Journal of Systems Engineering and Electronics ›› 2021, Vol. 32 ›› Issue (6): 1509-1526.doi: 10.23919/JSEE.2021.000127
-
收稿日期:2020-06-16出版日期:2022-01-05发布日期:2022-01-05
Influence of roll-pitch seeker DRR and parasitic loop on Lyapunov stability of guidance system
Yue LI1( ), Xianghua WEN2,*(), Wei LI2(), Lan WEI2(), Qunli XIA1()
), Xianghua WEN2,*(), Wei LI2(), Lan WEI2(), Qunli XIA1()
- 1 School of Aerospace Engineering, Beijing Institute of Technology, Beijing 100081, China
2 No. 5718 Factory, Chinese People’s Liberation Army, Guilin 541002, China
-
Received:2020-06-16Online:2022-01-05Published:2022-01-05 -
Contact:Xianghua WEN E-mail:liyue627167955@163.com;495460738@qq.com;lion_lee1994@126.com;389968247@qq.com;1010@bit.edu.cn -
About author:|LI Yue was born in 1995. He received his B.E. degree from Beijing Institute of Technology in 2016. He is currently a doctoral student in School of Aerospace Engineering, Beijing Institute of Technology. His main research interests include flight vehicle design, guidance and control. E-mail:
liyue627167955@163.com ||WEN Xianghua was born in1982. He received his B.E. degree in ammunition control major from Changsha University of Science and Technology in 2006, and Master’s degree in control engineering from Beijing University of Aeronautics and Astronautics in 2015. He is a senior engineer working in the No. 5718 Factory of the Chinese People’s Liberation Army. His research interests include guidance and control. E-mail:
495460738@qq.com ||LI Wei was born in 1994. He received his B.E. degree from Beijing Institute of Technology in 2015. He is currently a doctoral student in School of Aerospace Engineering, Beijing Institute of Technology. His main research interests include flight vehicle design, guidance and control. E-mail:
lion_lee1994@126.com ||WEI Lan was born in 1994. She received her B.E. degree in electronic information engineering from North University of China in 2017. She is a master in Beijing Institute of Technology. Her research interest is aircraft control. E-mail:
389968247@qq.com ||XIA Qunli was born in 1971. He received his B.E. degree in launcher and design major from Beijing Institute of Technology in 1993, and Master’s degree in flight mechanics from Beijing Institute of Technology in 1996. He received his Ph.D. degree in aircraft design from Beijing Institute of Technology in 1999. He is an adjunct professor in Beijing Institute of Technology. His research interests include control and guidance technology. E-mail:
1010@bit.edu.cn -
Supported by:This work was supported by the Defense Science and Technology Key Laboratory Fund of Luoyang Electro-optical Equipment Institute, Aviation Industry Corporation of China (6142504200108).
引用本文
. [J]. Journal of Systems Engineering and Electronics, 2021, 32(6): 1509-1526.
Yue LI, Xianghua WEN, Wei LI, Lan WEI, Qunli XIA. Influence of roll-pitch seeker DRR and parasitic loop on Lyapunov stability of guidance system[J]. Journal of Systems Engineering and Electronics, 2021, 32(6): 1509-1526.
"

"
"
"
"
"

"
"
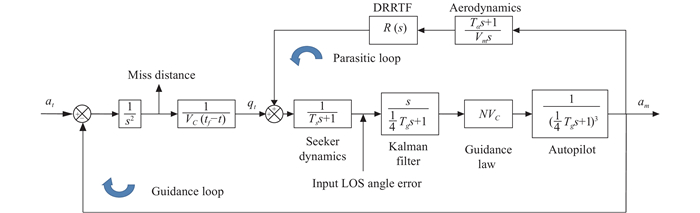
| Disturbance torque | DRRTF | Equivalent coefficient |
| Spring torque | | |
| Damping torque | | |

"

"

"
"
"
