Journal of Systems Engineering and Electronics ›› 2023, Vol. 34 ›› Issue (6): 1419-1431.doi: 10.23919/JSEE.2023.000141
-
收稿日期:2022-09-10出版日期:2023-12-18发布日期:2023-12-29
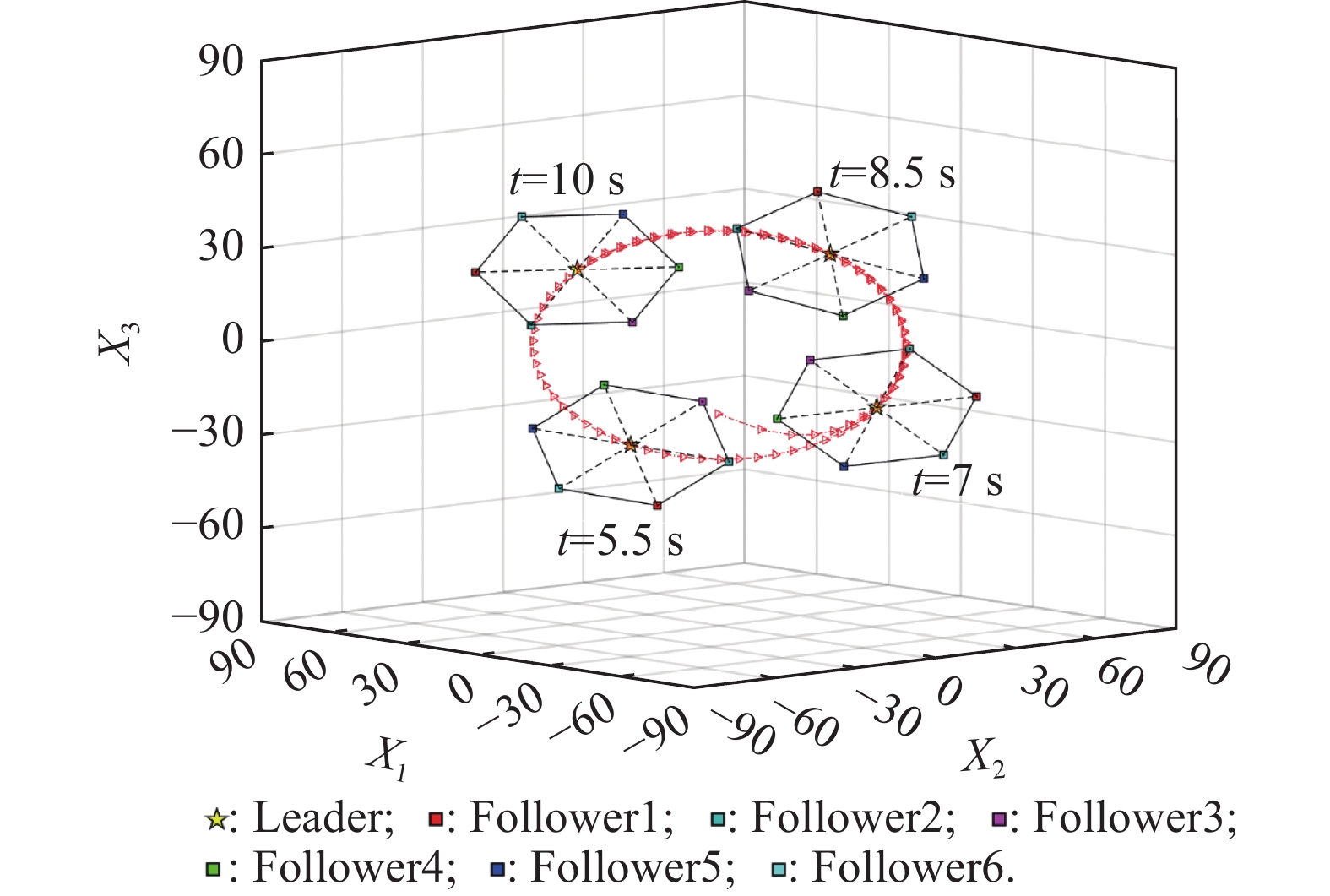
Minimum-energy leader-following formation of distributed multi-agent systems with communication constraints
Donghao QIN( ), Le WANG(), Jiuan GAO(), Jianxiang XI()
), Le WANG(), Jiuan GAO(), Jianxiang XI()
- 1 Rocket Force University of Engineering, Xi’an 710025, China
-
Received:2022-09-10Online:2023-12-18Published:2023-12-29 -
Contact:Jianxiang XI E-mail:42606553@qq.com;wangaz14@163.com;gaojiuan6@126.com;xijx07@mails.tsinghua.edu.cn -
About author:
QIN Donghao was born in 1978. He received his B.S. degree from Taiyuan University of Science and Technology, Taiyuan, China, and M.S. degree from Northwestern Polytechnical University, Xi’an, China, in 2000 and 2010, respectively. He is currently pursuing his Ph.D. degree in control science and engineering from Rocket Force University of Engineering, Xi ’an, China. His research interests include multi-agent systems, optimal control, and formation control. E-mail: 42606553@qq.com
WANG Le was born in 1991. He received his B.S., M.S. and Ph.D. degrees from Rocket Force University of Engineering, Xi’an, China in 2014, 2016, and 2020, respectively. He is currently a lecturer in control science and engineering of Rocket Force University of Engineering, China. His research interests include optimal control, fault tolerant control, and multiagent systems. E-mail: wangaz14@163.com
GAO Jiuan was born in 1990. He received his B. S. and M. S. degrees in Northwestern Polytechnical University, Xi ’an, China in 2011 and 2014, respectively. He is now a lecturer in control science and engineering of Rocket Force University of Engineering. His research interests include swarm systems, and control and navigation for flight vehicle. E-mail: gaojiuan6@126.com
