Journal of Systems Engineering and Electronics ›› 2022, Vol. 33 ›› Issue (2): 406-425.doi: 10.23919/JSEE.2022.000042
-
收稿日期:2021-08-24出版日期:2022-05-06发布日期:2022-05-06
Bibliometric analysis of UAV swarms
Yangyang JIANG1( ), Yan GAO2(), Wenqi SONG2(), Yue LI2(), Quan QUAN2,*()
), Yan GAO2(), Wenqi SONG2(), Yue LI2(), Quan QUAN2,*()
- 1 Beihang University Library, Beijing 100191, China
2 School of Automation Science and Electrical Engineering, Beihang University, Beijing 100191, China
-
Received:2021-08-24Online:2022-05-06Published:2022-05-06 -
Contact:Quan QUAN E-mail:yangyang@buaa.edu.cn;buaa_gaoyan@buaa.edu.cn;jnswqno1@163.com;liyue9556@buaa.edu.cn;qq_buaa@buaa.edu.cn -
About author:|JIANG Yangyang was born in 1989. She received her B.E. degree from Northeastern University, Shenyang, China, in 2011, and M.S. degree from Beihang University, Beijing, China, in 2014. She is currently a librarian at Beihang University Library. Her research interests include swarm intelligence and information science & library science. E-mail:
yangyang@buaa.edu.cn ||GAO Yan was born in 1994. He received his B.S. degree in control science and engineering from Harbin Institute of Technology, Harbin, China, in 2017. He is working toward his Ph.D. degree at the School of Automation Science and Electrical Engineering, Beihang University, Beijing, China. His main research interests include UAVs swarm and quadcopter control. E-mail:
buaa_gaoyan@buaa.edu.cn ||SONG Wenqi was born in 1999. She received her B.S. degree in control science and engineering from Beihang University, Beijing, China, in 2021. She is working toward her M.S. degree at the School of Automation Science and Electrical Engineering, Beihang University, Beijing, China. Her main research interests include planning and control of UAV swarms and air traffic flow. E-mail:
jnswqno1@163.com ||LI Yue was born in 2000. She received her B.S. degree in control science and engineering from Beihang University, Beijing, China, in 2021. She is working toward her M.S. degree at the School of Automation Science and Electrical Engineering, Beihang University, Beijing, China. Her main research interests include reliable flight control and swarm. E-mail:
liyue9556@buaa.edu.cn ||QUAN Quan was born in 1981. He received his B.S. and Ph.D. degrees in control science and engineering from Beihang University, Beijing, China, in 2004, and 2010, respectively. Since 2013, he has been an associate professor with Beihang University in control science and engineering, where he is currently with the School of Automation Science and Electrical Engineering. His research interests include reliable flight control, swarm intelligence, vision-based navigation and health evaluation. E-mail:
qq_buaa@buaa.edu.cn
引用本文
. [J]. Journal of Systems Engineering and Electronics, 2022, 33(2): 406-425.
Yangyang JIANG, Yan GAO, Wenqi SONG, Yue LI, Quan QUAN. Bibliometric analysis of UAV swarms[J]. Journal of Systems Engineering and Electronics, 2022, 33(2): 406-425.

"
"
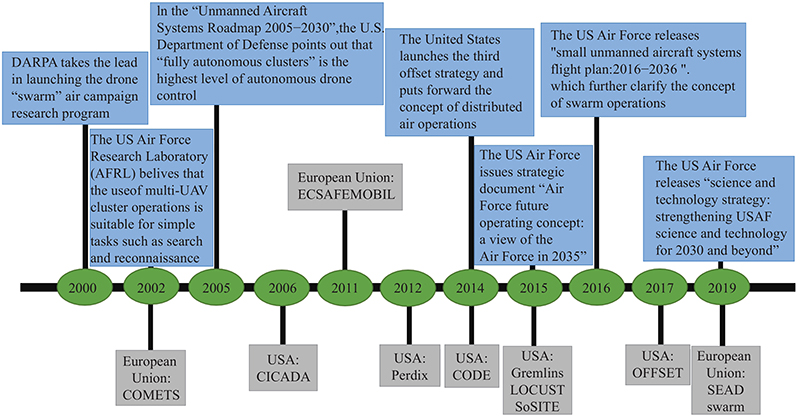
| Country/Organization | Project | Description |
| USA | 2006:CICADA | Close-in covert autonomous disposable aircraft |
| 2012:Perdix | Collective decision making, adaptive formation flying, and self-healing | |
