Journal of Systems Engineering and Electronics ›› 2022, Vol. 33 ›› Issue (6): 1190-1207.doi: 10.23919/JSEE.2022.000142
• • 上一篇
-
收稿日期:2021-03-15出版日期:2022-12-18发布日期:2022-12-24
A multiple heterogeneous UAVs reconnaissance mission planning and re-planning algorithm
Lei HU1( ), Boqi XI1(), Guoxing YI1,*(), Hui ZHAO1(), Jiapeng ZHONG2()
), Boqi XI1(), Guoxing YI1,*(), Hui ZHAO1(), Jiapeng ZHONG2()
- 1 School of Astronautics, Harbin Institute of Technology, Harbin 150000, China
2 HIT (Anshan) Institute of Industrial Technology, Harbin Institute of Technology, Anshan 114000, China
-
Received:2021-03-15Online:2022-12-18Published:2022-12-24 -
Contact:Guoxing YI E-mail:maple_hsjz@163.com;xiboqi@163.com;ygx@hit.edu.cn;zhaohui@hit.edu.cn;zhong-j-p@163.com -
About author:
HU Lei was born in 1993. He received his M.S. degree from Harbin Institute of Technology in 2018. He is pursuing his Ph.D. degree in Harbin Institute of Technology. His research interests include weapon system combat effectiveness and decision-making. E-mail: maple_hsjz@163.com
XI Boqi was born in 1978. He received his Ph.D. degree from Harbin Institute of Technology, Harbin, China. He is an associate professor in Harbin Institute of Technology. His research interests include the mechanism and application of hemispherical resonance gyro, and the research of inertial and integrated navigation. E-mail: xiboqi@163.com
YI Guoxing was born in 1974. He received his Ph.D. degree from Harbin Institute of Technology, Harbin, China. He is a professor in Harbin Institute of Technology. His research interests include UAV system and application technology, the mechanism and application of hemispherical resonance gyro, and the research of inertial and integrated navigation. E-mail: ygx@hit.edu.cn
ZHAO Hui was born in 1971. He received his Ph.D. degree from Harbin Institute of Technology, Harbin, China. He is a professor in Harbin Institute of Technology. His research intesests include electric drive and high-performance servo drive control, and driving and control of ultrasonic actuator. E-mail: zhaohui@hit.edu.cn
ZHONG Jiapeng was born in 1986. He received his Ph.D. degree from Harbin Institute of Technology, Harbin, China in 2016. He is an engineer in Industrial Technology Research Institute of Harbin Institute of Technology (Anshan). His research interests include UAV system and application technology, the mechanism and application of hemispherical resonance gyro, and the research of inertial and integrated navigation. E-mail: zhong-j-p@163.com
引用本文
. [J]. Journal of Systems Engineering and Electronics, 2022, 33(6): 1190-1207.
Lei HU, Boqi XI, Guoxing YI, Hui ZHAO, Jiapeng ZHONG. A multiple heterogeneous UAVs reconnaissance mission planning and re-planning algorithm[J]. Journal of Systems Engineering and Electronics, 2022, 33(6): 1190-1207.
