Journal of Systems Engineering and Electronics ›› 2021, Vol. 32 ›› Issue (6): 1490-1508.doi: 10.23919/JSEE.2021.000126
-
收稿日期:2020-12-02接受日期:2021-11-09出版日期:2022-01-05发布日期:2022-01-05
A learning-based flexible autonomous motion control method for UAV in dynamic unknown environments
Kaifang WAN*( ), Bo LI(), Xiaoguang GAO(), Zijian HU(), Zhipeng YANG()
), Bo LI(), Xiaoguang GAO(), Zijian HU(), Zhipeng YANG()
- 1 School of Electronic and Information, Northwestern Polytechnical University, Xi’an 710072, China
-
Received:2020-12-02Accepted:2021-11-09Online:2022-01-05Published:2022-01-05 -
Contact:Kaifang WAN E-mail:wankaifang@nwpu.edu.cn;Libo803@nwpu.edu.cn;cxg2012@nwpu.edu.cn;huzijian@mail.nwpu.edu.cn;yzp@mail.nwpu.edu.cn -
About author:|WAN Kaifang was born in 1987. He received his B.E. degree in detection homing and control technology from Northwestern Polytechnical University (NWPU), Xi’an, in 2010. He received his Ph.D. degree in system engineering in 2016 from NWPU. Now he is an assistant researcher of the Key Laboratory of Aerospace Information Perception and Photoelectric Control of the Ministry of Education, NWPU. His current research interests include sensor management application, multi-agent theory, approximate dynamic programming, and reinforcement learning theory. E-mail:
wankaifang@nwpu.edu.cn ||LI Bo was born in 1978. He received his B.S. degree in electronic information technology and his M.S. and Ph.D. degree in systems engineering from Northwestern Polytechnical University (NWPU), Xi’an, in 2000, 2003, and 2008, respectively. He was a postdoctoral fellow with NWPU from 2008 to 2010. He is currently an associate professor with the School of Electronics and Information, NWPU. His current research interests include intelligent command and control, deep reinforcement learning, and uncertain information processing. E-mail:
Libo803@nwpu.edu.cn ||GAO Xiaoguang was born in 1957. She received her B.E. degree in detection homing and control technology from Northwestern Polytechnical University (NWPU) in 1982. She completed her master degree in system engineering from NWPU in 1986. She received her Ph.D. degree from NWPU in 1989. She is currently a professor and the head of the Key Laboratory of Aerospace Information Perception and Photoelectric Control of the Ministry of Education, NWPU. Her research interests are machine learning theory, Bayesian network theory, and multi-agent control application.E-mail: cxg2012@nwpu.edu.cn|
|HU Zijian was born in 1996. He received his B.E. degree in detection guidance and control technology from Northwestern Polytechnical University (NWPU), Xi’an in 2018. He is currently pursuing his Ph.D. degree in the College of Electronic and Information, NWPU. His current research interests include reinforcement learning theory and the applications of reinforcement learning in UAV control and fire control systems. E-mail:
huzijian@mail.nwpu.edu.cn ||YANG Zhipeng was born in 1995. He received his B.S. degree in electrical engineering and automation from Hubei University of Technology, Wuhan, in 2016. He is currently a postgraduate student with the School of Electronics and Information, Northwestern Polytechnical University. His current research interest is intelligent maneuver decision for unmanned systems. E-mail:
yzp@mail.nwpu.edu.cn -
Supported by:This work was supported by the National Natural Science Foundation of China (62003267), the Natural Science Foundation of Shaanxi Province (2020JQ-220), and the Open Project of Science and Technology on Electronic Information Control Laboratory (JS20201100339)
引用本文
. [J]. Journal of Systems Engineering and Electronics, 2021, 32(6): 1490-1508.
Kaifang WAN, Bo LI, Xiaoguang GAO, Zijian HU, Zhipeng YANG. A learning-based flexible autonomous motion control method for UAV in dynamic unknown environments[J]. Journal of Systems Engineering and Electronics, 2021, 32(6): 1490-1508.