| 2014:CODE | Collaborative operations in denied environment system | |
| 2015:Gremlins | Develop and demonstrate the ability to air-launch and air-recover up to drones | |
| 2015:LOCUST | Low-cost UAV swarming technology | |
| 2015:SoSITE | System of systems integration technology and experimentation | |
| 2015:LCAAT | Low-cost attritable aircraft technology | |
| 2017:OFFSET | Offensive swarm-enabled tactics | |
| European Union | 2002:COMETS | Real-time coordination and control of multiple heterogeneous UAVs |
| 2011:ECSAFEMOBIL | The estimation and control project of the high mobility collaborative industrial system for secure wireless | |
| 2019:SEAD Swarm | Suppression of enemy air defenses | |
| Russia | 2019:Launched “Flock-93” combat demonstration system | “Flock-93” will be flying wings and have vertical take-off and landing capability, promising both flexibility and target range of around 95 miles |
| 2019:Tsentr-2019 | Orlan-10 unmanned aircraft, as well as other variants of that drone with sensor and electronic warfare payloads, to locate and try to destroy critical air defense systems, command posts, communications nodes | |
| 2020: “Grom” UAV | Performing intelligence, surveillance, strike, and electronic warfare missions either on its own, as a loyal wing working together with a manned aircraft, or in a networked autonomous swarm | |
| China | 2016:67 fixed-wing UAV swarms test | It broke the previous record of 50 fixed-wing UAV clusters held by the US Navy |
| 2017:119 fixed-wing UAV swarms test | Dense ejection take-off, air assembly, multi-target grouping, formation encirclement, swarm operation |

"

"
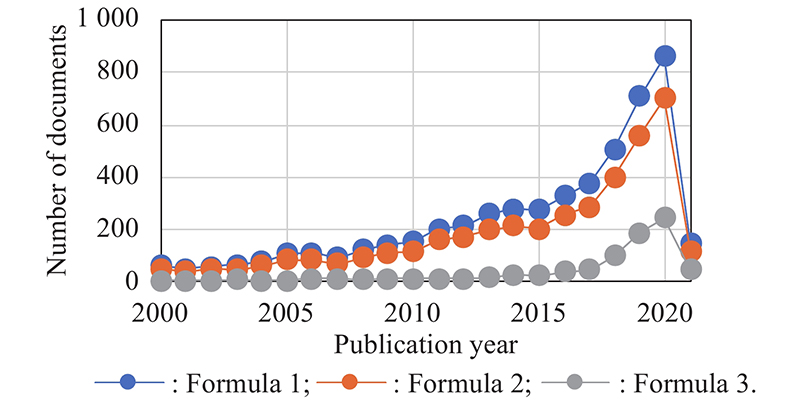
| Searching formula | Topic search |
| Formula 1 | TS = “swarm UAV*” OR “UAV swarm” OR “swarm drone*” OR “drone swarm” OR “swarm robot*” OR “robot* swarm” OR “swarm vehicle*” OR “vehicle swarm” OR “formation UAV*” OR “UAV formation” OR “drone formation” OR “formation drone*” OR “formation robot*” OR “robot* formation” OR “formation vehicle*” OR “vehicle formation” OR “team UAV*” OR “UAV team” OR “drone team” OR “team robot*” OR “robot* team” OR “team vehicle*” OR “vehicle team” OR “multi-UAV*” OR “multi-drone*” OR “multi-robot*” OR “multi-vehicle*” OR “multiple UAV” OR “multiple drone*” OR “multiple robot*” OR “multiple vehicle*” OR “distributed UAV*” OR “distributed drone*” OR “distributed robot*” OR “distributed vehicle*” OR “collective UAV*” OR “collective robot*” OR “collective vehicle*” |
| Formula 2 | TS = “swarm UAV*” OR “UAV swarm” OR “swarm drone*” OR “drone swarm” OR “swarm robot*” OR “robot* swarm” OR “formation UAV*” OR “UAV formation” OR “drone formation” OR “formation drone*” OR “formation robot*” OR “robot* formation” OR “team UAV*” OR “UAV team” OR “drone team” OR “team robot*” OR “robot* team” OR “multi-UAV*” OR “multi-drone*” OR “multi-robot*” OR “multiple UAV” OR “multiple drone*” OR “multiple robot*” OR “distributed UAV*” OR “distributed drone*” OR “distributed robot*” |
| Formula 3 | TS = “Swarm UAV*” OR “UAV swarm” OR “swarm drone*” OR “drone swarm” OR “formation UAV*” OR “UAV formation” OR “drone formation” OR “formation drone*” OR “team UAV*” OR “UAV team” OR “drone team” OR “multi-UAV*” OR “multi-drone*” OR “multiple UAV” OR “multiple drone*” OR “distributed UAV*” OR “distributed drone*” |