"
| Parameter | Definition | Parameter | Definition | |
| | Time | | Velocity of UAV i | |
| | Type of UAV sensor, type of targets | | Minimum turning radius of UAVi | |
| | Number of all targets in mission area | | Dubins path of any two points | |
| | Number of UAVs | | Number of targets visited by UAV i | |
| | Maximum voyage of UAV i | | Number of nodes visited by UAV i | |
| | Indicator function, sensor type loaded in UAV i | | PDM of reconnaissance mission corresponding to UAVi | |
| | Indicator function, the type of target j | | Decision vector of UAV i | |
| | Indicator function, whether the target j can be detected by UAVi | | Voyage distance cost function of UAV i | |
| | Indicator function, whether the target j is detected by UAV i | | Total voyage distance cost function of UAVs | |
| | Indicator function, the healthy state of UAV i at time | | Sampling number | |
| K | K sub-missions | PDM | Probability density matrix |
"

"

"
"
"


"
"
| Parameter | Shape | ||||
| Square | Hexagons | Triangle | Diamond | Star | |
| Target type | a | b | c | d | e |
"
| UAV | Loaded sensors | Maximum voyage/km | Flight velocity/(m·s−1) | Minimum turning radius/m |
| UAV 1 | a, b, c | 210 | 180 | 760 |
| UAV 2 | b, c, d | 180 | 200 | 800 |
| UAV 3 | a, b, c, d | 220 | 165 | 700 |
| UAV 4 | b, c, d, e | 200 | 170 | 700 |
| UAV 5 | a, c, e | 180 | 210 | 820 |
| UAV 6 | c, d, e | 210 | 190 | 780 |
| UAV 7 | a, b, c, d, e | 230 | 150 | 660 |
"
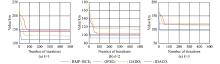
| Method | Parameter | Parameter setting rule |
| RMP-ISCE | Ns | 200 |
| | 0.4 | |
| T | 500 | |
| OPSO, GADO, IDACO | Num | 200 |
| D | 500 | |
| MC | NMC | |
"

"
"
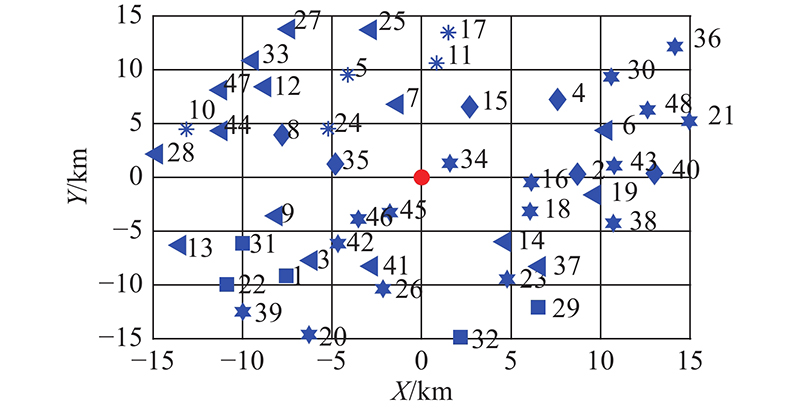
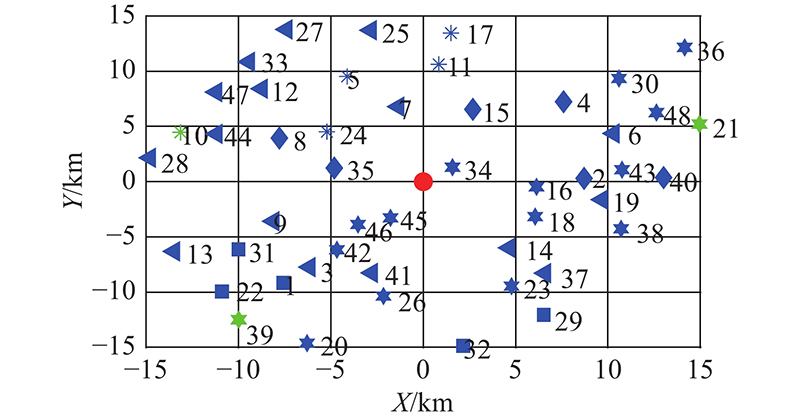
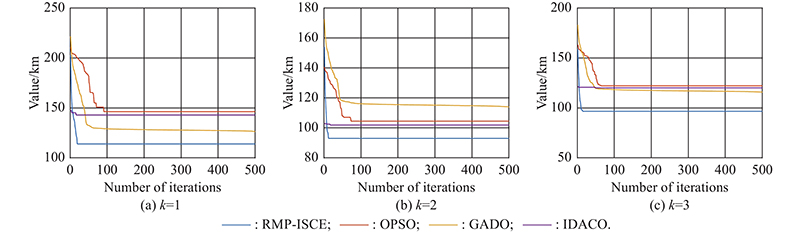
| Parameter | Submission area | ||