"
"

"

"
"
"

"

"
| Name | Definition of algorithms |
| DQN | DQN with an intermediate reward and a stable learning rate |
| DQN with DA1 | DQN with an intermediate reward and a variable learning rate |
| DQN with DA2 | DQN with a difference amplified reward and a stable learning rate |
| DQN with DA3 | DQN with a difference amplified reward and a variable learning rate |
"
"
| Controller | Hit rate at final convergence | Episode number when the hit rate first reaches 80% | |||||||
| +Null | +DA1 | +DA2 | +DA3 | +Null | +DA1 | +DA2 | +DA3 | ||
| DQN | 0.721 | 0.844 | 0.795 | 0.894 | ? | 3995 | 4397 | 3084 | |
| Double DQN | 0.812 | 0.853 | 0.867 | 0.925 | 4983 | 3567 | 3854 | 2902 | |
| Dueling DQN | 0.854 | 0.863 | 0.910 | 0.956 | 4125 | 3458 | 3541 | 2756 | |

"

"
"
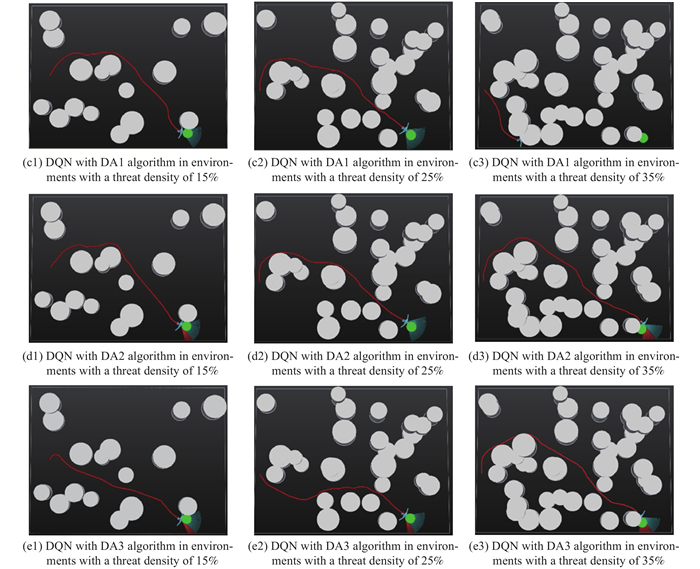
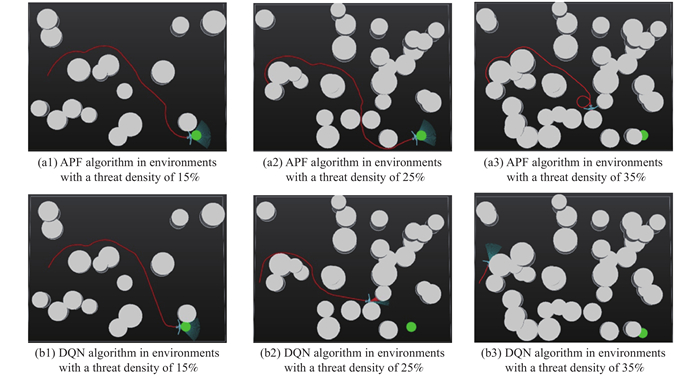
| Controller | Environment with a threat density of 15% | Environment with a threat density of 25% | Environment with a threat density of 35% | |||||
| Flight time/s | Path length/m | Flight time/s | Path length/m | Flight time/s | Path length/m | |||
| APF | 21.0 | 420 | 24.1 | 482 | Crash | Crash | ||
| DQN | 20.0 | 400 | Crash | Crash | Crash | Crash | ||
| DQN with DA1 | 19.0 | 380 | 20.1 | 402 | Crash | Crash | ||
| DQN with DA2 | 18.8 | 376 | 19.7 | 394 | 23.1 | 462 | ||
| DQN with DA3 | 15.8 | 316 | 17.3 | 346 | 22.1 | 442 | ||

"
"
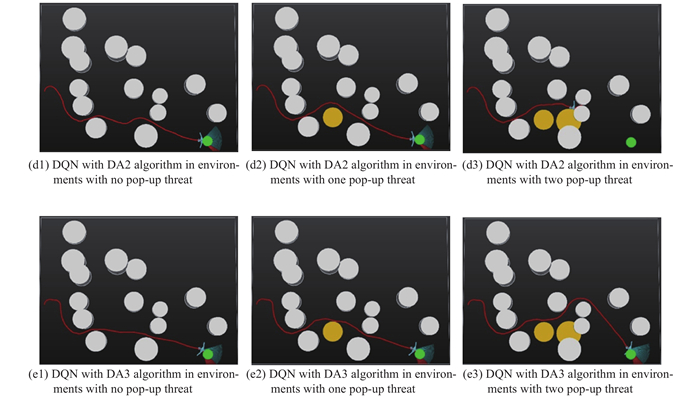
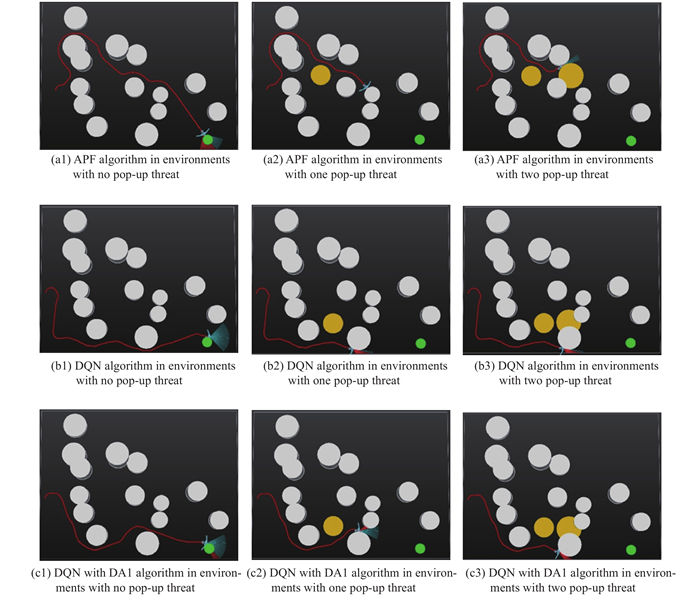
