Journal of Systems Engineering and Electronics ›› 2023, Vol. 34 ›› Issue (5): 1294-1308.doi: 10.23919/JSEE.2023.000079
-
收稿日期:2021-12-27出版日期:2023-10-18发布日期:2023-10-30
Leader trajectory planning method considering constraints of formation controller
Dongdong YAO1( ), Xiaofang WANG1,*(), Hai LIN1(), Zhuping WANG2()
), Xiaofang WANG1,*(), Hai LIN1(), Zhuping WANG2()
- 1 School of Aerospace Engineering, Beijing Institute of Technology, Beijing, 100081, China
2 Xi’an Institute of Electromechanical Information Technology, Xi’an, 710065, China
-
Received:2021-12-27Online:2023-10-18Published:2023-10-30 -
Contact:Xiaofang WANG E-mail:3120205027@bit.edu.cn;wangxf@bit.edu.cn;flight@bit.edu.cn;2799410606@qq.com -
About author:
YAO Dongdong was born in 1993. He received his Master’s degree from Beijing Institute of Technology in 2020. He is a doctoral student in School of Aerospace Engineering, Beijing Institute of Technology. His main research interests include flight vehicle guidance and control. E-mail: 3120205027@bit.edu.cn
WANG Xiaofang was born in 1979. She received her Ph.D. degree from Beijing Institute of Technology in 2006. She is an associate professor in School of Aerospace Engineering, Beijing Institute of Technology. Her main research interests include cooperative guidance and control of multiple aircraft, flight dynamics, and flight vehicle design. E-mail: wangxf@bit.edu.cn