| 1 | 2 | 3 | |
| Number of targets | 18 | 15 | 15 |
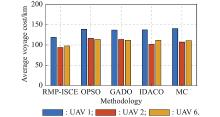
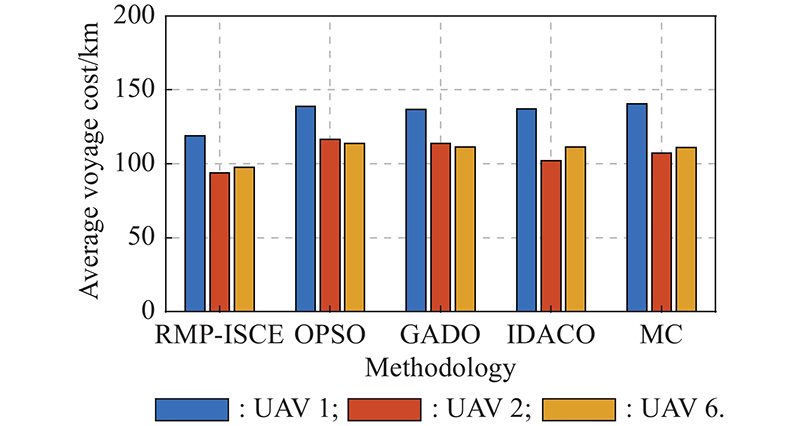
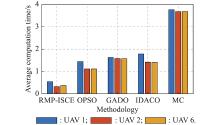
| UAV code | UAV 1 | UAV 2 | UAV 6 |
"
"
"

"
"
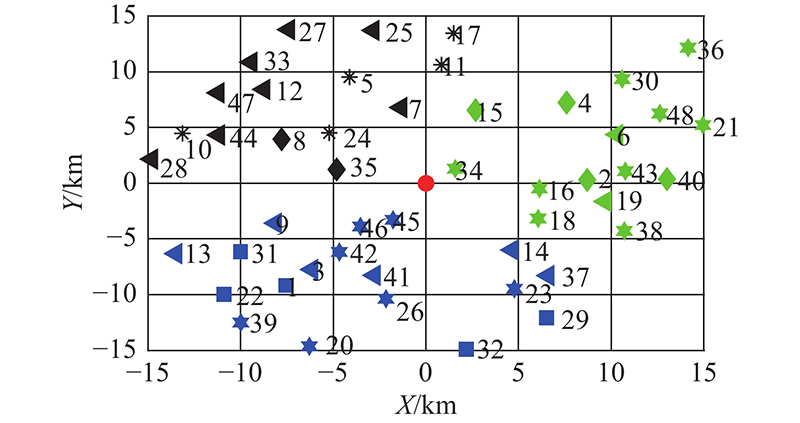
| UAV serial number | Time/s | Healthy state | Remaining target | Re-assignment |
| UAV 1 | − | Healthy | 22,1,31,9,3,26,42,41,46,45 | 18 |
| UAV 2 | 354 | Damaged | 19,18 | − |
| UAV 6 | − | Healthy | 25,17,11,7 | 19 |
"
| UAV serial number | Before/km | After/km | Total voyage distance/km |
| UAV1 | 63.72 | 75.44 | 139.16 |
| UAV2 | 70.8 | − | 70.8 |
| UAV6 | 67.26 | 58.2 | 125.46 |
"
"

"
| 44 | HU L, YI G X, HUANG C, et al Research on dynamic weapon target assignment based on cross-entropy. Mathematical Problems in Engineering, 2020, 2020, 8618065. |
| 1 | HADDON D R, WHITTAKER C J Office of the secretary of defense, unmanned aircraft systems roadmap. Implementation of Network, 2005, 8 (14): 263- 278. |
| 2 | JIA G W, WANG J F Research review of UAV swarm mission planning method. Journal of Systems Engineering and Electronics, 2021, 43 (1): 99- 111. |
| 3 | JOSHUA A L. Network level control of collaborative UAVs. California, USA: University of California, 2011. |
| 4 | MA C Y, FENG Z Q, ZHENG X M Development of bionic UAVs cluster technology. Transactions of Nanjing University of Aeronautics and Astronautics, 2018, 35 (1): 1- 8. |
| 5 | KHAN A, AFTAB F, ZHANG Z S UAPM: an urgency-aware packet management for disaster management using flying ad-hoc networks. China Communications, 2019, 16 (11): 167- 182. |
| 6 |
ZAFAR Z, AWAIS M, JALEEL A, et al A distributed framework of autonomous drones for planning and execution of relief operations during flood situations. International Arab Journal of Information Technology, 2020, 18 (1): 16- 24.