"
"
"
| Countries | Strength | Begin | End |
| USA | 4.72 | 2010 | 2010 |
| Portugal | 8.74 | 2011 | 2016 |
| Germany | 5.98 | 2011 | 2013 |
| Spain | 4.14 | 2013 | 2013 |
| Switzerland | 2.97 | 2014 | 2014 |
| Russia | 2.58 | 2015 | 2015 |
| Brazil | 4.76 | 2016 | 2017 |
| Saudi Arabia | 3.02 | 2020 | 2021 |
| Finland | 2.69 | 2020 | 2021 |
"
| Rank | Country/region | Document | Citation | Total link strength | Link |
| 1 | China | 1017 | 10279 | 393 | 46 |
| 2 | USA | 780 | 14237 | 396 | 50 |
| 3 | Spain | 212 | 3150 | 121 | 30 |
| 4 | England | 188 | 2700 | 176 | 35 |
| 5 | Italy | 182 | 2640 | 164 | 34 |
| 6 | South Korea | 182 | 1712 | 66 | 15 |
| 7 | Canada | 150 | 2143 | 131 | 27 |
| 8 | India | 139 | 1497 | 70 | 28 |
| 9 | Germany | 133 | 2136 | 121 | 30 |
| 10 | Japan | 113 | 1083 | 64 | 20 |

"

"

"
"
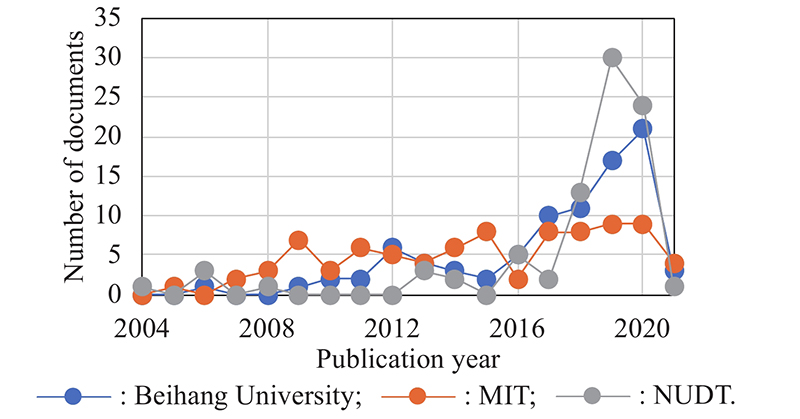
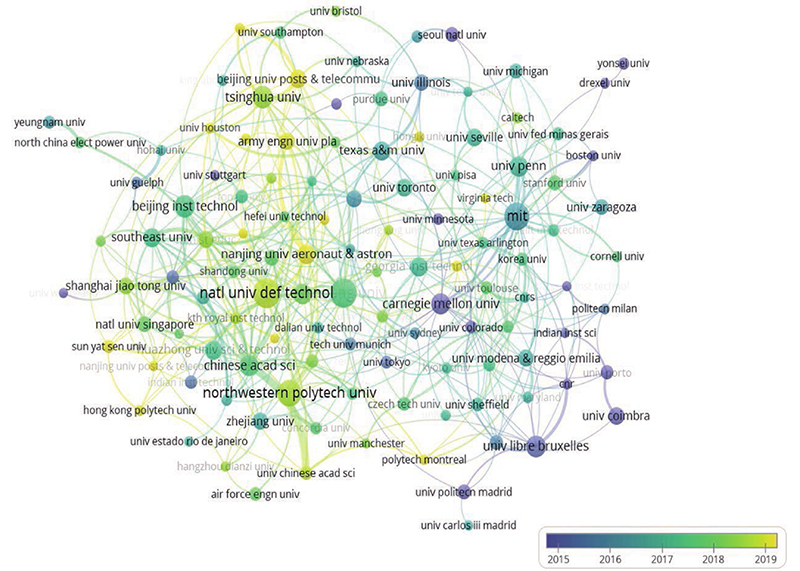
| Rank | Organization | Document | Citation | Total link strength | Link |
| 1 | NUDT | 79 | 266 | 69 | 46 |
| 2 | Beihang University | 75 | 936 | 84 | 65 |
| 3 | MIT | 70 | 1477 | 109 | 79 |
| 4 | Northwestern Polytechnical University | 63 | 444 | 69 | 42 |
| 5 | Beijing Institute of Technology | 46 | 468 | 54 | 42 |
| 6 | Tsinghua University | 45 | 973 | 91 | 59 |
| 7 | Université Libre de Bruxelles | 43 | 1535 | 62 | 46 |
| 8 | Carnegie Mellon University | 41 | 1255 | 54 | 43 |
| 9 | Chinese Academy of Sciences | 41 | 235 | 96 | 60 |
| 10 | Nanyang Technological University | 39 | 393 | 45 | 34 |
"

"
"
| Rank | Subject | Document |
| 1 | Computer science | 1420 |
| 2 | Engineering | 1330 |
| 3 | Robotics | 1164 |
| 4 | Automation control systems | 697 |
| 5 | Telecommunications | 440 |
| 6 | Instruments instrumentation | 310 |
| 7 | Chemistry | 194 |
| 8 | Mathematics | 157 |
| 9 | Physics | 146 |
| 10 | Materials science | 98 |
| 11 | Operations research management science | 94 |
| 12 | Science technology (other topics) | 90 |
| 13 | Transportation | 51 |
| 14 | Mechanics | 37 |
| 15 | Psychology | 27 |
| 16 | Neurosciences neurology | 21 |
| 17 | Construction building technology | 13 |
| 18 | Environmental sciences ecology | 12 |
| 19 | Oceanography | 12 |
| 20 | Social sciences (other topics) | 12 |
"
| Rank | Journal | Document | 2020 impact factor | JCR partition |
| 1 | IEEE Access | 192 | 3.367 | Q2 |
| 2 | IEEE Robotics and Automation Letters | 157 | 3.741 | Q2 |
| 3 | Robotics and Autonomous Systems | 148 | 3.12 | Q2 |
| 4 | Journal of Intelligent Robotic Systems | 136 | 2.646 | Q2 |
| 5 | IET Control Theory and Applications | 125 | 3.527 | Q1 |
| 6 | Autonomous Robots | 115 | 3.0 | Q2 |
| 7 | Sensors | 113 | 3.576 | Q1 |
| 8 | International Journal of Robotics Research | 108 | 4.703 | Q1 |
| 9 | International Journal of Advanced Robotic Systems | 97 | 1.652 | Q4 |
| 10 | IEEE Transactions on Robotics | 76 | 5.567 | Q1 |
| 11 | Applied Sciences Basel | 67 | 2.679 | Q2 |
| 12 | Robotica | 63 | 2.088 | Q3 |
| 13 | Swarm Intelligence | 52 | 2.143 | Q3 |
| 14 | International Journal of Robotics Automation | 40 | 0.796 | Q4 |
| 15 | Advanced Robotics | 34 | 1.699 | Q4 |