| Controller | No pop-up threat | One pop-up threat | Two pop-up threats | |||||
| Flight time/s | Path length/m | Flight time/s | Path length/m | Flight time/s | Path length/m | |||
| APF | 26.2 | 524 | Crash | Crash | Crash | Crash | ||
| DQN | 23.0 | 460 | Crash | Crash | Crash | Crash | ||
| DQN with DA1 | 21.0 | 420 | Crash | Crash | Crash | Crash | ||
| DQN with DA2 | 19.1 | 382 | 20.1 | 402 | Crash | Crash | ||
| DQN with DA3 | 18.9 | 378 | 19.6 | 392 | 22.1 | 442 | ||

"

"
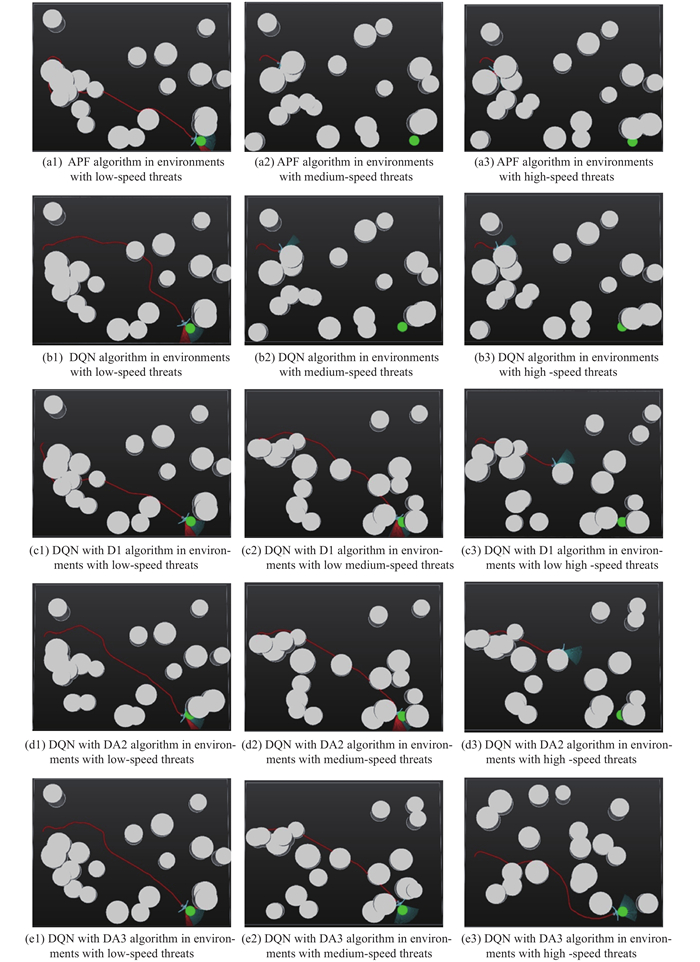
"
| Controller | Low-speed threat | Medium-speed threat | High-speed threat | |||||
| Flight time/s | Path length/m | Flight time/s | Path length/m | Flight time/s | Path length/m | |||
| APF | 22.2 | 444 | Crash | Crash | Crash | Crash | ||
| DQN | 20.3 | 406 | Crash | Crash | Crash | Crash | ||
| DQN with DA1 | 19.2 | 384 | 18.7 | 374 | Crash | Crash | ||
| DQN with DA2 | 19.1 | 382 | 18.2 | 364 | Crash | Crash | ||
| DQN with DA3 | 18.7 | 374 | 17.9 | 358 | 18.5 | 370 | ||

"
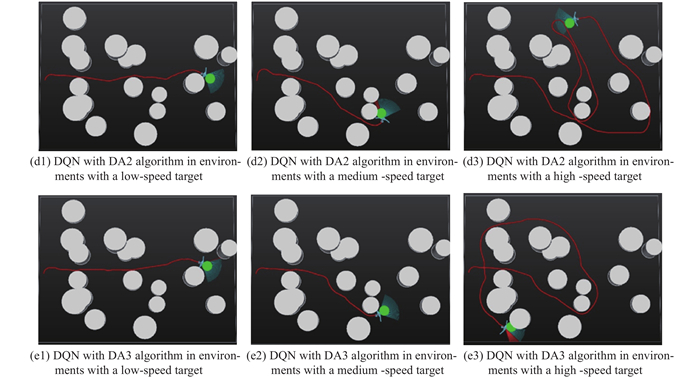

"
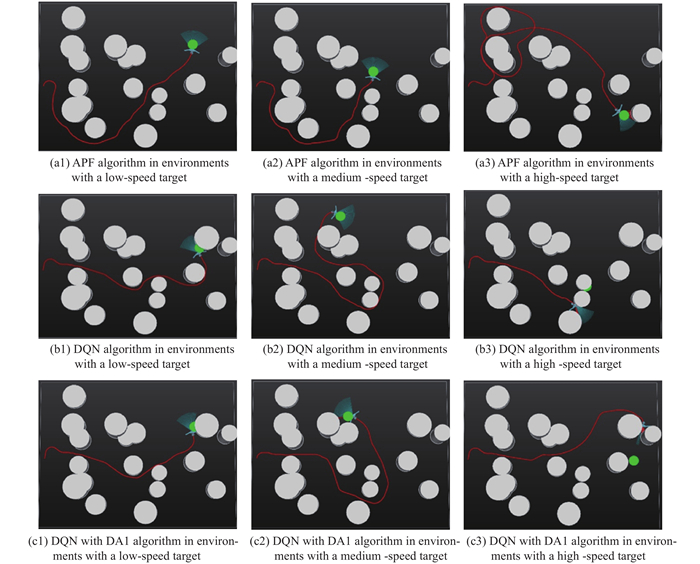
"
| Controller | Low-speed target (10 m/s) | Medium-speed target (15 m/s) | High-speed target (20 m/s) | |||||
| Flight time/s | Path length/m | Flight time/s | Path length/m | Flight time/s | Path length/m | |||
| APF | 24.5 | 490 | 20.8 | 416 | 48.1 | 962 | ||
| DQN | 22.0 | 440 | 30.8 | 616 | Crash | Crash | ||
| DQN with DA1 | 19.3 | 386 | 25.6 | 512 | Crash | Crash | ||