XI Jianxiang was born in 1981. He received his B.S. and M.S. degrees from Rocket Force University of Engineering, Xi ’an, China in 2004 and 2007, respectively. He received his Ph.D. degree in control science and engineering from Rocket Force University of Engineering, Xi’an, China in 2012 by a coalition form with Tsinghua University. He is currently a professor in control science and engineering of Rocket Force University of Engineering, China. His research interests include complex systems control, switched systems and swarm systems. E-mail: xijx07@mails.tsinghua.edu.cn -
Supported by:This work was supported by the National Natural Science Foundation of China (62176263;62103434;62003363), the Science Foundation for Distinguished Youth of Shaanxi Province (2021JC-35), the Youth Talent Promotion Program of Shaanxi Provincial Association for Science and Technology (20220123), the Natural Science Basic Research Program of Shaanxi Province (2022KJXX-99), and the National Defense Basic Research Program of Technology and Industry for National Defense (JCKY2021912B001).
引用本文
. [J]. Journal of Systems Engineering and Electronics, 2023, 34(6): 1419-1431.
Donghao QIN, Le WANG, Jiuan GAO, Jianxiang XI. Minimum-energy leader-following formation of distributed multi-agent systems with communication constraints[J]. Journal of Systems Engineering and Electronics, 2023, 34(6): 1419-1431.

"
"
"
"
"
"
| 1 | PARTOVIBAKHSH M, LIU G J An adaptive unscented Kalman filtering approach for online estimation of model parameters and state-of-charge of lithium-ion batteries for autonomous mobile robots. IEEE Trans. on Automatic Control, 2014, 23 (1): 357- 363. |
| 2 |
KIM C J, CHWA D Obstacle avoidance method for wheeled mobile robots using interval type-2 fuzzy neural network. IEEE Trans. on Fuzzy System, 2015, 23 (3): 677- 687.
doi: 10.1109/TFUZZ.2014.2321771 |
| 3 |
ZHANG D, CAI W J, XIE L H, et al Nonfragile distributed filtering for T-S fuzzy systems in sensor networks. IEEE Trans. on Fuzzy System, 2015, 23 (5): 1883- 1890.
doi: 10.1109/TFUZZ.2014.2367101 |
| 4 |
CHEN S, HO D W C, HUANG C Fault reconstruction and state estimator design for distributed sensor networks in multi target tracking. IEEE Trans. on Industrial Electronics, 2015, 62 (11): 7091- 7102.