| 16 | IEEE Transactions on Vehicular Technology | 34 | 5.978 | Q1 |
| 17 | Neurocomputing | 32 | 5.719 | Q1 |
| 18 | Applied Soft Computing | 29 | 6.725 | Q1 |
| 19 | International Journal of Control Automation and Systems | 26 | 3.314 | Q2 |
| 20 | Intelligent Service Robotics | 25 | 2.246 | Q3 |
"
| Rank | Conference | Document |
| 1 | IEEE International Conference on Robotics and Automation | 547 |
| 2 | IEEE International Conference on Intelligent Robots and Systems | 319 |
| 3 | Lecture Notes in Computer Science | 317 |
| 4 | Lecture Notes in Artificial Intelligence | 274 |
| 5 | Proceedings of SPIE | 147 |
| 6 | IEEE International Conference on Systems, Man and Cybernetics | 137 |
| 7 | Proceedings of the American Control Conference | 126 |
| 8 | Springer Tracts in Advanced Robotics | 115 |
| 9 | Chinese Control Conference | 112 |
| 10 | IEEE Conference on Decision and Control | 109 |
"
| Behavior | Total | China | USA | |||||
| Document | Proportion/% | Document | Proportion/% | Document | Proportion/% | |||
| Formation | 593 | 27.45 | 248 | 30.88 | 96 | 21.57 | ||
| Consensus | 387 | 17.92 | 215 | 26.77 | 70 | 15.73 | ||
| Coverage | 303 | 14.03 | 92 | 11.46 | 85 | 19.10 | ||
| Exploration | 272 | 12.59 | 40 | 4.98 | 62 | 13.93 | ||
| Synchronization | 141 | 6.53 | 70 | 8.72 | 27 | 6.07 | ||
| Searching | 95 | 4.40 | 47 | 5.85 | 14 | 3.15 | ||
| Transport | 87 | 4.03 | 17 | 2.12 | 23 | 5.17 | ||
| Aggregation | 70 | 3.24 | 16 | 1.99 | 6 | 1.35 | ||
| Self-organization | 70 | 3.24 | 12 | 1.49 | 16 | 3.60 | ||
| Rendezvous | 40 | 1.85 | 13 | 1.62 | 10 | 2.25 | ||
| Pattern formation | 28 | 1.30 | 8 | 1.00 | 8 | 1.80 | ||
| Self-assembly | 28 | 1.30 | 15 | 1.87 | 10 | 2.25 | ||
| Patrol | 25 | 1.16 | 6 | 0.75 | 11 | 2.47 | ||
| Morphogenesis | 16 | 0.74 | 2 | 0.25 | 7 | 1.57 | ||
| Forage | 4 | 0.19 | 2 | 0.25 | 0 | 0.00 | ||
| Chain formation | 1 | 0.05 | 0 | 0.00 | 0 | 0.00 | ||
| Connected movement | 0 | 0.00 | 0 | 0.00 | 0 | 0.00 | ||
| Self-organized construction | 0 | 0.00 | 0 | 0.00 | 0 | 0.00 | ||
| Total | 2160 | 100.00 | 803 | 100.00 | 445 | 100.00 | ||
"
| Function | Document | Proportion/% | China | USA | |||
| Document | Proportion/% | Document | Proportion/% | ||||
| Control | 1437 | 28.01 | 494 | 32.33 | 331 | 26.95 | |
| Communication | 914 | 17.81 | 307 | 20.09 | 212 | 17.26 | |
| Planning | 651 | 12.69 | 151 | 9.88 | 195 | 15.88 | |
| Tracking | 499 | 9.73 | 224 | 14.66 | 81 | 6.60 | |
| Localization | 384 | 7.48 | 94 | 6.15 | 94 | 7.65 | |
| Navigation | 339 | 6.61 | 47 | 3.08 | 75 | 6.11 | |
| Task allocation | 244 | 4.76 | 68 | 4.45 | 66 | 5.37 | |
| Mapping | 206 | 4.01 | 34 | 2.23 | 64 | 5.21 | |
| Surveillance | 158 | 3.08 | 32 | 2.09 | 43 | 3.50 | |
| Monitoring | 155 | 3.02 | 29 | 1.90 | 36 | 2.93 | |
| Security | 87 | 1.70 | 35 | 2.29 | 15 | 1.22 | |
| Fault detection | 23 | 0.45 | 6 | 0.39 | 3 | 0.24 | |
| Target detection | 16 | 0.31 | 4 | 0.26 | 8 | 0.65 | |
| Diagnosis | 15 | 0.29 | 2 | 0.13 | 4 | 0.33 | |
| Risk assessment | 3 | 0.06 | 1 | 0.07 | 1 | 0.08 | |
| Total | 5131 | 100.00 | 1528 | 100.00 | 1228 | 100.00 | |
"
"

"
"
| Keyword | Strength | Begin | End |
| Self-organization | 7.61 | 2010 | 2014 |
| Self-assembly | 5.43 | 2010 | 2012 |
| Mobile and distributed robotics slam | 5.03 | 2010 | 2015 |
