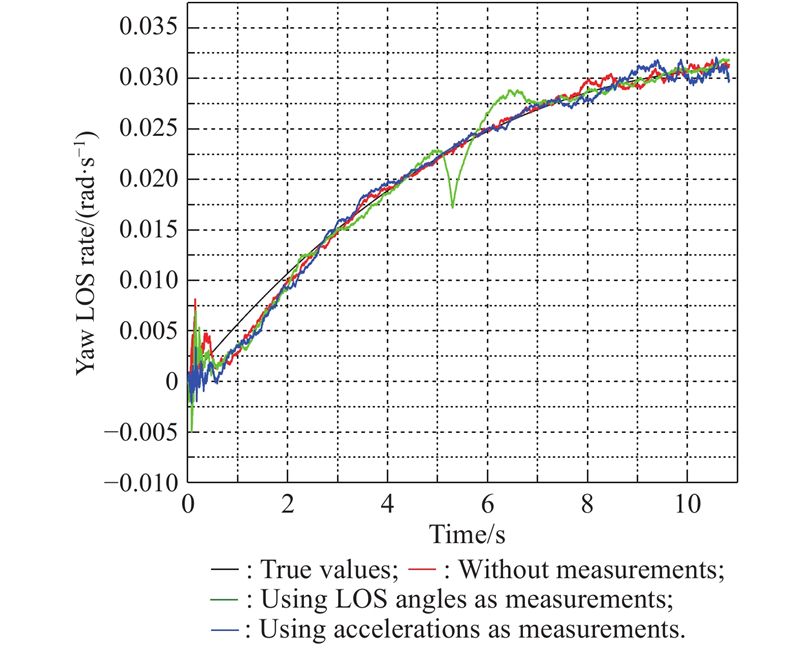
Fig 27
Simulation of ${{{a}}_{{{ty}}}}$ with the CA extended model "
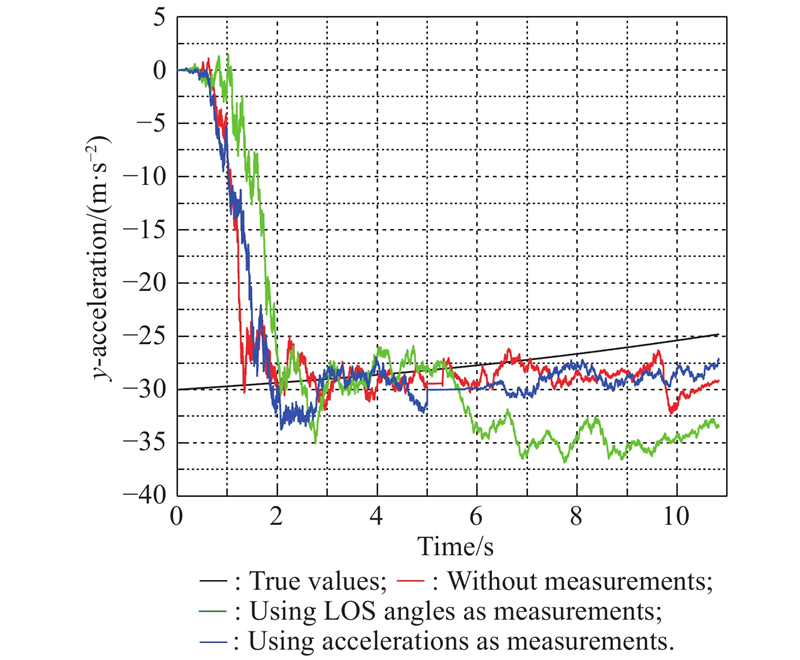
Fig 28
Simulation of ${{{a}}_{{{tz}}}}$ with the CA extended model "
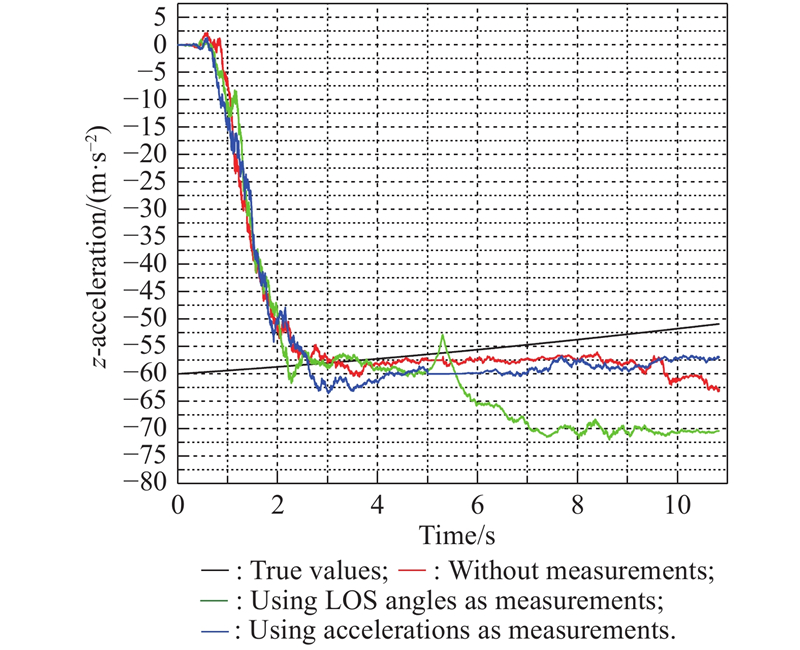
Table 8
Summary of specific data in Figs. 23-28 "
| Figure | | | |||||
| Without measurements | Using LOS angles | Using acceleration | Without measurements | Using LOS angles | Using acceleration | ||
| 23 | 185.813 85 | 1 057.565 75 | 41.433 45 | 516.089 5 | 2 208.678 | 473.623 6 | |
| 24 | 54.2 | 310.366 72 | 9.765 66 | 73.218 6 | 260.021 8 | 70.249 04 | |
| 25 | 2.495×10?4 | 0.002 62 | 2.461×10?4 | 6.42×10?4 | 2.83×10?4 | 3.89×10?4 | |
| 26 | 8.496×10?5 | 0.005 78 | 1.938×10?4 | 8.6×10?5 | 0.0001 | 0.000214 | |
| 27 | 1.951 | 0.626 26 | 1.368 99 | 2.768 98 | 8.618 12 | 2.501 04 | |
| 28 | 3.821 7 | 3.356 35 | 1.282 67 | 5.462 78 | 17.49 89 | 5.049 85 | |
Table 9
Different cases with measurements under singer model"
