| 1 |
QUAN Q, LI G, BAI Y Q, et al An overview and suggestions on traffic management of low-altitude UAV. Acta Aeronautica et Astronautica Sinica, 2020, 41 (1): 6- 34.
|
| 2 |
ZHANG Q R, WEI R X, HE R K, et al Flight path planning of urban dense irregular obstacle space UAV. Control Theory & Applications, 2015, 32 (10): 1407- 1413.
|
| 3 |
LEVASSEUR B, BERTRAND S, RABALLAND N, et al. Accurate ground impact footprints and probabilistic maps for risk analysis of UAV missions. Proc. of the IEEE Aerospace Conference, 2019. DOI: 10.1109/AERO.2019.8741718.
|
| 4 |
LUO Q, WANG H B, ZHENG Y, et al Research on path planning of mobile robot based on improved ant colony algorithm. Neural Computing and Applications, 2020, 32 (6): 1555- 1566.
|
| 5 |
BAO S T, LU Y G, et al Research on path planning of UAV based on ant colony algorithm with angle factor. Journal of Physics: Conference Series, 2020, 1627 (1): 1- 8.
|
| 6 |
XU Z, ZHANG E Z, CHEN Q W Rotary unmanned aerial vehicles path planning in rough terrain based on multi-objective particle swarm optimization. Journal of Systems Engineering and Electronics, 2020, 31 (1): 130- 141.
|
| 7 |
ZHANG Q Q, WANG Z Y, ZHANG H H, et al A complex low-altitude multi-aircraft conflict resolution method based on SMILO-VTAC model. Journal of Traffic and Transportation Engineering, 2019, 19 (6): 125- 136.
|
| 8 |
SARIM M, RADMANESH M, DECHERING M, et al Distributed detect-and-avoid for multiple unmanned aerial vehicles in national airspace. Journal of Dynamic Systems, Measurement and Control, 2019, 141 (7): 071014.
|
| 9 |
FAN X J, GUO Y J, LIU H, et al. Improved Artificial Potential Field Method Applied for AUV Path Planning. Mathematical Problems in Engineering, 2020: 6523158. DOI: 10.1155/2020/6523158.
|
| 10 |
ANGEL M, ABDULLA A, DAVID M, et al 3D Trajectory planning method for UAVs swarm in building emergencies. Sensors, 2020, 20 (3): 642.
doi: 10.1109/JSEN.2020.2964488
|
| 11 |
ZHANG Y Y, LI S, GUO H L A type of biased consensus-based distributed neural network for path planning. Nonlinear Dynamics, 2017, 89, 1803- 1815.
|
| 12 |
CHANG Y, WANG Y Q, ALSAADI F E, et al Adaptive fuzzy output-feedback tracking control for switched stochastic pure-feedback nonlinear systems. International Journal of Adaptive Control and Signal Processing, 2019, 33 (10): 1567- 1582.
|
| 13 |
GAO X, FANG Y W, WU Y L Fuzzy Q learning algorithm for dual-aircraft path planning to cooperatively detect targets by passive radars. Journal of Systems Engineering and Electronics, 2013, 24 (5): 800- 810.
doi: 10.1109/JSEE.2013.00093
|
| 14 |
ALEXANDRA G, ESTEN I G, DAC-TU H, et al UAVs trajectory planning by distributed MPC under radio communication path loss constraints. Journal of Intelligent and Robotic Systems, 2015, 79 (1): 115- 134.
doi: 10.1007/s10846-014-0090-1
|
| 15 |
WU J F, WANG H L, LI N, et al Distributed trajectory optimization for multiple solar-powered UAVs target tracking in urban environment by adaptive grasshopper optimization algorithm. Aerospace Science and Technology, 2017, 70, 497- 510.
doi: 10.1016/j.ast.2017.08.037
|
| 16 |
GUAN X M, LU R L A conflict resolution method for complex low-altitude flight based on satisfactory game theory. Acta Aeronautica et Astronautica Sinica, 2017, 38 (S1): 120- 128.
|
| 17 |
SISLAK D Agent-based cooperative decentralized airplane-collision avoidance. IEEE Trans. on Intelligent Transportations Systems, 2011, 12 (1): 36- 46.
|
| 18 |
PRIMATESTA S, GUGLIERI G, RIZZO A A risk aware path planning strategy for UAVs in urban environments. Journal of Intelligent & Robotic Systems, 2019, 95 (2): 629- 643.
|
| 19 |
ZHANG H H, GAN X S, WU Y R, et al. Evaluation of safety target level of UAV system based on Monte-Carlo. http://kns.cnki.net/kcms/detail/41.1227.TN.20201016.0848.002.html. (in Chinese)
|
| 20 |
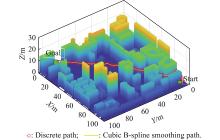
HU X T, WU YU. Risk-based discrete multi-path planning method for UAVs in urban environments. http://kns.cnki.net/kcms/detail/11.1929.V.20200821.1328.006.html.