doi: 10.1109/TIE.2015.2448685 |
| 5 |
DONG X W, YU B C, SHI Z Y, et al Time-varying formation control for unmanned aerial vehicles: theories and applications. IEEE Trans. on Control Systems Technology, 2015, 23 (1): 340- 348.
doi: 10.1109/TCST.2014.2314460 |
| 6 | QI Y H, ZHOU S L, KANG Y H, et al Formation control for unmanned aerial vehicles with directed and switching topologies. International Journal of Aerospace Engineering, 2016, 2016, 7657452. |
| 7 |
DANG Z H, ZHANG Y L Control design and analysis of an inner-formation flying system. IEEE Trans. on Aerospace and Electronic Systems, 2015, 51 (3): 1621- 1634.
doi: 10.1109/TAES.2014.130263 |
| 8 |
HUANG X L, ZHANG C, LU H Q, et al Adaptive reaching law based sliding mode control for electromagnetic formation flight with input saturation. Journal of the Franklin Institute, 2016, 353 (11): 2398- 2417.
doi: 10.1016/j.jfranklin.2016.04.004 |
| 9 |
WANG L, XI J X, HOU B, et al Limited-budget consensus design and analysis for multiagent systems with switching topologies and intermittent communications. IEEE/CAA Journal of Automatica Sinica, 2021, 8 (10): 1724- 1736.
doi: 10.1109/JAS.2021.1004000 |
| 10 |
ABBSL Y, MOOSAVIAN S A A, NOVINZADEH A B Formation control of aerial robots using virtual structure and new fuzzy based self-tuning synchronization. Transactions of the Institute Measurement and Control, 2017, 39 (12): 1906- 1919.
doi: 10.1177/0142331216649021 |
| 11 |
BALCH T, ARKIN R C Behavior-based formation control for multirobot teams. IEEE Trans. on Robot Automatic, 1998, 14 (6): 926- 939.
doi: 10.1109/70.736776 |
| 12 | LIN J L, HWANG K S, WANG Y L, et al A simple scheme for formation control based on weighted behavior learning. IEEE Trans. on Neural Networks and Learning Systems, 2013, 25 (6): 1033- 1044. |
| 13 | LORIA A, DASDEMIR J, JARQUIN N A Leader-follower formation and tracking control of mobile robots along straight paths. IEEE Trans. on Control Systems Technology, 2015, 24 (2): 727- 732. |
| 14 |
YANG X J, LIAO L J, YANG Q, et al Limited-energy output formation for multiagent systems with intermittent interactions. Journal of the Franklin Institute, 2021, 358 (13): 6462- 6489.
doi: 10.1016/j.jfranklin.2021.06.009 |
| 15 |
LI J L, XI J X, HE M, et al Formation control for networked multiagent systems with a minimum energy constraint. Chinese Journal of Aeronautics, 2023, 36 (1): 342- 355.
doi: 10.1016/j.cja.2022.01.015 |
| 16 |
REN W Consensus strategies for cooperative control of vehicle formations. IET Control Theory Application, 2007, 1 (2): 505- 512.
doi: 10.1049/iet-cta:20050401 |
| 17 |
ANDERSSON M, WALLANDER J Kin selection and reciprocity in flight formation. Behavioral Ecology, 2004, 15 (1): 158- 162.
doi: 10.1093/beheco/arg109 |
| 18 |
REN W, SORENSEN N Distributed coordination architecture for multirobot formation control. Robotics and Autonomous Systems, 2008, 56 (4): 324- 333.
doi: 10.1016/j.robot.2007.08.005 |
| 19 |
BRINON-ARRANZ L, SEURET A, CANUDAS-DE-WIT C Cooperative control design for time-varying formations of multi-agent systems. IEEE Trans. on Automatic Control, 2014, 59 (8): 2283- 2288.
doi: 10.1109/TAC.2014.2303213 |
| 20 |
YOO S J, KIM T H Distributed formation tracking of networked mobile robots under unknown slippage effects. Automatica, 2015, 54, 100- 106.