| Multi-robot | 4.83 | 2010 | 2012 |
| Cooperative robot | 3.81 | 2010 | 2012 |
| Field and service robotics | 3.46 | 2010 | 2012 |
| Robotics | 3.37 | 2010 | 2016 |
| Motion planning | 7.23 | 2011 | 2016 |
| Multiple robot | 5.32 | 2011 | 2014 |
| Modular robot | 3.97 | 2011 | 2014 |
| Mapping | 3.67 | 2011 | 2012 |
| Mobile robotics | 3.47 | 2011 | 2014 |
| Distributed robotics | 3.45 | 2011 | 2012 |
| Networked robot | 6.06 | 2012 | 2015 |
| Multi-robot cooperation | 4.88 | 2012 | 2015 |
| Task allocation | 4.35 | 2012 | 2013 |
| SLAM | 4.03 | 2012 | 2013 |
| Simulation | 3.95 | 2012 | 2013 |
| Communication | 3.83 | 2013 | 2016 |
| Multi-agent | 3.75 | 2013 | 2015 |
| Swarm robotics | 6.34 | 2014 | 2016 |
| Aerial robotics | 3.45 | 2014 | 2018 |
| Formation control | 5.15 | 2015 | 2016 |
| Quadrotor | 4.06 | 2015 | 2017 |
| Multiagent system | 4.63 | 2017 | 2018 |
| UAV swarm | 4.18 | 2018 | 2021 |
| UAV | 7.46 | 2019 | 2021 |
| Routing | 4.1 | 2019 | 2021 |
| Topology | 3.85 | 2019 | 2021 |
| Sensor | 3.59 | 2019 | 2021 |

"
"
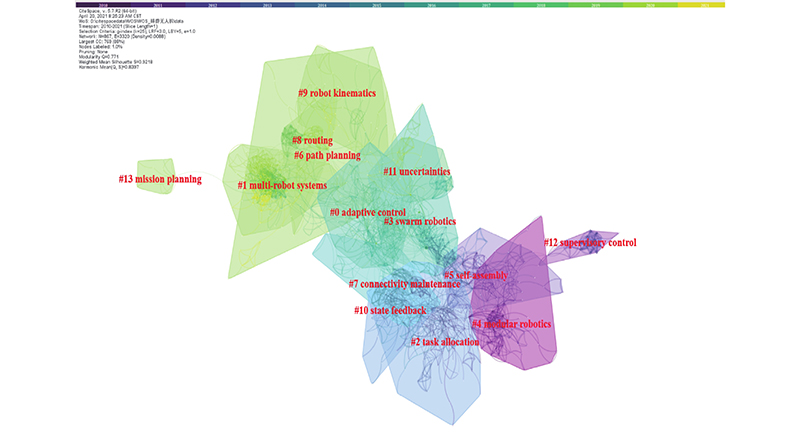
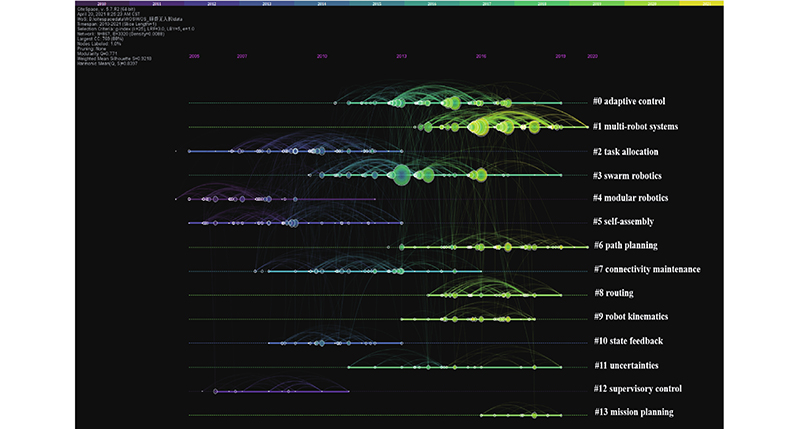
| Cluster ID | Size | Silhouette | Average/year | Cluster ID | Size | Silhouette | Average/year | |
| #0(C0) | 112 | 0.829 | 2014 | #7(C7) | 47 | 0.92 | 2011 | |
| #1(C1) | 110 | 0.926 | 2017 | #8(C8) | 33 | 0.992 | 2016 | |
| #2(C2) | 106 | 0.909 | 2009 | #9(C9) | 30 | 0.986 | 2016 | |
| #3(C3) | 74 | 0.914 | 2013 | #10(C10) | 26 | 0.97 | 2010 | |
| #4(C4) | 60 | 0.979 | 2006 | #11(C11) | 20 | 0.972 | 2014 | |
| #5(C5) | 60 | 0.882 | 2008 | #12(C12) | 17 | 0.982 | 2008 | |
| #6(C6) | 50 | 0.953 | 2016 | #13(C13) | 11 | 1 | 2017 |

"
| 1 | DONG Y, GAO M, ZHANG Y, et al Research progress and development trends of U.S. army swarm drones. Aerodynamic Missile Journal, 2020, 9, 37- 42. |
| 2 | ARQUILLA J, RONFELDT D. Swarming and the future of conflict. Santa Monica: RAND National Security Research Institute, 2000. |
| 3 | YUAN C, ZHENG Y Overview of the research progress of foreign advanced military aviation technology in 2018. Aerodynamic Missile Journal, 2019, 4, 22- 28. |
| 4 | US Air Force. Air Force future operating concept: a view of the Air Force in 2035. https://www.af.mil/News/Paper-Display/Paper/617301/af-releases-future-operating-concept. |
| 5 | US Air Force. Small unmanned aircraft systems (SUAS) flight plan: 2016-2036. https://dronebusiness.center/usafsuas-flight-plan-2016-2036-10529. |
| 6 | US Air Force. Science and technology strategy: strengthening USAF science and technology for 2030 and beyond. https://www.af.mil/Portals/1/documents/2019%20SAF%20story%20attachments/Air%20Force%20Science%20and%20Technology%20Strategy.pdf?ver=2019-04-17-13-131216-723. |
| 7 | MCCULLOUGH A. The looming swarm. Air Force Magzine. http://www.airforcemag.com/article/the-looming-swarm. |
| 8 | OLLERO A, LACROIX S, MERINO L, et al Multiple eyes in the skies, architecture and perception issues in the COMETS unmanned air vehicles project. IEEE Robotics & Automation Magazine, 2005, 12 (2): 46- 57. |
| 9 | BONABEAU E, DORIGO M, THERAULAZ G. Swarm intelligence: from natural to artificial systems. New York: Oxford University Press, 1999. |