| Case | Description | Measurement |
| 1 | Normal state with true values | No-measurement |
| 2 | Anti-infrared decoy state without measurements | No-measurement |
| 3 | Anti-infrared decoy state using LOS angles as measurements | LOS angles at 5 s |
| 4 | Anti-infrared decoy state using accelerations as measurements | Extrapolated accelerations |
Fig 29
Simulation of ${{R}}$ with the singer model "
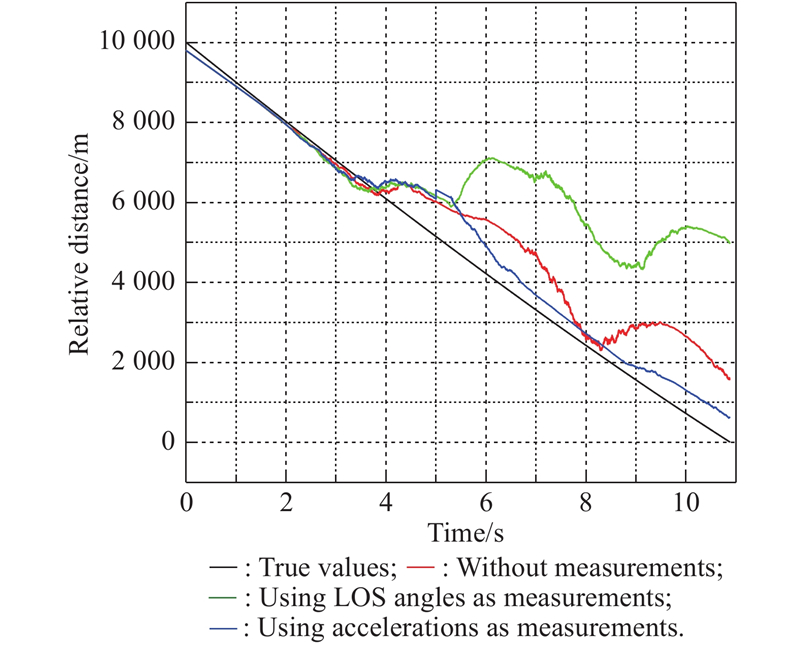
Fig 30
Simulation of $\dot {{R}}$ with the singer model "
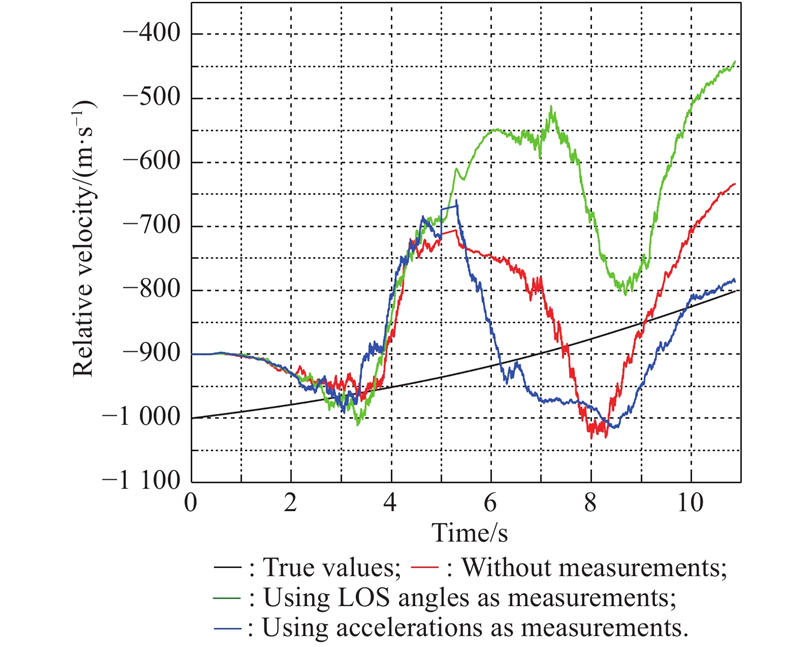
Fig 31
Simulation of ${\dot {{q}}_{{p}}}$ with the singer model "
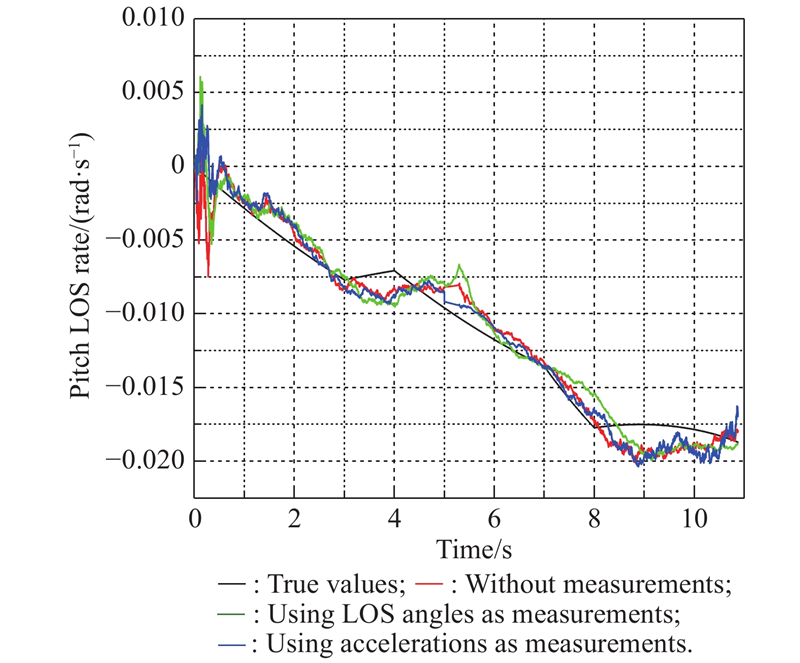
Fig 32
Simulation of ${\dot {{q_y}}}$ with the singer model "
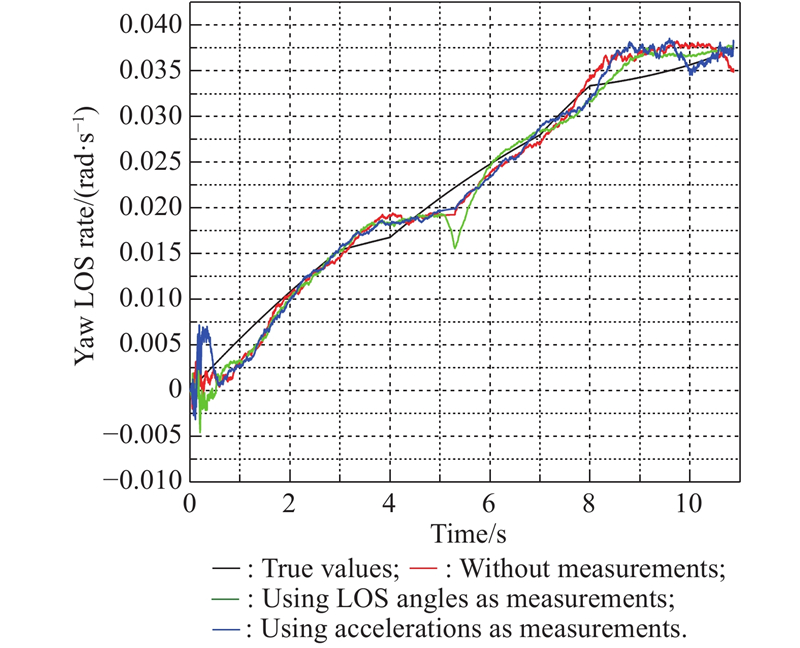
Fig 33
Simulation of ${{{a}}_{{{ty}}}}$ with the singer model "
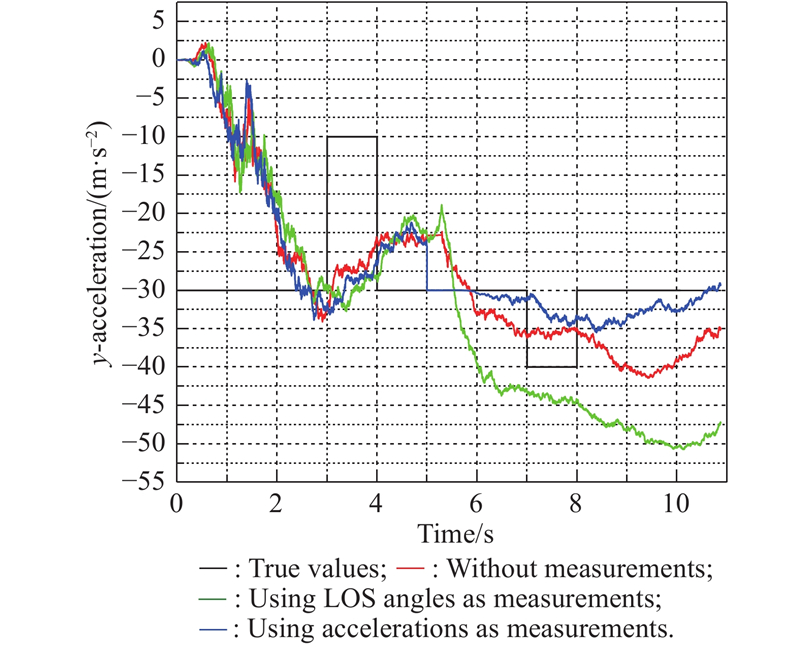
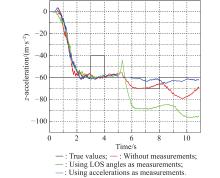
Fig 34
Simulation of ${{{a}}_{{{tz}}}}$ with the singer model "