doi: 10.34028/iajit/18/1/3 |
| 7 |
VIDAL T, CRAINIC T G, GENDREAU M A hybrid genetic algorithm for multi-depot and periodic vehicle routing problems. Operations Research, 2012, 60 (3): 611- 624.
doi: 10.1287/opre.1120.1048 |
| 8 | CRISTIAN R A, JAVIER D S, DAVID C Weighted strategies to guide a multi-objective evolutionary algorithm for multi-UAV mission planning. Swarm & Evolutionary Computation, 2019, 44, 480- 495. |
| 9 |
THIBBOTUWAWA A, BOCEWICZ, G RADZKI G, et al UAV mission planning resistant to weather uncertainty. Sensors, 2020, 20 (2): 31963338.
doi: 10.3390/s20020515 |
| 10 | KURDI H A, EBTESAM A, MARAM A, et al Autonomous mission allocation for multi-UAV systems based on the locust elastic behavior. Applied Soft Computing, 2018, 71, 110- 126. |
| 11 |
MOTLAGH N H, BAGAA M, TALEB T Energy and delay aware mission assignment mechanism for UAV-based IoT platform. IEEE Internet of Things Journal, 2019, 6 (4): 6523- 6536.
doi: 10.1109/JIOT.2019.2907873 |
| 12 | OH G, KIM Y, AHN J Market-based mission assignment for cooperative timing missions in dynamic environments. Journal of Intelligent & Robotic Systems, 2017, 87 (1): 97- 123. |
| 13 |
CHEN H X, NAN Y, YANG Y Multi-UAV reconnaissance mission assignment for heterogeneous targets based on modified symbiotic organisms search algorithm. Sensors, 2019, 19 (3): 734- 754.
doi: 10.3390/s19030734 |
| 14 | GRIPPA P Decision making in a UAV-based delivery system with impatient customers. Proc. of the IEEE/RSJ International Conference on Intelligent Robots & Systems, 2016, 5034- 5039. |
| 15 |
PADILLA G E G, KIM K J, PARK S H Flight path planning of solar-powered UAV for sustainable communication relay. IEEE Robotics and Automation Letters, 2020, 5 (4): 6772- 6779.
doi: 10.1109/LRA.2020.3014635 |
| 16 |
YAO P, XIE Z X, REN P Optimal UAV route planning for coverage search of stationary target in river. IEEE Trans. on Control Systems Technology, 2019, 27 (2): 822- 829.
doi: 10.1109/TCST.2017.2781655 |
| 17 |
MURRAY C, KARWAN M A branch-and-bound-based solution approach for dynamic rerouting of airborne platforms. Naval Research Logistics, 2013, 60 (2): 141- 159.
doi: 10.1002/nav.21526 |
| 18 | HUANG C Q, ZHAO K X, HAN B J, et al Maneuvering decision-making method of UAV based on approximate dynamic programming. Journal of Electronics & Information Technology, 2018, 40 (10): 2447- 2452. |
| 19 | LIN C E, SYU Y M GA/DP hybrid solution for UAV multi-target path planning. Journal of Aeronautics Astronautics and Aviation, 2016, 48 (3): 203- 220. |
| 20 | PONDA S S, JOHNSON L B, GERAMIFARD A, et al Cooperative mission planning for multi-UAV teams. Handbook of Unmanned Aerial Vehicles, Dordrechit: Spring, 2015. |
| 21 | ZHEN Z, XING D J, GAO C Cooperative search-attack mission planning for multi-UAV based on intelligent self-organized algorithm. Aerospace Science & Technology, 2018, 76, 402- 411. |
| 22 | KIVANC O C An approach to improve the performance of cooperative unmanned vehicle team. Turkish Journal of Electrical Engineering & Computer Sciences, 2019, 27 (2): 1428- 1444. |
| 23 | HU C Y, LIU W D, YU T X, et al Analysis of multi task planning model based on UAV real-time data. Journal of Systems Engineering and Electronics, 2021, 43 (3): 747- 754. |
| 24 | PENG Y F, YU Q, LI Q Y Method of multi-object equipment support task planning based on improved particle swarm optimization. Journal of Systems Engineering and Electronics, 2017, 39 (3): 562- 568. |
| 25 |
GOEZ G D, VELEZ R A V, VALENCIA J S B UAV route planning optimization using PSO implemented on microcontrollers. IEEE Latin America Transactions, 2016, 14 (4): 1705- 1710.