| Parameter | Physical meaning | Parameter type | Values range |
| | Dimensionless equivalent time constant | Constant | 0.01 |
| | Proportional guidance coefficient | Constant | 4 |
| | The ratio of relative velocity to missile velocity | Constant | 1.5 |
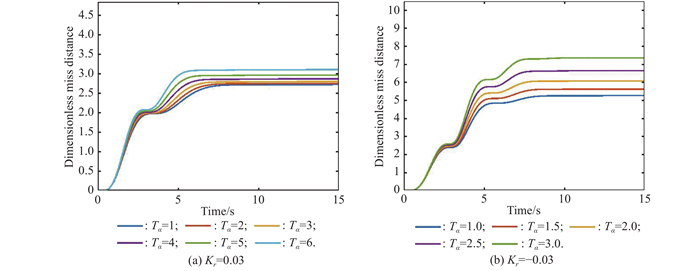
| | Dimensionless angle of attack time constant | Variable | 1?3 |
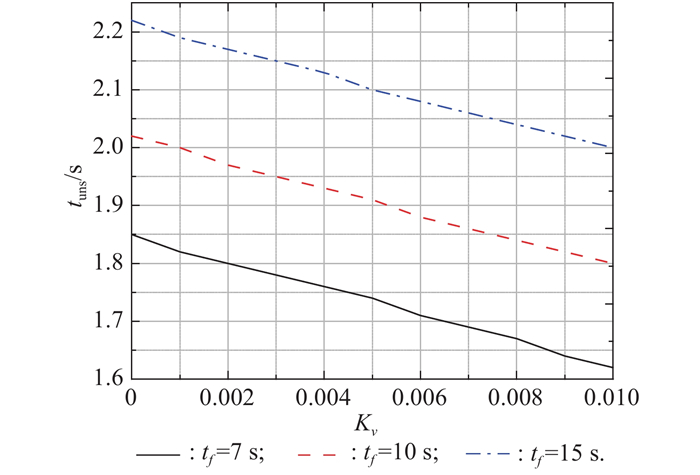
| | Dimensionless terminal guidance time | Variable | 6?15 |
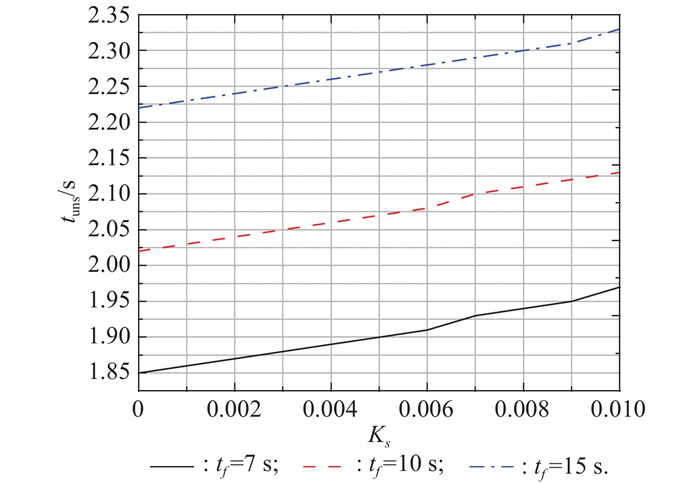
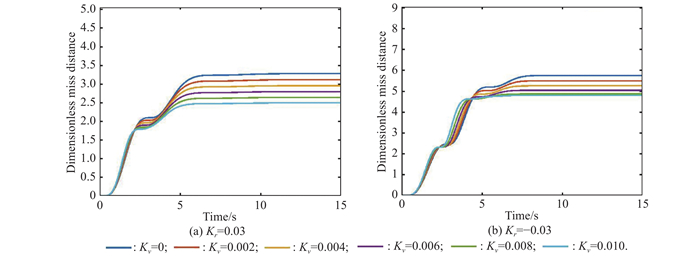
| | Spring torque equivalent coefficient | Variable | 0?0.01 |
| | Damping torque equivalent coefficient | Variable | 0?0.01 |
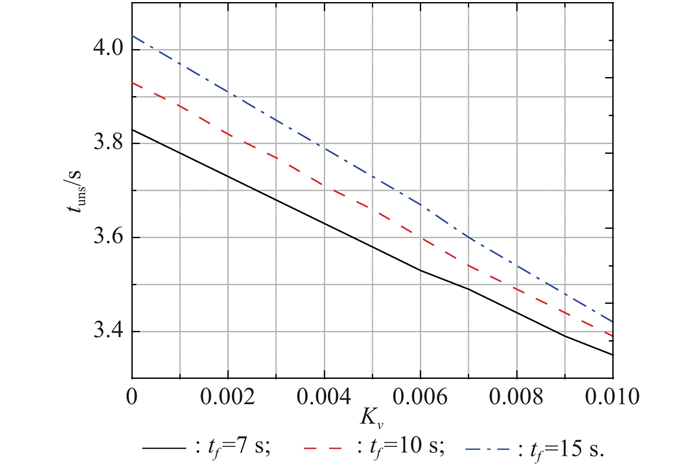
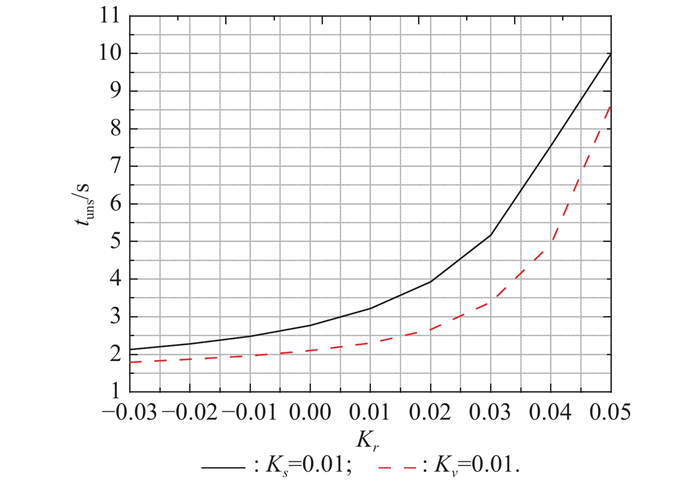
| | DRR equivalent coefficient | Variable | ?0.03?0.03 |
"
"
"
"
"
"
"
"
"
"
"

"
"
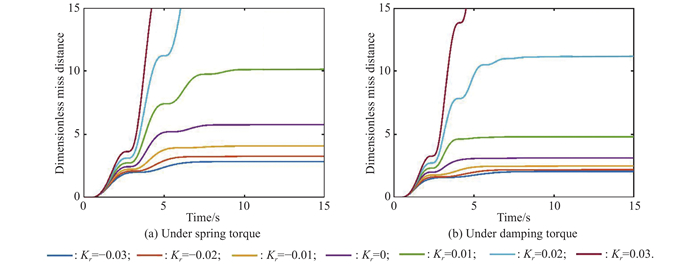
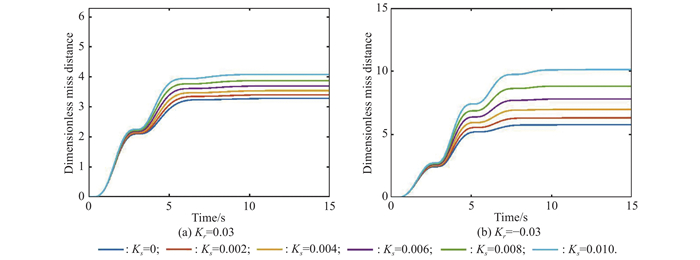
| Figure | Torque | Parameter | Description |
| Spring | | Verify Conclusion 1: the influence of | |
| Damping | | ||
| Spring | | Verify Conclusion 2: the influence of | |
| Spring | | ||
| Damping | | Verify Conclusion 2: the influence of | |
| Damping | | ||
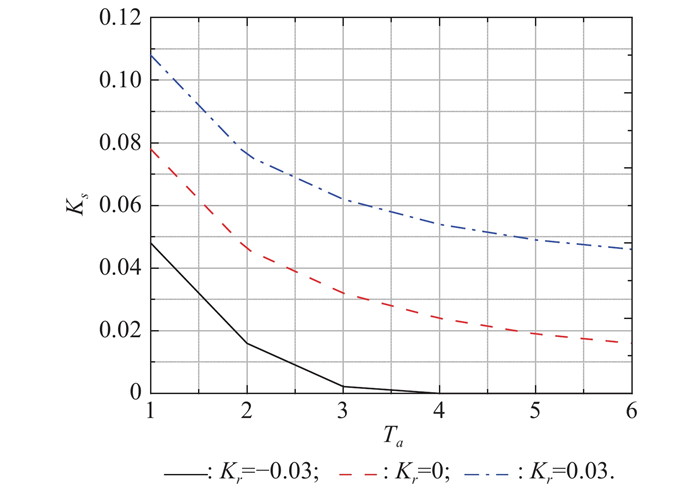
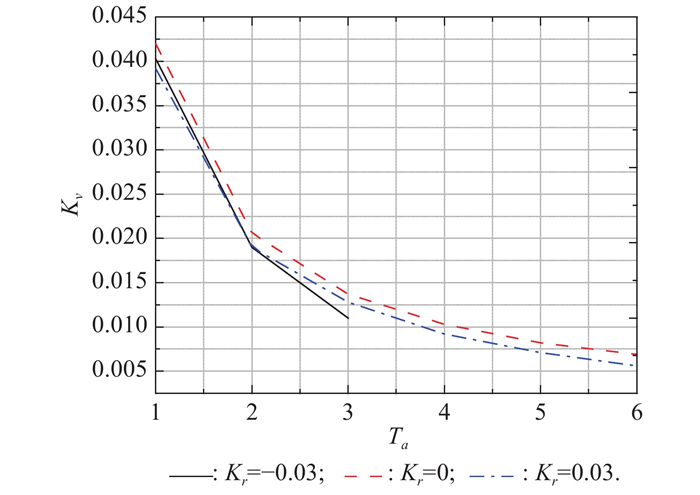
| Spring | | Verify Conclusion 3: the influence of | |
| Spring | | ||
| Damping | | Verify Conclusion 3: the influence of | |
| Damping | |
"
"
"
"
"
| 1 |
GUO Y, GUO J H, LIU X, et al Finite-time blended control for air-to-air missile with lateral thrusters and aerodynamic surfaces. Aerospace Science and Technology, 2020, 97, 105638.