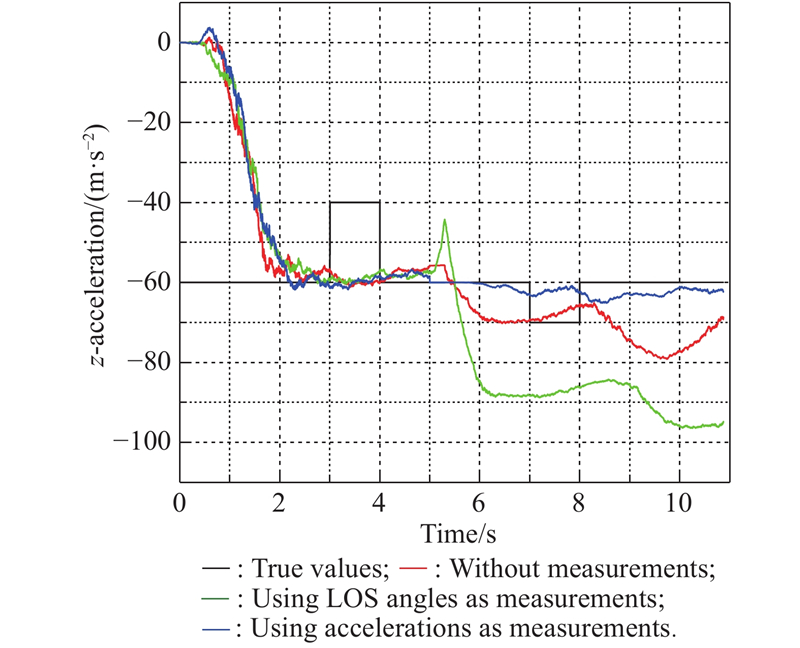
Table 10
Summary of specific data in Figs. 29-34 "
| Figure | | | |||||
| Without measurements | Using LOS angles | Using acceleration | Without measurements | Using LOS angles | Using acceleration | ||
| 29 | 937.927 06 | 1 023.876 41 | 937.927 06 | 1 090.223 | 3 193.21 | 373.043 9 | |
| 30 | 272.223 86 | 321.281 75 | 224.160 68 | 90.5742 | 146.507 3 | 35.287 8 | |
| 31 | 0.002 28 | 0.003 58 | 9.305 73×10?4 | 1.5×10?3 | 7.1×10?4 | 1.0×10?3 | |
| 32 | 0.002 96 | 0.006 68 | 0.002 42 | 0.002 381 | 0.001 121 | 0.002 049 | |
| 33 | 7.357 18 | 10.881 79 | 6.947 11×10?5 | 7.895 29 | 16.783 5 | 2.313 19 | |
| 34 | 4.201 31 | 15.738 14 | 0.002 37 | 11.359 1 | 26.790 2 | 2.437 66 | |
| 1 |
DU X, LV R, TU H F, et al The research on infrared seeker with disturbance rejection effect parasitic. Optik, 2018, 170, 409- 419.
doi: 10.1016/j.ijleo.2018.05.107 |
| 2 |