| DQN with DA2 | 17.3 | 346 | 16.0 | 320 | 61.9 | 1 238 | ||
| DQN with DA3 | 16.9 | 338 | 14.6 | 292 | 43.9 | 878 | ||
| 1 | STEVENS R C, SADJADI F A, et al. Small unmanned aerial vehicle (UAV) real-time intelligence, surveillance and reconnaissance (ISR) using onboard pre-processing. Proc. of the SPIE, 2008: 6967. |
| 2 | DARRAH M, NILAND W, STOLARIK B, et al. UAV cooperative task assignments for a SEAD mission using genetic algorithms. Proc. of AIAA Guidance, Navigation, and Control Conference and Exhibit, 2006. DOI: 10.2514/6.2006-6456. |
| 3 | TOMIC T, SCHMID K, LUTZ P, et al Toward a fully autonomous UAV: research platform for indoor and outdoor urban search and rescue. IEEE Robotics & Automation Magazine, 2012, 19 (3): 46- 56. |
| 4 |
SHAKHATREH H, SAWALMEH A, AL-FUQAHA A, et al Unmanned aerial vehicles (UAVs): a survey on civil applications and key research challenges. IEEE Access, 2019, 7, 48572- 48634.
doi: 10.1109/ACCESS.2019.2909530 |
| 5 | WAN K F, GAO X G, HU Z J, et al. A RDA-based deep reinforcement learning approach for autonomous motion planning of UAV in dynamic unknown environments. Proc. of the 4th International Conference on Control Engineering and Artificial Intelligence, 2020. DOI: 10.26914/c.cnkihy.2020.002792. |
| 6 | IMANBERDIYEV N, FU C, KAYACAN E, et al. Autonomous navigation of UAV by using real-time model-based reinforcement learning. Proc. of the 14th International Conference on Control, Automation, Robotics and Vision, 2016: 1−6. |