doi: 10.1109/TLA.2016.7483504 |
| 26 | SHIVGAN R, DONG Z Q. Energy-efficient drone coverage path planning using genetic algorithm. Proc. of the IEEE 21st International Conference on High Performance Switching and Routing, 2020: 1−6. DOI: 10.1109/HPSR48589.2020.9098989. |
| 27 |
WU W N, WANG X G, CUI N G Fast and coupled solution for cooperative task planning of multiple heterogeneous unmanned aerial vehicles. Aerospace Science and Technology, 2018, 79, 131- 144.
doi: 10.3390/app10124154 |
| 28 | RADMANESHA M, KUMARB M, SARIMB M Grey wolf optimization-based sense and avoid algorithm in a Bayesian framework for multiple UAV path planning in an uncertain environment. Aerospace Science and Technology, 2018, 77, 168- 179. |
| 29 |
GAO C, ZHEN Z Y, GONG H J A self-organized search and attack algorithm for multiple unmanned aerial vehicles. Aerospace Science and Technology, 2016, 54, 229- 240.
doi: 10.3390/info11040226 |
| 30 |
LI P, DUAN H B A potential game approach to multiple UAV cooperative search and surveillance. Aerospace Science and Technology, 2017, 68, 403- 415.
doi: 10.1016/j.ast.2017.05.031 |
| 31 | LIU Q, SHI L, SUN L L. Path planning for UAV-mounted mobile edge computing with deep reinforcement learning. IEEE Trans. on Vehicular Technology 2020, 69(5): 5723−5728. |
| 32 | WANG B H, WU C, KE W J Intelligent planning method of combat mission based on probability graph. Journal of Systems Engineering and Electronics, 2020, 42 (12): 2795- 2801. |
| 33 |
THI H A L, NGUYEN D M, DINH T P Globally solving a nonlinear UAV mission assignment problem by stochastic and deterministic optimization approaches. Optimization Letters, 2012, 6, 315- 329.
doi: 10.1007/s11590-010-0259-x |
| 34 | EDISON E, SHIMA T Integrated mission assignment and path optimization for cooperating uninhabited aerial vehicles using genetic algorithms. Computers & Operations Research, 2011, 38 (1): 340- 356. |
| 35 |
FOSSEN T I, PETTERSEN K Y, GALEAZZI R Line-of-sight path following for Dubins paths with adaptive sideslip compensation of drift forces. IEEE Trans. on Control Systems Technology, 2015, 23 (2): 820- 827.
doi: 10.1109/TCST.2014.2338354 |
| 36 |
DUBINS L E On curves of minimal length with a constraint on average curvature, and with prescribed initial and terminal positions and tangents. American Journal of Mathematics, 1957, 79 (3): 497- 516.
doi: 10.2307/2372560 |
| 37 | SHKEL A M, LUMELSKY V Classification of the Dubins set. Robotics & Autonomous Systems, 2001, 34 (4): 179- 202. |
| 38 |
LIKAS A, VLASSIS N, VERBEEK J J The global k-means clustering algorithm. Pattern Recognition, 2003, 36 (2): 451- 461.
doi: 10.1016/S0031-3203(02)00060-2 |
| 39 |
MODHA D S, SPANGLER W S Feature weighting in k-means clustering . Machine Learning, 2003, 52, 217- 237.
doi: 10.1023/A:1024016609528 |
| 40 |
RODRIGUEZ A, LAIO A Clustering by fast search and find of density peaks. Science, 2014, 344 (6191): 1492- 1496.
doi: 10.1126/science.1242072 |
| 41 |
RUBINSTEIN R Y Optimization of computer simulation models with rare events. European Journal of Operational Research, 1997, 99, 89- 112.
doi: 10.1016/S0377-2217(96)00385-2 |
| 42 | RUBINSTEIN R Y The cross-entropy method for combinatorial and continuous optimization. Methodology and Computing in Applied Probability, 1999, 2, 127- 190. |
| 43 |
BOER P T D, KROESE D P, MANNOR S A tutorial on the cross-entropy method. Annals of Operations Research, 2005, 134, 19- 67.
doi: 10.1007/s10479-005-5724-z |
| No related articles found! |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||