|
| 21 |
KOH C H, LOW K H, LI L, et al Weight threshold estimation of falling UAVs (unmanned aerial vehicles) based on impact energy. Transportation Research Part C: Emerging Technologies, 2018, 93, 228- 255.
doi: 10.1016/j.trc.2018.04.021
|
| 22 |
ZHANG Z J, ZHANG S G, LIU X, et al Estimated method of target level of safety for unmanned aircraft system. Journal of Aerospace Power, 2018, 33 (4): 1017- 1024.
|
| 23 |
ZHANG X J, LIU Y, ZHANG Y. Safety Assessment and Risk Estimation for Unmanned Aerial Vehicles Operating in National Airspace System. Journal of Advanced Transportation, 2018: 4731585. DOI: 10.1155/2018/4731585.
|
| 24 |
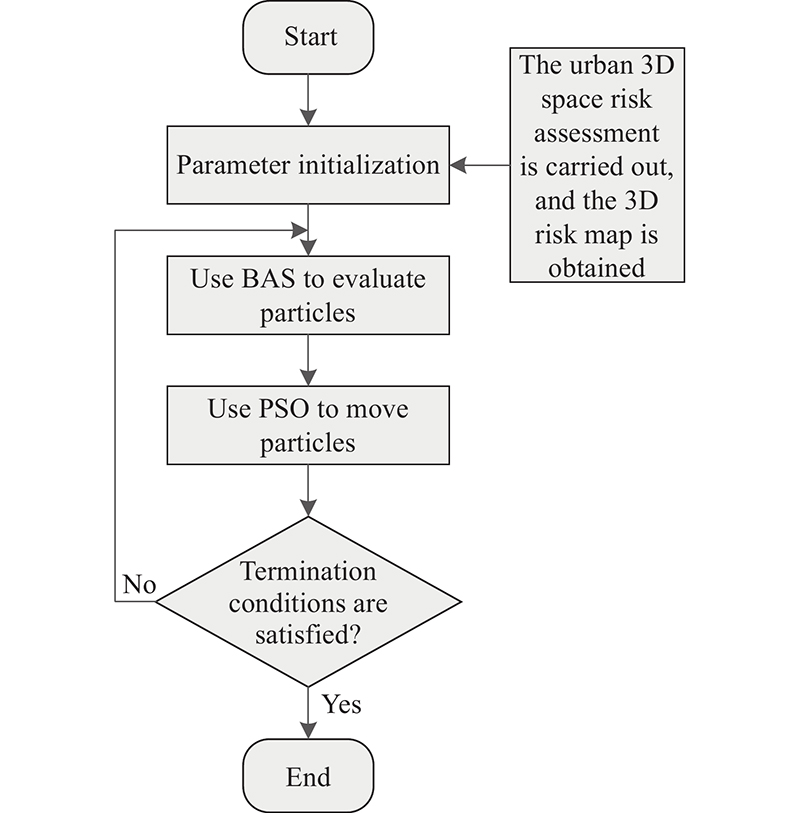
LI Q H, WEI A X, ZHANG Z H Application of economic load distribution of power system based on BAS-PSO. IOP Conference Series: Materials Science and Engineering, 2019, 490 (7): 2727.
|
| 25 |
FAN Y Q, SHAO J P, SUN G T Optimized PID controller based on beetle antennae search algorithm for electro-hydraulic position servo control system. Sensors, 2020, 902, 54- 64.
|
| 26 |
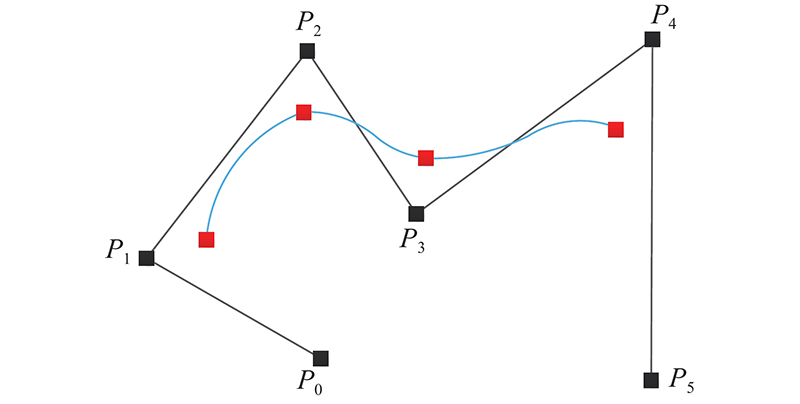
NGOC H T, ANH D N, THANH N N A genetic algorithm application in planning path using B-Spline model for autonomous underwater vehicle (AUV). Applied Mechanics and Materials, 2020, 4796, 54- 64.
|
 ), Xusheng GAN1,2,*(
), Xusheng GAN1,2,*(