| 7 |
WAN K F, GAO X G, HU Z J, et al Robust motion control for UAV in dynamic uncertain environments using deep reinforcement learning. Remote Sensing, 2020, 12 (4): 640- 661.
doi: 10.3390/rs12040640 |
| 8 | CHEE K Y, ZHONG Z W Control, navigation and collision avoidance for an unmanned aerial vehicle. Sensors and Actuators A: Physical, 2013, 190 (1): 66- 76. |
| 9 | PANAGOU D A distributed feedback motion planning protocol for multiple unicycle agents of different classes. IEEE Trans. on Automatic Control, 2016, 62 (3): 1178- 1193. |
| 10 | ISRAELSEN J, BEALL M, BAREISS D, et al. Automatic collision avoidance for manually tele-operated unmanned aerial vehicles. Proc. of the IEEE International Conference on Robotics and Automation, 2014: 6638−6643. |
| 11 | YANG X, DING M Y, ZHOU C. Fast marine route planning for UAV using improved sparse A* algorithm. Proc. of the 4th International Conference on Genetic and Evolutionary Computing, 2011: 190−193. |
| 12 | DUAN H B, PEI L. UAV path planning. Berlin: Springer, 2014. |
| 13 |
WAN K F, GAO X G, LI B Using approximate dynamic programming for multi-ESM scheduling to track ground moving targets. Journal of Systems Engineering and Electronics, 2018, 29 (1): 74- 85.
doi: 10.21629/JSEE.2018.01.08 |
| 14 |
YANG Q M, ZHANG J D, SHI G Q Modeling of UAV path planning based on IMM under POMDP framework. Journal of Systems Engineering and Electronics, 2019, 30 (3): 545- 554.