LIN Hai was born in 1967. He received his Ph.D. degree from Beijing Institute of Technology in 2000. He is a professor in Beijing Institute of Technology. His main research interests include flight dynamics and flight vehicle design. E-mail: flight@bit.edu.cn
WANG Zhuping was born in 1980. She received her Master’s degree from Xi’an Technological University in 2004. She is a senior engineer in Xi’an Institute of Electromechanical Information Technology. Her main research interests include flight vehicle electromechanical design. E-mail: 2799410606@qq.com -
Supported by:This work was supported by the National Natural Science Foundation of China (11502019)
引用本文
. [J]. Journal of Systems Engineering and Electronics, 2023, 34(5): 1294-1308.
Dongdong YAO, Xiaofang WANG, Hai LIN, Zhuping WANG. Leader trajectory planning method considering constraints of formation controller[J]. Journal of Systems Engineering and Electronics, 2023, 34(5): 1294-1308.
"

"
"
"

"
"
"
"

"
"
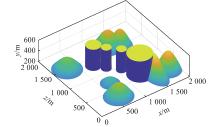
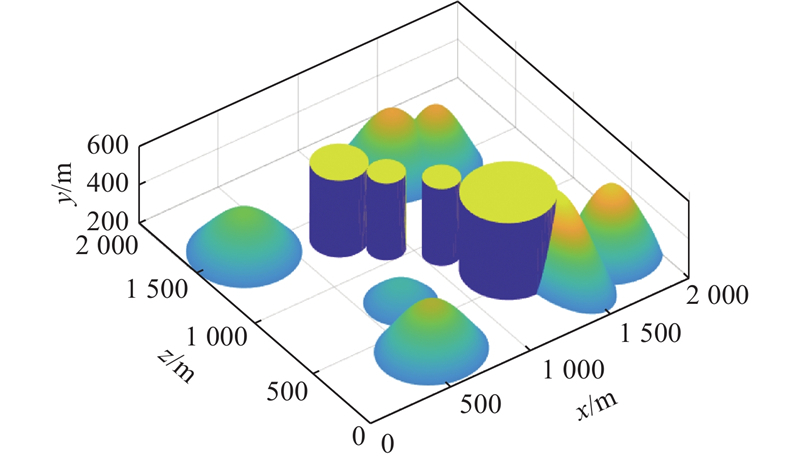