doi: 10.1016/j.automatica.2015.01.043 |
| 21 | YAN C H, ZHANG W, LI X H, et al Observer-based time-varying formation tracking for one-sided Lipschitz nonlinear systems via adaptive protocol. International Journal of Control Automation and Systems, 2020, 18 (12): 2753- 2764. |
| 22 |
LIU X F, XIE Y F, LI F B, et al Formation control of singular multiagent systems with switching topologies. International Journal of Robust Nonlinear Control, 2020, 30 (2): 652- 664.
doi: 10.1002/rnc.4789 |
| 23 |
XI J X, WANG L, ZHENG J F, et al Energy-constraint formation for multiagent systems with switching interaction topologies. IEEE Trans. on Circuits and Systems-I: Regular papers, 2020, 67 (7): 2442- 2454.
doi: 10.1109/TCSI.2020.2975383 |
| 24 | YANG X, HUA C C, YAN J, et al Adaptive formation control of cooperative teleoperators with intermittent communications. IEEE Trans. on Cybernetics, 2018, 49 (7): 2514- 2523. |
| 25 | CHAI X F, LIU J, YU Y, et al Practical fixed-time event-triggered time-varying formation tracking control for disturbed multi-agent systems with continuous communication free. Unmanned Systems, 2021, 9 (1): 1- 12. |
| 26 |
CAO Y C, REN W Optimal linear-consensus algorithms: an LQR perspective. IEEE Trans. on Systems, Man, and Cybernetics-Part B:Cybernetics, 2010, 40 (3): 819- 829.
doi: 10.1109/TSMCB.2009.2030495 |
| 27 |
ZHAO Y D, ZHANG W D Guaranteed cost consensus protocol design for linear multi-agent systems with sampled-data information: an input delay approach. ISA Transactions, 2017, 67, 87- 97.
doi: 10.1016/j.isatra.2016.12.003 |
| 28 |
WANG Z, HE M, ZHENG T, et al Guaranteed cost consensus for high-dimensional multi-agent systems with time-varying delays. IEEE/CAA Journal of Automatica Sinica, 2018, 5 (1): 181- 189.
doi: 10.1109/JAS.2017.7510430 |
| 29 |
YU J L, DONG X W, LI Q D, et al Robust guaranteed cost time-varying formation tracking for high-order multiagent systems with time-varying delays. IEEE Trans. on Systems Man Cybernetics: Systems, 2020, 50 (4): 1465- 1475.
doi: 10.1109/TSMC.2018.2883516 |
| 30 |
XI J X, WANG C, YANG X J, et al Limited-budget output consensus for descriptor multiagent systems with energy constraints. IEEE Trans. on Cybernetics, 2020, 50 (11): 4585- 4598.
doi: 10.1109/TCYB.2019.2963172 |
| 31 | GODSIL C, ROYLE G. Algebraic graph theory. New York: Springer-Verlag, 2001. |
| 32 | YU W W, CAO J D, WANG J An LMI approach to global asymptotic stability of the delayed Cohen-Grossberg neural network via nonsmooth analysis. Neural Networks, 2007, 20 (7): 810- 818. |
| 33 | ANDERSON B D O, MOORE J B. Optimal control: linear quadratic methods. New York: Dover publications, 2007. |
| 34 | LIN Z Y, DING W, YAN G F, et al. Leader-follower formation via complex Laplacian. Automatica, 2013, 49(6): 1900−1906. |
| 35 |
DONG X W, ZHOU Y, REN Z, et al Time-varying formation tracking for second-order multi-agent systems subjected to switching topologies with application to quadrotor formation flying. IEEE Trans. on Industrial Electronics, 2017, 64 (6): 5014- 5024.
doi: 10.1109/TIE.2016.2593656 |
| 36 | WANG J N, XIN M. Integrated optimal formation control of multiple unmanned aerial vehicles. IEEE Trans. on Control Systems Technology, 2013, 21(5): 1731−1744. |
| 37 | WANG J N, BI C Y, WANG D D, et al. Finite-time distributed event-triggered formation control for quadrotor UAVs with experimentation. ISA Transactions, 2022, 126: 585−596. |
| No related articles found! |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||