doi: 10.21629/JSEE.2019.03.12 |
| 15 |
DONG Z N, ZHANG R L, CHEN Z J, et al Study on UAV path planning approach based on fuzzy virtual force. Chinese Journal of Aeronautics, 2010, 23 (3): 341- 350.
doi: 10.1016/S1000-9361(09)60225-9 |
| 16 | BREZOESCU A, ESPINOZA T, CASTILLO P, et al Adaptive trajectory following for a fixed-wing UAV in presence of crosswind. Journal of Intelligent & Robotic Systems, 2013, 69 (1/4): 257- 271. |
| 17 |
FADLULLAH Z M, TAKAISHI D, NISHIYAMA H, et al A dynamic trajectory control algorithm for improving the communication throughput and delay in UAV-aided networks. IEEE Network, 2016, 30 (1): 100- 105.
doi: 10.1109/MNET.2016.7389838 |
| 18 | GEE T, JAMES J, MARK W, et al. Lidar guided stereo simultaneous localization and mapping (SLAM) for UAV outdoor 3-D scene reconstruction. Proc. of the International Conference on Image and Vision Computing, 2016: 1−6. |
| 19 | PANCHPOR A A, SHUE S, CONRAD JM, et al. A survey of methods for mobile robot localization and mapping in dynamic indoor environments. Proc. of the Conference on Signal Processing & Communication Engineering Systems, 2018: 138−144. |
| 20 | ALTAN A, BAYRAKTAR K, HACIOGLU R, et al. Simultaneous localization and mapping of mines with unmanned aerial vehicle. Proc. of the 24th Signal Processing and Communication Application Conference, 2016: 1433−1436. |
| 21 | FU C H, OLIVARES M, SUAREZ R, et al Monocular visual-inertial slam-based collision avoidance strategy for fail-safe UAV using fuzzy logic controllers. The International Journal of Robotics Research, 2014, 73 (4): 513- 533. |
| 22 | SUTTON R S, BARTO A G. Reinforcement learning: an introduction. 2nd ed. Cambridge, US: MIT Press, 2017. |
| 23 | KERSANDT K. Deep reinforcement learning as control method for autonomous UAV. Barcelona, Spain: University of Catalonia, 2017 |
| 24 |
VOLODYMYR M, KORAY K, David S, et al Human-level control through deep reinforcement learning. Nature, 2015, 518 (7540): 529- 533.
doi: 10.1038/nature14236 |
| 25 | HASSELT H V, GUEZ A, SILVER D. Deep reinforcement learning with double Q-learning. Proc. of the 30th AAAI Conference on Artificial Intelligence, 2016. arXiv: 1509.06461. |
| 26 | WANG Z Y, SCHAUL T, MATTEO H, et al. Dueling network architectures for deep reinforcement learning. Proc. of the 33rd International Conference on Machine Learning, 2016, 48: 1995–2003. |
| 27 | FAN D D, THEODOROU E, REEDER J, et al. Model-based stochastic search for large scale optimization of multi-agent UAV swarms. Proc. of the IEEE Symposium Series on Computational Intelligence, 2017. arXiv: 1803.01106. |
| 28 |
WANG C, WANG J, SHEN Y, et al Autonomous navigation of UAVs in large-scale complex environments: a deep reinforcement learning approach. IEEE Trans. on Vehicular Technology, 2019, 68 (3): 2124- 2136.