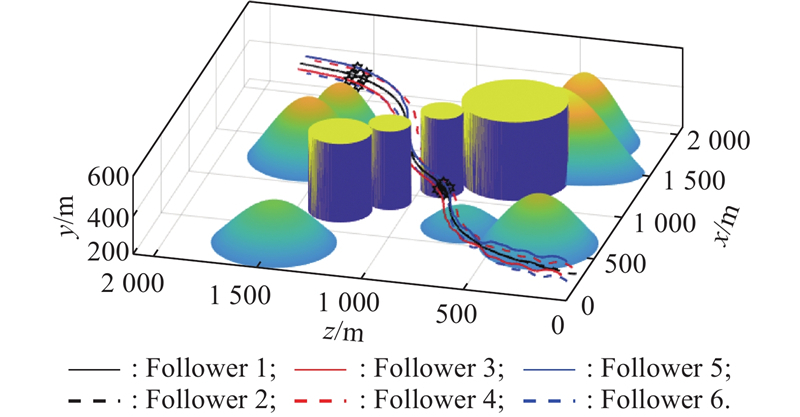
| Type | x | z | Height | Radius |
| Peak | 700 | 700 | 300 | (300,300) |
| 1500 | 300 | 350 | (350,350) | |
| 300 | 600 | 310 | (310,330) | |
| 1600 | 1300 | 300 | (300,300) | |
| 1500 | 1500 | 250 | (250,250) | |
| 400 | 1800 | 260 | (260,260) | |
| 450 | 1500 | 400 | (400,200) | |
| Cylinder | 1100 | 900 | 600 | 100 |
| 900 | 1100 | 600 | 100 | |
| 1300 | 600 | 600 | 250 | |
| 750 | 1300 | 600 | 150 |
"
"
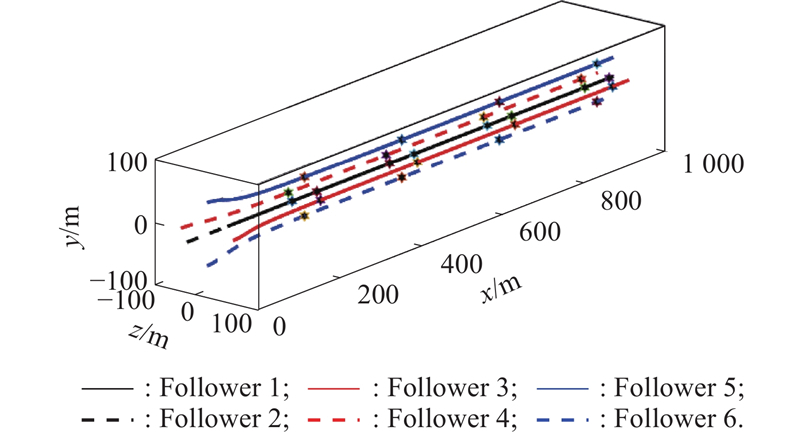
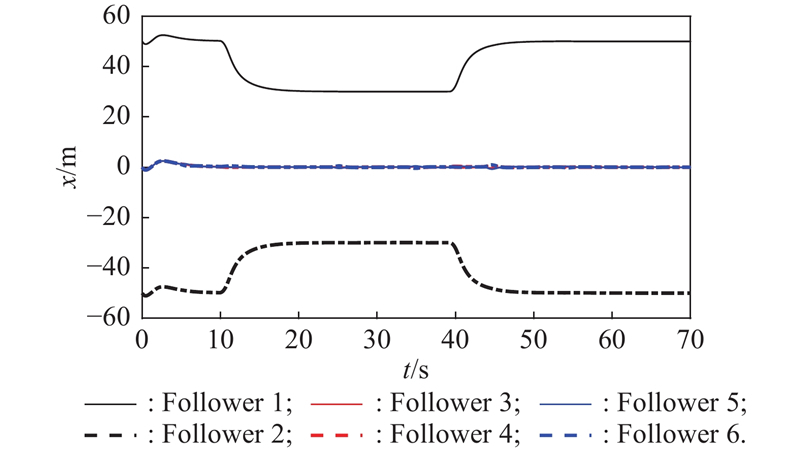
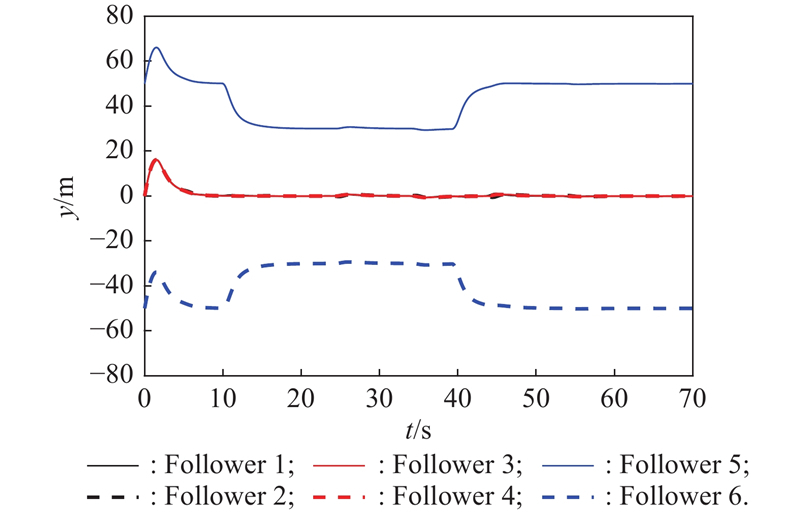
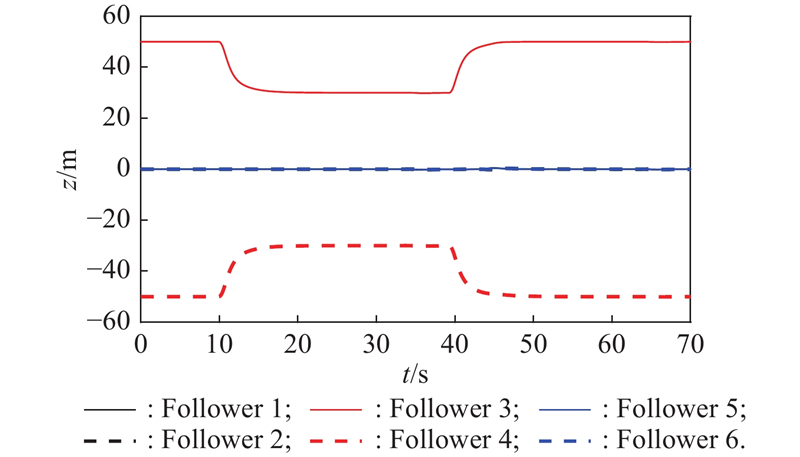
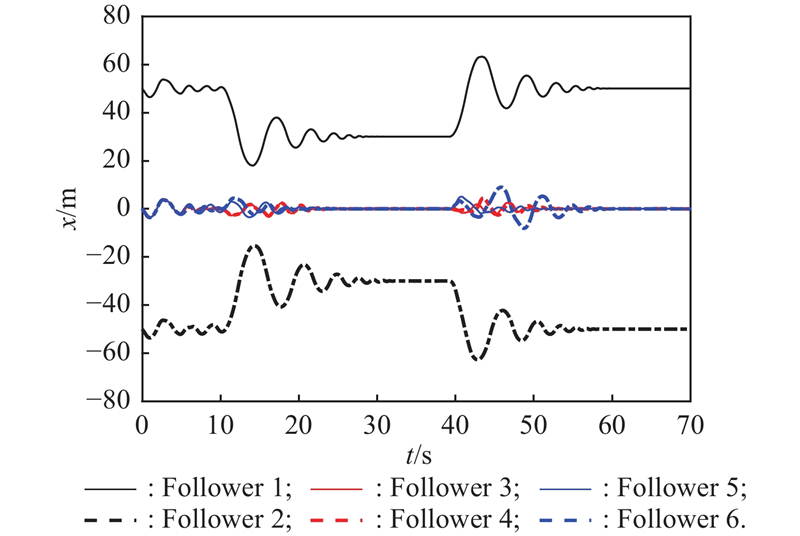
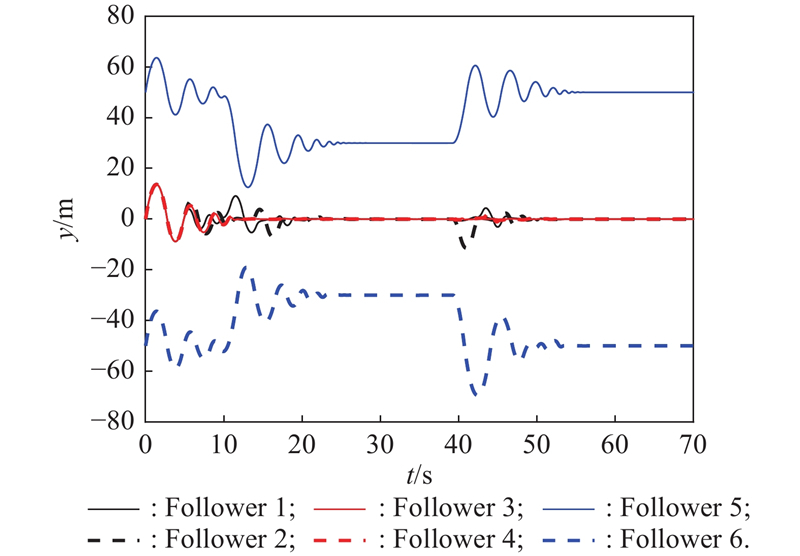
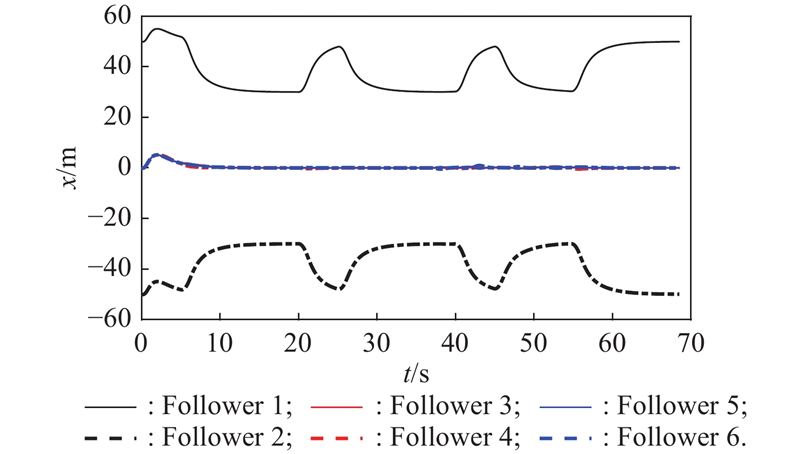
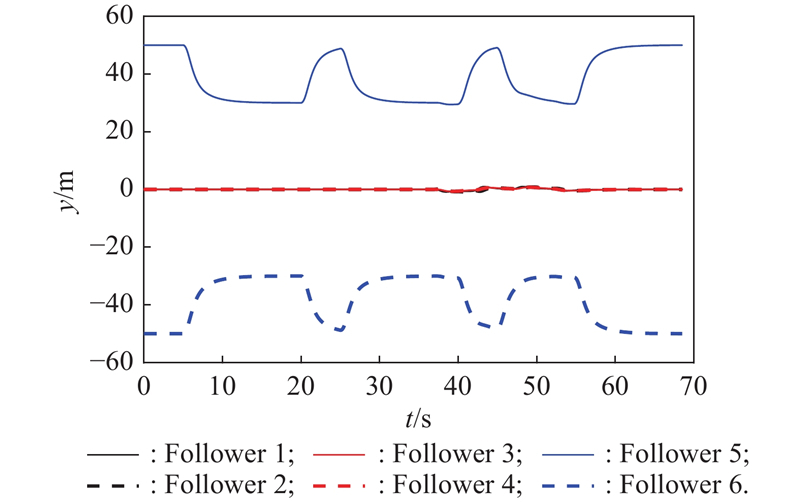
| Follower | Formation 1 | Formation 2 | |||||
| | | | | | | ||
| 1 | 50 | 0 | 0 | 30 | 0 | 0 | |
| 2 | −50 | 0 | 0 | −30 | 0 | 0 | |
| 3 | 0 | 50 | 0 | 0 | 30 | 0 | |
| 4 | 0 | −50 | 0 | 0 | −30 | 0 | |
| 5 | 0 | 0 | 50 | 0 | 0 | 30 | |
| 6 | 0 | 0 | −50 | 0 | 0 | −30 | |
"
"
"
"
"
"
"
"
"
"
"
"
"
"
"
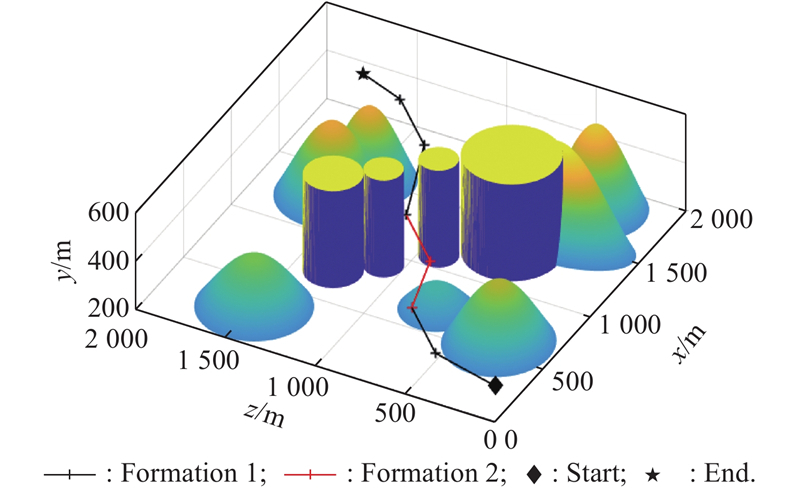
| Point | | | | |
| Start | 0 | 350 | 0 | 40 |
| End | 2000 | 350 | 1800 | 40 |