GAO Q J, WANG J, SUN Q Design of a compact athermalized infrared seeker. Optoelectronics Letters, 2017, 13 (4): 287- 290.
doi: 10.1007/s11801-017-7053-2 |
| 3 | KEIRSTEAD B Infrared search and track systems in modern air combat. Journal of Electronic Defense, 2016, 39 (2): 42- 43. |
| 4 | XIAO L, MO B, LIU F X Line-of-sight stabilization of roll-pitch seeker using differentiator-based disturbance compensation control. Journal of Aerospace Engineering, 2020, 234 (7): 1326- 1339. |
| 5 |
JIANG H H, JIA H G, WEI Q Analysis of zenith pass problem and tracking strategy design for roll-pitch seeker. Aerospace Science and Technology, 2012, 23 (1): 345- 351.
doi: 10.1016/j.ast.2011.08.011 |
| 6 | SONG J M, CAI G H, KONG L X, et al The guidance system design of the semi-strapdown homing guided missile. Journal of Systems and Control Engineering, 2012, 226 (6): 761- 774. |
| 7 | LIU S X. Application of roll-pitch seeker to air-to-air missile guidance system. Beijing, China: Beijing Institute of Technology, 2019. (in Chinese) |
| 8 | BAI R. The key technology of rolling and inverted seeker and its application in air-to-air missile. Beijing, China: Beijing Institute of Technology, 2017. (in Chinese) |
| 9 | WANG X C, MO B, LI X, et al. A line-of-sight rate estimation method for roll-pitch gimballed infrared seeker. Optik, 2019, 192: 162935. DOI: 10.1016/j.ijleo.2019.162935. |
| 10 |
HE S M, WANG W, WANG J Robust finite-time line-of-sight angular rate estimation in missile guidance. Proceedings of the Institution of Mechanical Engineers, 2017, 231 (8): 1550- 1559.
doi: 10.1177/0954410016654178 |
| 11 | CHEN F, HE G J, HE Q F. A composite guidance law for suppressing measurement noise of LOS angular rate. Mathematical Problems in Engineering, 2019, 7453602. DOI: 10.1155/2019/7543602. |
| 12 |
LIU Y W, WANG H X, AN W Hit probability analysis on imaging infrared guidance missile disturbed by laser. Journal of Convergence Information Technology, 2012, 7 (15): 437- 444.