doi: 10.1109/TVT.2018.2890773 |
| 29 | ALEJANDRO R R, CARLOS S, HRIDAY B, et al A deep reinforcement learning strategy for UAV autonomous landing on a moving platform. Journal of Intelligent & Robotic Systems, 2018, 93, 351- 366. |
| 30 | KOCH W, MANCUSO R, WEST R, et al Reinforcement learning for uav attitude control. ACM Trans. on Cyber-Physical Systems, 2019, 3 (2): 1- 21. |
| 31 | LILLICRAP T T, HUNT J J, PRITZEL A, et al. Continuous control with deep reinforcement learning. arXiv, 2015. arXiv: 1509.02971. |
| 32 | SCHULMAN J, LEVINE S, MORITZ P, et al. Trust region policy optimization. Proc. of the 32nd International Conference on Machine Learning, 2015. arXiv:1502.05477. |
| 33 | SCHULMAN J, WOLSKI F, DHARIWAL P, et al. Proximal policy optimization algorithms. arXiv, 2017. arXiv:1707.06347. |
| 34 | HERNANDEZ E G, ARANDA E. Convergence and collision avoidance in formation control: a survey of the artificial potential functions approach. ALKHATEEB F, MAGHAYREH A E, DOUSH A I, ed. Multi-agent systems-modeling, control, programming, simulations and applications. InTechOpen, 2011: 103−126. |
| 35 | LUCA A D, ORIOLO G. Local incremental planning for nonholonomic mobile robots. Proc. of the IEEE International Conference on Robotics and Automation, 1994. DOI: 10.1109/ROBOT.1994.351003. |
| 36 |
LOIZOU S G, KYRIAKOPOULOS K J Navigation of multiple kinematically constrained robots. IEEE Trans. on Robotics, 2008, 24 (1): 221- 231.
doi: 10.1109/TRO.2007.912092 |
| 37 | KIM J O, KHOSLA P K. Real-time obstacle avoidance using harmonic potential functions. IEEE Trans. on Robotics and Automation, 1992, 8(3): 338–349. |
| 38 | LAWRENCE D A, FREW E W, PISANO W Lyapunov guidance vector fields for autonomous unmanned aircraft flight control. Journal of Guidance, Control, and Dynamics, 2012, 31 (5): 1220- 1229. |
| 39 |
FREW E W, LAWRENCE D A, MORRIS S Coordinated standoff tracking of moving targets using Lyapunov guidance vector. Journal of Guidance, Control, and Dynamics, 2008, 31 (2): 290- 306.
doi: 10.2514/1.30507 |
| 40 | PARK S Circling over a target with relative side bearing. Journal of Guidance Control & Dynamics, 2016, 39 (6): 1- 7. |
| 41 | JUNG W, LIM S, LEE D, et al Unmanned aircraft vector field path following with arrival angle control. Journal of Intelligent & Robotic Systems, 2016, 84, 311- 325. |
| 42 | NAMHOON C, YOUDAN K, SANGHYUK P. Three-dimensional nonlinear differential geometric path-following guidance law. Journal of Guidance, Control, and Dynamics, 2015, 38(12). DOI: https://doi.org/10.2514/1.G001060. |
| 43 |
SAMUELSON W, ZECKHAUSER R Status quo bias in decision making. Journal of Risk and Uncertainty, 1988, 1, 7- 59.
doi: 10.1007/BF00055564 |
| 44 | DIXON C. Controlled mobility of unmanned aircraft chains to optimize network capacity in realistic communication environments. Colorado, US: University of Colorado, 2010. |
| 45 | QUINTERO S, COLLINS G, HESPANHA J. Flocking with fixed-wing UAVs for distributed sensing: a stochastic optimal control approach. Proc. of the American Control Conference, 2013. DOI: 10.1109/ACC.2013.6580133. |
| 46 |
WU G F, GAO X G, FU X W Mobility control of unmanned aerial vehicle as communication relay in airborne multi-user systems. Chinese Journal of Aeronautics, 2019, 32 (6): 1520- 1529.
doi: 10.1016/j.cja.2019.02.010 |
| 47 | HORGAN D, QUAN J, BUDDEN D, et al. Distributed prioritized experience replay. arXiv, 2018. arXiv:1803.00933. |
| 48 | IVANOV S, YAKONOV A. Modern deep reinforcement learning algorithms. arXiv preprint, arXiv:1906.10025, 2019. |
| 49 | HU Z J, WAN K F, GAO X G, et al A dynamic adjusting reward function method for deep reinforcement learning with adjustable parameters. Mathematical Problems in Engineering, 2019, 7619483. |
| No related articles found! |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||