| 10 | REYNOLDS C W Flocks, herds and schools: a distributed behavioral model. Proc. of the 14th Annual Conference on Computer Graphics and Interactive Techniques, 1987, 25- 34. |
| 11 |
VICSEK T, CZIROK A, BEN J E, et al Novel type of phase transition in a system of self-driven particles. Physical Review Letters, 1995, 75 (6): 1226- 1229.
doi: 10.1103/PhysRevLett.75.1226 |
| 12 |
STEPHEN W Statistical mechanics of cellular automata. Reviews of Modern Physics, 1983, 55 (3): 601- 644.
doi: 10.1103/RevModPhys.55.601 |
| 13 | TONER J, TU Y Flocks, herds, and schools: a quantitative theory of flocking. Physical Review E, 1999, 58, 4828- 4858. |
| 14 |
BRAMBILLA M, FERRANTE E, BIRATTARI M, et al Swarm robotics: a review from the swarm engineering perspective. Swarm Intelligence, 2013, 7 (1): 1- 41.
doi: 10.1007/s11721-012-0075-2 |
| 15 | EBERHART R C, SHI Y, KENNEDY J. Swarm intelligence. San Francisco: Morgan Kaufmann Publishers, 2001. |
| 16 | DORIGO M, SAHIN E Special issue on swarm robotics. Autonomous Robots, 2004, 17 (2/3): 111- 246. |
| 17 | SAHIN E Swarm robotics: from sources of inspiration to domains of application. Proc. of the First International Workshop on Swarm Robotics, 2005, 3342, 10- 20. |
| 18 |
SPEZZANO G Editorial: special issue “swarm robotics”. Applied Sciences, 2019, 9 (7): 1474.
doi: 10.3390/app9071474 |
| 19 | DAUTENHAHN K Embodiment and interaction in socially intelligent life-like agents. Computation for Metaphors, Analogy and Agent, 1999, 1562, 102- 142. |
| 20 | KAZADI S. Swarm engineering. Pasadena: California Institute of Technology, 2000. |
| 21 | WINFIELD A F T, HARPER C J, NEMBRINI J Towards dependable swarms and a new discipline of swarm engineering. Proc. of the International Workshop on Simulation of Adaptive Behavior, 2004, 342, 126- 142. |
| 22 | LI J. Principles and applications of mapping knowledge domains. Beijing: Higher Education Press, 2018. |
| 23 | LI J, CHEN C M. CiteSpace: text mining and visualization in scientific literature. Beijing: Capital University of Economics and Trade Press, 2017. |
| 24 |
ECK N J V, WALTMAN L Software survey: VOSviewer, a computer program for bibliometric mapping. Scientometrics, 2010, 84 (2): 523- 538.
doi: 10.1007/s11192-009-0146-3 |
| 25 | MANATHARA J G, SUJIT P B, BEARD R W Multiple UAV coalitions for a search and prosecute mission. Journal of Intelligent & Robotic Systems, 2011, 62 (1): 125- 158. |
| 26 | GEORGE J, SUJIT P B, SOUSA J B Search strategies for multiple UAV search and destroy missions. Journal of Intelligent & Robotic Systems, 2011, 61 (1–4): 355- 367. |
| 27 |
FRANCHI A, SECCHI C, SON H I, et al Bilateral teleoperation of groups of mobile robots with time-varying topology. IEEE Trans. on Robotics, 2012, 28 (5): 1019- 1033.
doi: 10.1109/TRO.2012.2196304 |
| 28 |
SCHWAGER M, JULIAN B J, ANGERMANN M Eyes in the sky: decentralized control for the deployment of robotic camera networks. Proceedings of the IEEE, 2011, 99 (9): 1541- 1561.
doi: 10.1109/JPROC.2011.2158377 |
| 29 | CHEN C M. CiteSpace: a practical guide for mapping scientific literature. Hauppauge: Nova Science Publishers, 2016. |
| 30 |
OLFATI-SABER R, FAX J A, MURRAY R M Consensus and cooperation in networked multi-agent systems. Proceedings of the IEEE, 2007, 95 (1): 215- 233.