doi: 10.1016/j.ast.2019.105638 |
| 2 |
HUI Y L, NAN Y, CHEN S D, et al Dynamic attack zone of air-to-air missile after being launched in random wind field. Chinese Journal of Aeronautics, 2015, 28 (5): 1519- 1528.
doi: 10.1016/j.cja.2015.08.013 |
| 3 |
LIU H Q, YU L, RUAN C W, et al Tracking air-to-air missile using proportional navigation model with genetic algorithm particle filter. Mathematical Problems in Engineering, 2016.
doi: 10.1155/2016/3921608 |
| 4 |
MORTAZAVI M R, ALMASGANJ F Optimal midcourse guidance of an air-to-air missile via SVM and RVM. Soft Computing, 2019, 23 (15): 6603- 6616.
doi: 10.1007/s00500-018-3308-5 |
| 5 |
LI S Y, YANG K, MA J, et al Anti-interference recognition method of aerial infrared targets based on the Bayesian network. Journal of Optics, 2021, 50 (2): 264- 277.
doi: 10.1007/s12596-021-00701-2 |
| 6 | LEONID A B, SERGEY A L, VLADLENA V O Air-to-air missile guidance For nonmaneuverable target interception at maximum distance. TsAGI Science Journal, 2019, 49 (7): 753- 770. |
| 7 | DONG Z W, GAO F, SUN L, et al. Research on fault intelligent reasoning and diagnosis of air-to-air missile weapon system of a certain armed helicopter. Proc. of the 11th International Conference on Machine Learning and Computing 2019: 147−150. |
| 8 |
LI J Q, LI J, QIN L, et al Optimal design and analysis on high overload buffer structure of passive semi-strapdown inertial navigation system. Sensors, 2020.
doi: 10.3390/s20041131 |
| 9 |
JING Z Y, ZHENG T, LI J, et al Optimized design of an anti-rotation and anti-overload structure based on missile-borne semi-strap-down inertial navigation system. IEEE Access, 2019, 7, 179646- 179657.
doi: 10.1109/ACCESS.2019.2957452 |
| 10 | LIU F, WANG H, AUBRY R. The effects of matched filter on stable performance of semistrapdown inertially stabilized platform. Mathematical Problems in Engineering, 2016. DOI: 10.1155/2016/8389350. |
| 11 |
ZHOU X Y, JIA Y, ZHAO Q, et al Experimental validation of a compound control scheme for a two-axis inertially stabilized platform with multi-sensors in an unmanned helicopter-based airborne power line inspection system. Sensors, 2016, 16 (3): 366.
doi: 10.3390/s16030366 |
| 12 | XIE C J, WANG Z Q, WANG R, et al Feed forward compensation control of dual-axis photoelectric stabilized platform. Journal of Coastal Research, 2015, 2015 (73): 771- 775. |
| 13 |
ZHANG M Y, GUAN Y L, ZHAO W W Adaptive super-twisting sliding mode control for stabilization platform of laser seeker based on extended state observer. Optik-International Journal for Light and Electron Optics, 2019, 199, 163337.
doi: 10.1016/j.ijleo.2019.163337 |
| 14 |
FU C Y, TIAN Y T, HUANG H Y, et al Finite-time trajectory tracking control for a 12-rotor unmanned aerial vehicle with input saturation. ISA Transactions, 2018, 81, 52- 62.
doi: 10.1016/j.isatra.2018.08.005 |
| 15 |
PUNEET M, VINEET K, RANA K P A fractional order fuzzy PID controller for binary distillation column control. Expert Systems with Applications, 2015, 42 (22): 8533- 8549.
doi: 10.1016/j.eswa.2015.07.008 |
| 16 |
ZHANG M Y, LIU H, ZHANG H W, et al A hybrid control strategy for the optoelectronic stabilized platform of a seeker. Optik-International Journal for Light and Electron Optics, 2019, 181, 1000- 1012.