doi: 10.4156/jcit.vol7.issue15.51 |
| 13 | BU C W, LIU G Z, ZHANG X B, et al. Debonding defects detection of FMLs based on long pulsed infrared thermography technique. Infrared Physics & Technology, 2020, 104: 103074. DOI: 10.1016/j.infrared.2019.103074. |
| 14 | WU S J, ZHANG K, NIU S S, et al. Anti-interference aircraft-tracking method in infrared imagery. Sensors, 2019, 19(6): 1289. DOI: 10.3390/s19061289. |
| 15 | LI F G. Engineering application of optimal guidance law and optimal estimate to advanced air-to-air missile. Beijing, China: Beijing Institute of Technology, 2013. (in Chinese) |
| 16 | LI S B, WANG C Z, HUANG H S. Infrared imaging guidance missile’s target recognition simulation based on air-to-air combat. SPIE, 2018, 10846. DOI: 10.1117/12.2505601. |
| 17 | DAI H Y, XU Y L, ZHAO S. Infrared recognition technology and its development trend in the middle segment of ballistic missile. Proc. of the 4th International Conference on Machinery Materials and Information Technology Application, 2016. DOI: 10.2991/icmmita-16.2016.88. |
| 18 |
DU X, XIA Q L The research of guidance performance of the phased array seeker with platform for air-to-air missile. Optik, 2016, 127 (22): 10322- 10334.
doi: 10.1016/j.ijleo.2016.08.071 |
| 19 |
LI M, LI J, ZHOU Y Y Labeled RFS-based track-before-detect for multiple maneuvering targets in the infrared focal plane array. Sensors, 2015, 15 (12): 30839- 30855.
doi: 10.3390/s151229829 |
| 20 |
LONG Y L, XU H, AN W, et al Track-before-detect for infrared maneuvering dim multi-target via MM-PHD. Chinese Journal of Aeronautics, 2012, 25 (2): 252- 261.
doi: 10.1016/S1000-9361(11)60385-3 |
| 21 | GAUDET B, FURFARO R, LINARES R. Reinforcement learning for angle-only intercept guidance of maneuvering targets. Aerospace Science and Technology, 2020, 99: 105746. DOI: 10.1016/j.ast.2020.105746. |
| 22 | HAN Q H, PAN M H, LONG W J, et al. Joint adaptive sampling interval and power allocation for maneuvering target tracking in a multiple opportunistic array radar system. Sensors, 2020, 20(4): 981. DOI: 10.3390/s20040981. |
| 23 |
LIM J C, KIM H S, PARK H M Minimax particle filtering for tracking a highly maneuvering target. International Journal of Robust and Nonlinear Control, 2020, 30 (2): 636- 651.
doi: 10.1002/rnc.4785 |
| 24 |
ZHOU J, LEI H M Coverage-based cooperative target acquisition for hypersonic interceptions. Science China Technological Sciences, 2018, 61 (10): 1575- 1587.
doi: 10.1007/s11431-017-9244-2 |
| 25 |
ZHANG X Y, WANG G H, SONG Z Y, et al Hypersonic sliding target tracking in near space. Defence Technology, 2015, 11 (4): 370- 381.
doi: 10.1016/j.dt.2015.05.004 |
| 26 |
ELBASUNEY S, ELSAIDY A, KASSEM M, et al Infrared signature of novel super-thermite fluorocarbon nanocomposite for effective countermeasures of infrared seekers. Journal of Inorganic and Organometallic Polymers and Materials, 2018, 28 (5): 1718- 1727.
doi: 10.1007/s10904-018-0808-9 |
| 27 | BAE T W, KIM B I, KIM Y C, et al. Corrigendum to “jamming effect analysis of infrared reticle seeker for directed infrared countermeasures”. Infrared Physics and Technology, 2013, 56: 100. DOI: 10.1016/j.infrared.2012.12.013. |
| 28 |
LIANG H Z, WANG J Y, WANG Y H, et al Optimal guidance against active defense ballistic missiles via differential game strategies. Chinese Journal of Aeronautics, 2020, 33 (3): 978- 989.
doi: 10.1016/j.cja.2019.12.009 |
| 29 |
ZHANG R, WANG J W, LI H F, et al Robust finite-time guidance against maneuverable targets with unpredictable evasive strategies. Aerospace Science and Technology, 2018, 77, 534- 544.
doi: 10.1016/j.ast.2018.04.004 |
| 30 |
ABHISHEK G R, PEYADA N K Aircraft parameter estimation using hybrid neuro fuzzy and artificial bee colony optimization (HNFABC) algorithm. Aerospace Science and Technology, 2017, 71, 772- 782.