doi: 10.1109/JPROC.2006.887293 |
| 31 |
OLFATI-SABER R Flocking for multi-agent dynamic systems: algorithms and theory. IEEE Trans. on Automatic Control, 2006, 51 (3): 401- 420.
doi: 10.1109/TAC.2005.864190 |
| 32 |
TANNER H G, JADBABAIE A, PAPPAS G J Flocking in fixed and switching networks. IEEE Trans. on Automatic Control, 2007, 52 (5): 863- 868.
doi: 10.1109/TAC.2007.895948 |
| 33 |
KERNBACH S, THENIUS R, KERNBACH O, et al Re-embodiment of honeybee aggregation behavior in an artificial micro-robotic system. Adaptive Behavior, 2009, 17 (3): 237- 259.
doi: 10.1177/1059712309104966 |
| 34 |
BERMAN S, HALASZ A, HSIEH M A, et al Optimized stochastic policies for task allocation in swarms of robots. IEEE Trans. on Robotics, 2009, 25 (4): 927- 937.
doi: 10.1109/TRO.2009.2024997 |
| 35 |
DIAS M B, ZLOT R, KALRA N, et al Market-based multirobot coordination: a survey and analysis. Proceedings of the IEEE, 2006, 94 (7): 1257- 1270.
doi: 10.1109/JPROC.2006.876939 |
| 36 |
CHEN J, SUN D, YANG J, et al Leader-follower formation control of multiple non-holonomic mobile robots incorporating a receding-horizon scheme. The International Journal of Robotics Research, 2010, 29 (6): 727- 747.
doi: 10.1177/0278364909104290 |
| 37 |
CHOI H L, BRUNET L, HOW J P Consensus-based decentralized auctions for robust task allocation. IEEE Trans. on Robotics, 2009, 25 (4): 912- 926.
doi: 10.1109/TRO.2009.2022423 |
| 38 |
SUN D, WANG C, SHANG W, et al A synchronization approach to trajectory tracking of multiple mobile robots while maintaining time-varying formations. IEEE Trans. on Robotics, 2009, 25 (5): 1074- 1086.
doi: 10.1109/TRO.2009.2027384 |
| 39 |
GIL S, KUMAR S, KATABI D, et al Adaptive communication in multi-robot systems using directionality of signal strength. The International Journal of Robotics Research, 2015, 34 (7): 946- 968.
doi: 10.1177/0278364914567793 |
| 40 | MARTIN A, EMAMI M R Just-in-time cooperative simultaneous localization and mapping: a robust paper filter approach. International Journal of Robotics and Automation, 2014, 29 (2): 119- 132. |
| 41 |
LEE D, FRANCHI A, SON H I, et al Semi-autonomous haptic teleoperation control architecture of multiple unmanned aerial vehicles. IEEE/ASME Trans. on Mechatronics, 2013, 18 (4): 1334- 1345.
doi: 10.1109/TMECH.2013.2263963 |
| 42 |
SABATTINI L, CHOPRA N, SECCHI C Decentralized connectivity maintenance for cooperative control of mobile robotic systems. The International Journal of Robotics Research, 2013, 32 (12): 1411- 1423.
doi: 10.1177/0278364913499085 |
| 43 |
GALCERAN E, CARRERAS M A survey on coverage path planning for robotics. Robotics and Autonomous Systems, 2013, 61 (12): 1258- 1276.
doi: 10.1016/j.robot.2013.09.004 |
| 44 | VAN H H, GUEZ A, SILVER D. Deep reinforcement learning with double q-learning. Proc. of the AAAI Conference on Artificial Intelligence, 2016, 30(1): 2094–2100. |
| 45 |
RUBENSTEIN M, CORNEJO A, NAGPAL R Programmable self-assembly in a thousand-robot swarm. Science, 2014, 345 (6198): 795- 799.
doi: 10.1126/science.1254295 |
| 46 | DORIGO M, FLOREANO D, GAMBARDELLA L M, et al Swarmanoid: a novel concept for the study of heterogeneous robotic swarms. IEEE Robotics & Automation Magazine, 2013, 20 (4): 60- 71. |
| 47 |
OH K K, PARK M C, AHN H S A survey of multi-agent formation control. Automatica, 2015, 53, 424- 440.
doi: 10.1016/j.automatica.2014.10.022 |
| 48 | KHAMIS A, HUSSEIN A, ELMOGY A Multi-robot task allocation: a review of the state-of-the-art. Cooperative Robots and Sensor Networks, 2015, 604, 31- 51. |
| 49 | CAO X H, CHENG P, CHEN J M, et al An online optimization approach for control and communication codesign in networked cyber-physical systems. IEEE Trans. on Industrial Informatics, 2012, 9 (1): 439- 450. |
| 50 |
ERDELJ M, NATALIZIO E, CHOWDHURY K R, et al Help from the sky: leveraging UAVs for disaster management. IEEE Pervasive Computing, 2017, 16 (1): 24- 32.
doi: 10.1109/MPRV.2017.11 |
| 51 | KOLLING A, WALKER P, CHAKRABORTY N, et al Human interaction with robot swarms: a survey. IEEE Trans. on Human-Machine Systems, 2015, 46 (1): 9- 26. |
| 52 |
BEKMEZCI I, SAHINGOZ O K, TEMEL S Flying ad-hoc networks (FANETs): a survey. Ad Hoc Networks, 2013, 11 (3): 1254- 1270.