doi: 10.1016/j.ijleo.2018.12.168 |
| 17 |
ZHENG D, LIN D F, XU X H, et al Dynamic stability of rolling missile with proportional navigation & PI autopilot considering parasitic radome loop. Aerospace Science and Technology, 2017, 67, 41- 48.
doi: 10.1016/j.ast.2017.03.036 |
| 18 |
LIN S Y, WANG W, LIN W, et al The research of loop-shaping method to mitigate the total error effect in air-to-air missiles. Optik-International Journal for Light and Electron Optics, 2019, 181, 923- 932.
doi: 10.1016/j.ijleo.2018.12.162 |
| 19 |
TIAN S, LIN D F, WANG J, et al Dynamic stability of rolling missiles with angle-of-attack feedback three-loop autopilot considering parasitic effect. Aerospace Science and Technology, 2017, 71, 592- 602.
doi: 10.1016/j.ast.2017.10.023 |
| 20 |
LI W, WEN Q Q, YANG Y Stability analysis of spinning missiles induced by seeker disturbance rejection rate parasitical loop. Aerospace Science and Technology, 2019, 90, 194- 208.
doi: 10.1016/j.ast.2019.04.013 |
| 21 |
LIU S X, DU X, XIA Q L An on-line compensation method for the disturbance rejection rate of seekers. Optik-International Journal for Light and Electron Optics, 2018, 157, 1306- 1318.
doi: 10.1016/j.ijleo.2017.12.084 |
| 22 |
DU X, LV R, TU H F, et al The research on infrared seeker with disturbance rejection effect parasitic. Optik-International Journal for Light and Electron Optics, 2018, 170, 409- 419.
doi: 10.1016/j.ijleo.2018.05.107 |
| 23 | LIU S X, LU T Y, SHANG T, et al. Dynamic modeling and coupling characteristic analysis of two-axis rate gyro seeker. International Journal of Aerospace Engineering, 2018. DOI: 10.1155/2018/8513684. |
| 24 |
CHEN K W, XIA Q L, DU X, et al Influence of seeker disturbance rejection and Radome error on the Lyapunov stability of guidance systems. Mathematical Problems in Engineering, 2018.
doi: 10.1155/2018/1890426 |
| 25 | HE F X, DAI L, CHEN Q S, et al Three-dimensional stability analysis of robotic machining process. Industrial Robot: An International Journal, 2020, 47 (1): 82- 89. |
| 26 |
TOCINO A, SENOSIAIN M MS-stability of nonnormal stochastic differential systems. Journal of Computational and Applied Mathematics, 2020, 379, 112950.
doi: 10.1016/j.cam.2020.112950 |
| 27 |
BAI R, XIA Q L, DU X The study of guidance performance of a phased array seeker with platform. Optik-International Journal for Light and Electron Optics, 2017, 132, 9- 23.
doi: 10.1016/j.ijleo.2016.12.022 |
| 28 |
LI X D, YANG X Y Lyapunov stability analysis for nonlinear systems with state-dependent state delay. Automatica, 2020, 112, 108674.
doi: 10.1016/j.automatica.2019.108674 |
| 29 |
JOSINEY A S, LUANA H T Lyapunov stability for impulsive control affine systems. Journal of Differential Equations, 2018.
doi: 10.1016/j.jde.2018.09.033 |
| 30 |
LIU X, MO B, LIU F X Line-of-sight stabilization of roll-pitch seeker using differentiator-based disturbance compensation control. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2020, 234 (7): 1326- 1339.
doi: 10.1177/0954410020902665 |
| 31 | WANG X C, MO B, LI X, et al. Predictive functional control-based zenith pass controller design for roll-pitch seeker. International Journal of Aerospace Engineering, 2020. DOI: 10.1155/2020/9709341. |
| 32 | LIU S X. Application of roll-pitch seeker to air-to-air missile guidance system. Beijing: Beijing Institute of Technology, 2019. (in Chinese) |
| 33 | BAI R. Key technology of roll-pitch seeker and its application to air-to-air missile. Beijing: Beijing Institute of Technology, 2017. (in Chinese) |
| 34 | KHALIL H K. Nonlinear systems (third edition). New Jersey: Prentice-Hall, Inc, 2002. |
| 35 | MARYAM F, SOHEIL G, HEIDAR A T, et al A novel cooperative teleoperation framework for nonlinear time-delayed single-master/multi-slave system. Robotica, 2019, 38 (3): 475- 492. |
| No related articles found! |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||