"
"
"
"
"
"
"
"
"
"
"
"
"
"
| 18 | DEHGHANI M A, MENHAJ M B, Integral sliding mode formation control of fixed-wing unmanned aircraft using seeker as a relative measurement system. Aerospace Science & Technology, 2016, 58: 318−327. |
| 19 |
ANTONIO V T J, ADRIEN G, MANUEL A M Event-triggered leader-following formation control for multi-agent systems under communication faults: application to a fleet of unmanned aerial vehicles. Journal of Systems Engineering and Electronics, 2021, 32 (5): 1014- 1022.
doi: 10.23919/JSEE.2021.000086 |
| 20 | TREJO J A V, GUENARD A, ADAM-MEDINA M. Formation control of leader-follower UAV based on the behavior of geese swarm. Control Engineering of China, 2022. DOI: 10.14107/j.cnki.kzgc.20200927. (in Chinese) |
| 21 | ZHAO Q, ZHEN Z Y. UAV formation control based on dueling double DQN . Journal of Beijing University of Aeronautics and Astronautics, 2022. DOI:10.13700/j.bh.1001-5965.2021.0601. (in Chinese) |
| 22 | ZHAO H W, YANG X X, SHRN R S, et al Prescribed performance fine attitude control for aeroelastic hypersonic vehicle. Acta Armamentarii, 2017, 38 (3): 501- 511. |