doi: 10.1016/j.ast.2017.10.030 |
| 31 | SHALUMOV V. Cooperative online guide-launch-guide policy in a target-missile-defender engagement using deep reinforcement learning. Aerospace Science and Technology, 2020, 104: 105996. DOI: 10.1016/j.ast.2020.105996. |
| 32 |
ARUNAVA B, MASHUQ N, RAGHUNATHAN T Time-energy optimal guidance strategy for realistic interceptor using pseudospectral method. Transactions of the Institute of Measurement and Control, 2020, 42 (13): 2361- 2371.
doi: 10.1177/0142331220910919 |
| [1] | Xu LYU, Baiqing HU, Yongbin DAI, Mingfang SUN, Yi LIU, Duanyang GAO. Gaussian process regression-based quaternion unscented Kalman robust filter for integrated SINS/GNSS [J]. Journal of Systems Engineering and Electronics, 2022, 33(5): 1079-1088. |
| [2] | Keyi LI, Zhengkun GUO, Gongjian ZHOU. State estimation in range coordinate using range-only measurements [J]. Journal of Systems Engineering and Electronics, 2022, 33(3): 497-510. |
| [3] | Yue LI, Xianghua WEN, Wei LI, Lan WEI, Qunli XIA. Influence of roll-pitch seeker DRR and parasitic loop on Lyapunov stability of guidance system [J]. Journal of Systems Engineering and Electronics, 2021, 32(6): 1509-1526. |
| [4] | Han PENG, Ting CHENG, Xi LI. De-correlated unbiased sequential filtering based on best unbiased linear estimation for target tracking in Doppler radar [J]. Journal of Systems Engineering and Electronics, 2020, 31(6): 1167-1177. |
| [5] | Di ZHOU, Zhiheng HU, Wenxue ZHANG. Accurate estimation of line-of-sight rate under strong impact interference effect [J]. Journal of Systems Engineering and Electronics, 2020, 31(6): 1262-1273. |
| [6] | Muhammad WASIM, Ahsan ALI. Airship aerodynamic model estimation using unscented Kalman filter [J]. Journal of Systems Engineering and Electronics, 2020, 31(6): 1318-1329. |
| [7] | Yu HUANG, Lihua WU, Qiang YU. Underwater square-root cubature attitude estimator by use of quaternion-vector switching and geomagnetic field tensor [J]. Journal of Systems Engineering and Electronics, 2020, 31(4): 804-814. |
| [8] | Guang ZHAI, Yanxin WANG, Qi ZHAO. Tracking the maneuvering spacecraft propelled by swing propulsion of constant magnitude [J]. Journal of Systems Engineering and Electronics, 2020, 31(2): 370-382. |
| [9] | Mahmoudreza HADAEGH, Hamid KHALOOZADEH. Modified switched IMM estimator based on autoregressive extended Viterbi method for maneuvering target tracking [J]. Journal of Systems Engineering and Electronics, 2018, 29(6): 1142-1157. |
| [10] | Zhongyi CAI, Yunxiang CHEN, Jiansheng GUO, Qiang ZHANG, Huachun XIANG. Remaining lifetime prediction for nonlinear degradation device with random effect [J]. Journal of Systems Engineering and Electronics, 2018, 29(5): 1101-1110. |
| [11] | Jie SHI, Guoqing QI, Yinya LI, Andong SHENG. Stochastic convergence analysis of cubature Kalman filter with intermittent observations [J]. Journal of Systems Engineering and Electronics, 2018, 29(4): 823-833. |
| [12] | Yongfang NIE, Tao ZHANG. Scaling parameters selection principle for the scaled unscented Kalman filter [J]. Journal of Systems Engineering and Electronics, 2018, 29(3): 601-610. |
| [13] | Xiaojun SUN, Guangming YAN. Multi-sensor optimal weighted fusion incremental Kalman smoother [J]. Journal of Systems Engineering and Electronics, 2018, 29(2): 262-268. |
| [14] | Xiaohua Nie and Fuming Zhang. Adaptive tracking algorithm based on 3D variable turn model [J]. Systems Engineering and Electronics, 2017, 28(5): 851-860. |
| [15] | Huaming Qian, Ke Liu, Long Li, Linchen Qian, and Junda Ma. Widely linear UKF constant modulus algorithm for blind adaptive beamforming [J]. Systems Engineering and Electronics, 2017, 28(3): 413-423. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||