doi: 10.1016/j.adhoc.2012.12.004 |
| 53 |
MOTLAGH N H, TALEB T, AROUK O Low-altitude unmanned aerial vehicles-based Internet of Things services: comprehensive survey and future perspectives. IEEE Internet of Things Journal, 2016, 3 (6): 899- 922.
doi: 10.1109/JIOT.2016.2612119 |
| 54 | DORLING K, HEINRICHS J, MESSIER G G, et al Vehicle routing problems for drone delivery. IEEE Trans. on Systems, Man & Cybernetics Systems, 2017, 47 (1): 70- 85. |
| 55 |
MURRAY C C, CHU A G The flying sidekick traveling salesman problem: optimization of drone-assisted parcel delivery. Transportation Research Part C: Emerging Technologies, 2015, 54, 86- 109.
doi: 10.1016/j.trc.2015.03.005 |
| 56 |
ZENG Y, ZHANG R, LIM T J Wireless communications with unmanned aerial vehicles: opportunities and challenges. IEEE Communications Magazine, 2016, 54 (5): 36- 42.
doi: 10.1109/MCOM.2016.7470933 |
| 57 | GUPTA L, JAIN R, VASZKUN G Survey of important issues in UAV communication networks. IEEE Communications Surveys & Tutorials, 2015, 18 (2): 1123- 1152. |
| 58 |
WU Q Q, ZENG Y, ZHANG R Joint trajectory and communication design for multi-UAV enabled wireless networks. IEEE Trans. on Wireless Communications, 2018, 17 (3): 2109- 2121.
doi: 10.1109/TWC.2017.2789293 |
| 59 |
DORIGO M, THERAULAZ G, TRIANNI V Reflections on the future of swarm robotics. Science Robotics, 2020, 5 (49): eabe4385.
doi: 10.1126/scirobotics.abe4385 |
| 60 |
BIRATTARI M, LIGOT A, HASSELMANN K Disentangling automatic and semi-automatic approaches to the optimization-based design of control software for robot swarms. Nature Machine Intelligence, 2020, 2 (9): 494- 499.
doi: 10.1038/s42256-020-0215-0 |
| 61 |
SANCHEZ T, CHEN D T N, DECAMP S J, et al Spontaneous motion in hierarchically assembled active matter. Nature, 2012, 491, 431- 434.
doi: 10.1038/nature11591 |
| 62 |
MORIN A, DESREUMAUX N, CAUSSIN J B, et al Distortion and destruction of colloidal flocks in disordered environments. Nature Physics, 2017, 13 (1): 63- 67.
doi: 10.1038/nphys3903 |
| 63 |
MATEO D, HORSEVAD N, HASSANI V, et al Optimal network topology for responsive collective behavior. Science Advances, 2019, 5 (4): eaau0999.
doi: 10.1126/sciadv.aau0999 |
| 64 |
BASTIEN R, ROMANCZUK P A model of collective behavior based purely on vision. Science Advances, 2020, 6 (6): eaay0792.
doi: 10.1126/sciadv.aay0792 |
| 65 |
PETERSEN K H, NAPP N, STUART-SMITH R, et al A review of collective robotic construction. Science Robotics, 2019, 4 (28): eaau8479.
doi: 10.1126/scirobotics.aau8479 |
| 66 |
GARATTONI L, BIRATTARI M Autonomous task sequencing in a robot swarm. Science Robotics, 2018, 3 (20): eaat0430.
doi: 10.1126/scirobotics.aat0430 |
| 67 | CARBONE C, GARIBALDI O, KURT Z Swarm robotics as a solution to crops inspection for precision agriculture. KnE Engineering, 2018, 3 (2): 552- 562. |
| 68 | PLEVRIS V, KARLAFTIS M G, LAGAROS N D Sustainable and resilient critical infrastructure systems. Berlin: Springer, 2010, 201- 230. |
| 69 | SIMPSON A D, RAWASHDEH O A, SMITH S W, et al Big blue: high-altitude UAV demonstrator of Mars airplane technology. Proc. of the IEEE Aerospace Conference, 2005, 4461- 4471. |
| 70 | GALLEGO G, DELBRUCK T, ORCHARD G M, et al Event-based vision: a survey. IEEE Trans. on Pattern Analysis and Machine Intelligence, 2020, 44 (1): 154- 180. |
| 71 |
SHI C Y, WANG Y Y, LIU C Y, et al SCECam: a spherical compound eye camera for fast location and recognition of objects at a large field of view. Optics Express, 2017, 25 (26): 32333- 32345.
doi: 10.1364/OE.25.032333 |
| 72 |
CHUNG S J, PARANJAPE A A, DAMES P, et al A survey on aerial swarm robotics. IEEE Trans. on Robotics, 2018, 34 (4): 837- 855.
doi: 10.1109/TRO.2018.2857475 |
| 73 |
YANG G Z, BELLINGHAM J, DUPONT P E, et al The grand challenges of science robotics. Science Robotics, 2018, 3 (14): eaar7650.
doi: 10.1126/scirobotics.aar7650 |
| 74 | COPPOLA M, MCGUIRE K N, DE WAGTER C, et al. A survey on swarming with micro air vehicles: fundamental challenges and constraints. Frontiers in Robotics and AI, 2020, 7: 18. |
| No related articles found! |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||