| 23 | ELHAKI O, SHOJAEI K. Trajectory tracking control of underactuated autonomous marine surface vessels with guaranteed prescribed performance. Proc. of the 6th RSI International Conference on Robotics and Mechatronics, 2018: 22–27. |
| 24 | ASL H J, NARIKIYO T, KAWANISHI M. Prescribed performance velocity field control of robotic exoskeletons with neural network. Proc. of the IEEE International Conference on Robotics and Biomimetics, 2017: 2704–2709. |
| 25 | KOSTARIGKA A K, DOULGERI Z, ROVITHAKIS G A. Prescribed performance tracking for flexible joint robots with unknown dynamics and elasticity. Proc. of the IEEE International Conference on Robotics and Automation, 2012: 5365–5370. |
| 26 |
ZHAO S Y, LI X B Prescribed performance fault tolerant control for hypersonic flight vehicles with actuator failures. IEEE Access, 2019, 7, 100187- 100204.
doi: 10.1109/ACCESS.2019.2930658 |
| 27 |
ZHANG Y, WANG S H, CHANG B Adaptive constrained backstepping controller with prescribed performance methodology for carrier-based UAV. Aerospace Science and Technology, 2019, 92, 55- 65.
doi: 10.1016/j.ast.2019.05.032 |
| 28 |
YANG M, LI G M, WANG S Y Prescribed performance control scheme for fixed trim reentry vehicle with actuator input and power constraints. Aerospace Science and Technology, 2020, 104, 105972.
doi: 10.1016/j.ast.2020.105972 |
| 29 | LIU D. Research on multi-missile cooperative guidance and control technology. Beijing: Beijing Institution of Technology, 2016. (in Chinese) |
| 30 | ZAFAR K, BAIG A R, BADAR S. Multi agent based mine detection and route planning using learning real time ${\rm{A}}^* $ algorithm. Proc. of the IEEE International Conference on Computer Science and ITS Applications, 2010. DOI: 10.1109/CSA.2009.5404275. |
| 1 | JIANG Y Y, GAO Y, SONG W Q, et al Bibliometric analysis of UAV swarms. Journal of Systems Engineering and Electronics, 2022, 33 (2): 406- 425. |
| 2 | XU Y, ZHENG W M, LUO D L, et al Dynamic affine formation control of networked under-actuated quad-rotor UAVs with three-dimensional patterns. Journal of Systems Engineering and Electronics, 2022, 33 (6): 1269- 1285. |
| 3 | ZHOU Y M, SU Y, XIE A H, et al A newly bio-inspired path planning algorithm for autonomous obstacle avoidance of UAV. Chinese Journal of Aeronautics, 2021, 34 (9): 199- 209. |
| 4 |
GU J C, DING G R, XU Y T, et al Proactive optimization of transmission power and 3D trajectory in UAV-assisted relay systems with mobile ground users. Chinese Journal of Aeronautics, 2021, 34 (3): 129- 144.
doi: 10.1016/j.cja.2020.09.028 |
| 5 | YIN G Y, ZHOU S L. Cooperative path planning of multi-missiles. Proc. of the IEEE Chinese Guidance, Navigation and Control Conference, 2014: 767–772. |
| 6 | YANG X X, ZHOU W W, ZHANG Y. On collaborative path planning for multiple UAVs based on Pythagorean hodograph curve. Proc. of the IEEE Chinese Guidance, Navigation and Control Conference, 2016: 971–975. |
| 7 | ZHANG Y A, ZHANG Y. Impact time and impact angle control based on CCC path planning. Proc. of the 31st Chinese Control Conference, 2012: 4300–4305. |
| 8 | LIU W, ZHENG Z, CAI K Y. Distributed on-line path planner for multi-UAV coordination using bi-level programming. Proc. of the 25th Chinese Control and Decision Conference, 2013: 5128–5133. |
| 9 | WOLFE J D , CHICHKA D F , SPEYER J L. Decentralized controllers for unmanned aerial vehicle formation flight. Proc. of the AIAA GNC Conference, 1996. DOI: 10.2514/6.1996-3833. |
| 10 | SHAO Z. Research on Technologies of Path planning and formation control for multi-UAVs formation. Xi’an: Northwestern Polytechnical University, 2017. (in Chinese) |
| 11 | BELKACEM K, MUNAWAR K, MUHAMMAD S S Distributed cooperative control of autonomous multi-agent UAV systems using smooth control. Journal of Systems Engineering and Electronics, 2020, 31 (6): 1297- 1307. |
| 12 |
LIANG Y Q, DONG Q, ZHAO Y J Adaptive leader-follower formation control for swarms of unmanned aerial vehicles with motion constraints and unknown disturbances. Chinese Journal of Aeronautics, 2020, 33 (11): 2972- 2988.
doi: 10.1016/j.cja.2020.03.020 |
| 13 |
ZHOU P P, CHEN B M Semi-global leader-following consensus-based formation flight of unmanned aerial vehicles. Chinese Journal of Aeronautics, 2022, 35 (1): 31- 43.
doi: 10.1016/j.cja.2021.02.013 |
| 14 |
CAI Z H, WANG L H, ZHAO J Virtual target guidance-based distributed model predictive control for formation control of multiple UAVs. Chinese Journal of Aeronautics, 2020, 33 (3): 1037- 1056.
doi: 10.1016/j.cja.2019.07.016 |
| 15 | WANG X. Formation flying technology of UAV. Xi’an: Northwestern Polytechnical University Press, 2015. (in Chinese) |
| 16 | LIU W, WU Q P, ZHOU S L. Leader-follower consensus control of multi-agent systems with extended Laplacian matrix. Proc. of the 27th Chinese Control and Decision Conference, 2015: 5393–5397. |
| 17 | DEHGHANI M A, MENHAJ M B Communication free leader–follower formation control of unmanned aircraft systems. Robotics & Autonomous Systems, 2016, 80, 69- 75. |
| No related articles found! |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||